Setup problems on new boards (Sensors and QGC connection problems)
-
Hi Ansel, sorry you ran into issues. I think the solutions though are here: https://docs.modalai.com/flight-core-v2-firmware/
-
Hi @Chad-Sweet,
We followed all instructions on the 'general user guide' as listed to install v1.13.2-0.1.1 and that's where we're running into issues.
Are there further steps we have to take to get it working right (e.g. using an STLink)? Our reading of that page was that we didn't need to go through the steps in the developer guide below as we're not doing anything custom with these.
Any further guidance would be appreciated, we did this on two separate boards with the same result.
-
What interface are you trying to connect to QGC, the USB port? In our field testing, the team connects to QGC over USB. We've not experienced connection issues to QGC over USB so I'm not certain what's going on there (I'm using QGC 4.2 in my setup).
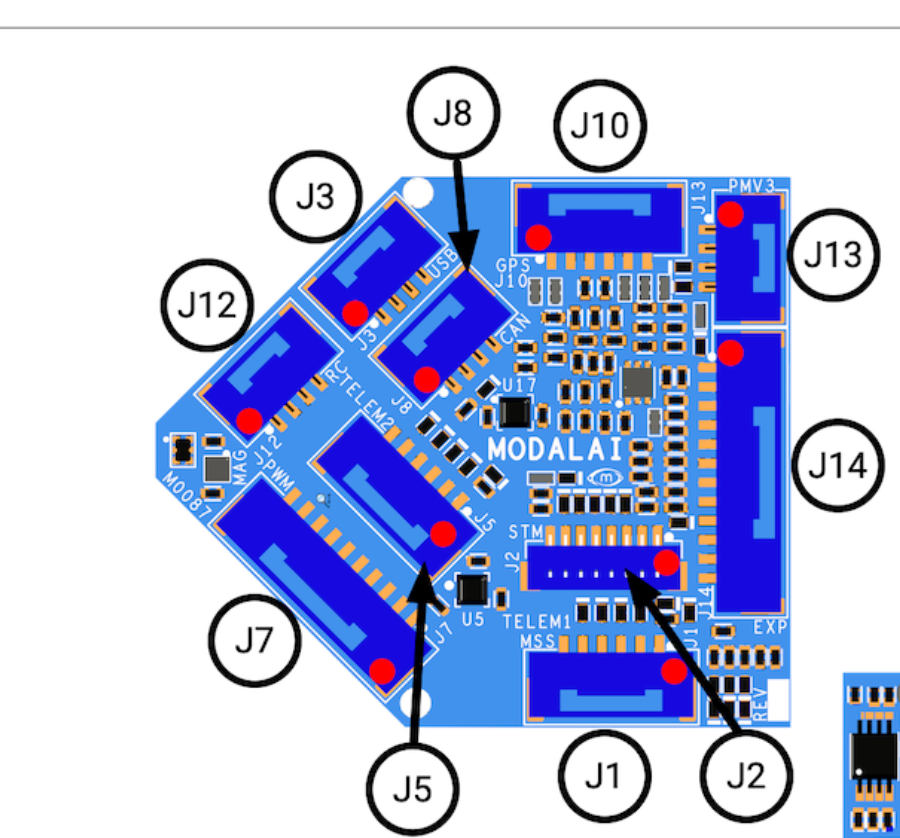
J3 is the USB port (from here)
Agreed the mag isn't enabled by default, we have it on board if needed, our testing team preferred this off by default which is why it's shipping like that, but can be enabled here, rebuilt, and flashed using px_loader:
https://github.com/modalai/px4-firmware/blob/modalai-1.13.2/boards/modalai/fc-v2/init/rc.board_sensors#L25As the (light weight) user guide shows, the FW update using QGC directly isn't working although px_loader.py is, to update the target.
-
Hi @modaltb,
Making some progress here, that explains the MAG question, thanks for the clarification on that!
I've been doing some troubleshooting with the various v2 boards we have and this is what I've found:
-We're definitely using the J3 port for USB
-We bought three new v2 boards, none of them connect natively to QGC (v4.2.4, tested on multiple computers)
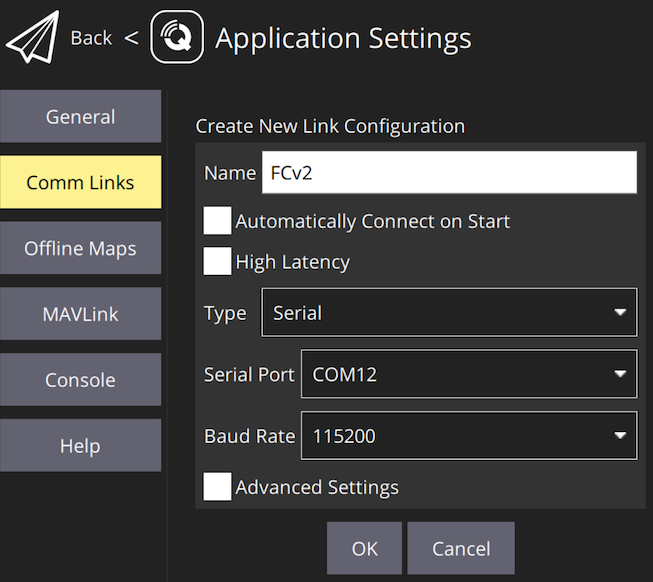
-In order to connect it needs a manual COMM link for any of these three boards to be recognized, and must be set to a BAUD rate of 115200
-We upgraded FW on two of the boards and have one left in its default shipped stateThe board in the default state is mostly working aside from the QGC connection issue.
-
The one board we have not updated the FW still has the Attitude Estimator working when it connects via the manual COMM link in QGC. This might be an earlier FW version because the compass is working without an external MAG plugged in so it seems the onboard MAG is enabled on this particular board (FW v1.13.1dev, custom FW v0.0.9). The J12 port is a beige instead of yellow on the other two boards, I don't think that would make a difference but wanted to mention it in case.
-
The two boards we updated the FW as per px_loader.py seem to have issues around the attitude estimator no longer booting up once the new FW is installed (v1.13.2 custom FW ver 0.1.1)
Any thoughts on what could be causing this? Could there be an issue with the more recent FW file? The difference in FW versions seems to be the only difference we can see, aside from the fact that QGC still won't recognize any of the boards without a manual COMM link that you don't seem to be having the same problem with.
As always, any thoughts or troubleshooting help is greatly appreciated!
-
-
Hi @Ansel-Misfeldt ,
For the connection issue I'd like to try to understand what's happening! What host OS for QGC are you using? I just rechecked on Ubuntu/OSX (will check Windows later):
Here's what I see on OSX:
lsusb ... Bus 020 Device 006: ID 0483:a330 STMicroelectronics PX4 FMU ModalAI FCv2 Serial: 0On Ubuntu:
lsusb ... Bus 002 Device 005: ID 0483:a330 STMicroelectronicsI have a connection to GQC which I understand is problematic on your side! But once connected, I check status and see something like so:
nsh> mavlink status instance #0: mavlink chan: #0 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 5257.3 B/s txerr: 0.0 B/s tx rate mult: 1.000 tx rate max: 46080 B/s rx: 0.0 B/s rx loss: 0.0% FTP enabled: YES, TX enabled: YES mode: Onboard MAVLink version: 1 transport protocol: serial (/dev/ttyS6 @921600) instance #1: GCS heartbeat valid mavlink chan: #1 type: USB CDC flow control: OFF rates: tx: 9076.7 B/s txerr: 0.0 B/s tx rate mult: 1.000 tx rate max: 100000 B/s rx: 46.9 B/s rx loss: 2.3% Received Messages: sysid:255, compid:190, Total: 89 (lost: 207) FTP enabled: YES, TX enabled: YES mode: Config MAVLink version: 2 transport protocol: serial (/dev/ttyACM0 @2000000) ping statistics: last: 0.61 ms mean: 8.47 ms max: 10432.52 ms min: 0.54 ms dropped packets: 10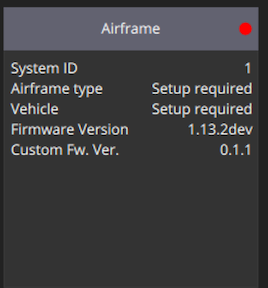
For the connector colors... supply chain issues have caused some sporadic usage... we like the color coded connectors but haven't been able to consistently source them!
For the MAG, we originally had it enabled in the 0.0.9 build. The feedback from our test team was for their use cases they preferred it off, but I think there's a way to start this up from the SD card via a file since it's not in the start up script. Otherwise, perhaps we just re-enable it.
-
OK I think we have a work around via SD card if you want to bootup the mag by default:
I took the SD card from FCv2 out and used a SD card reader and an Ubuntu machine:
travis@travis-18 / cd media/travis travis@travis-18 /media/travis ls 3266-3639 travis@travis-18 /media/travis cd 3266-3639 travis@travis-18 /media/travis/3266-3639 ls dataman log uavcan.db ufw travis@travis-18 /media/travis/3266-3639 mkdir etc travis@travis-18 /media/travis/3266-3639 cd etc travis@travis-18 /media/travis/3266-3639/etc echo "bmm150 -I start" > extras.txt travis@travis-18 /media/travis/3266-3639/etc cat extras.txt bmm150 -I startThen on bootup, the driver appears to run OK:
NuttShell (NSH) NuttX-11.0.0 nsh> bmm150 status INFO [SPI_I2C] Running on I2C Bus 4, Address 0x10 bmm150: reset: 1 events bmm150: bad register: 0 events bmm150: bad transfer: 0 events bmm150: overflow: 0 events bmm150: self test failed: 0 events nsh>And here's SD card:
nsh> ls /: bin/ dev/ etc/ fs/ obj/ proc/ nsh> ls fs/microsd/etc /fs/microsd/etc: extras.txtCalibration process was enabled after this as well:
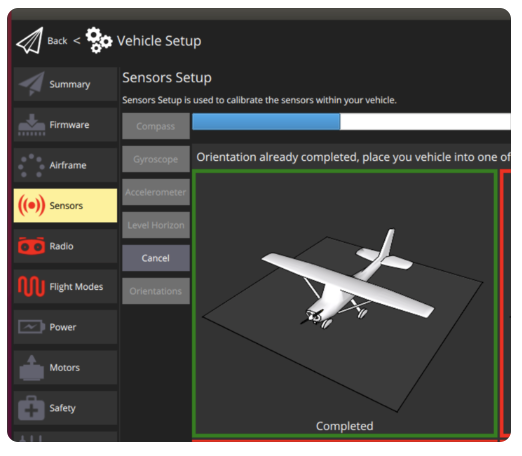
-
Hi @modaltb ,
Really appreciate your help on this! I figured the connectors were a red herring. And understand about the MAG, I get that not everyone wants to use it as they can be prone to interference when not separated. Thanks for the re-enabling script instructions!
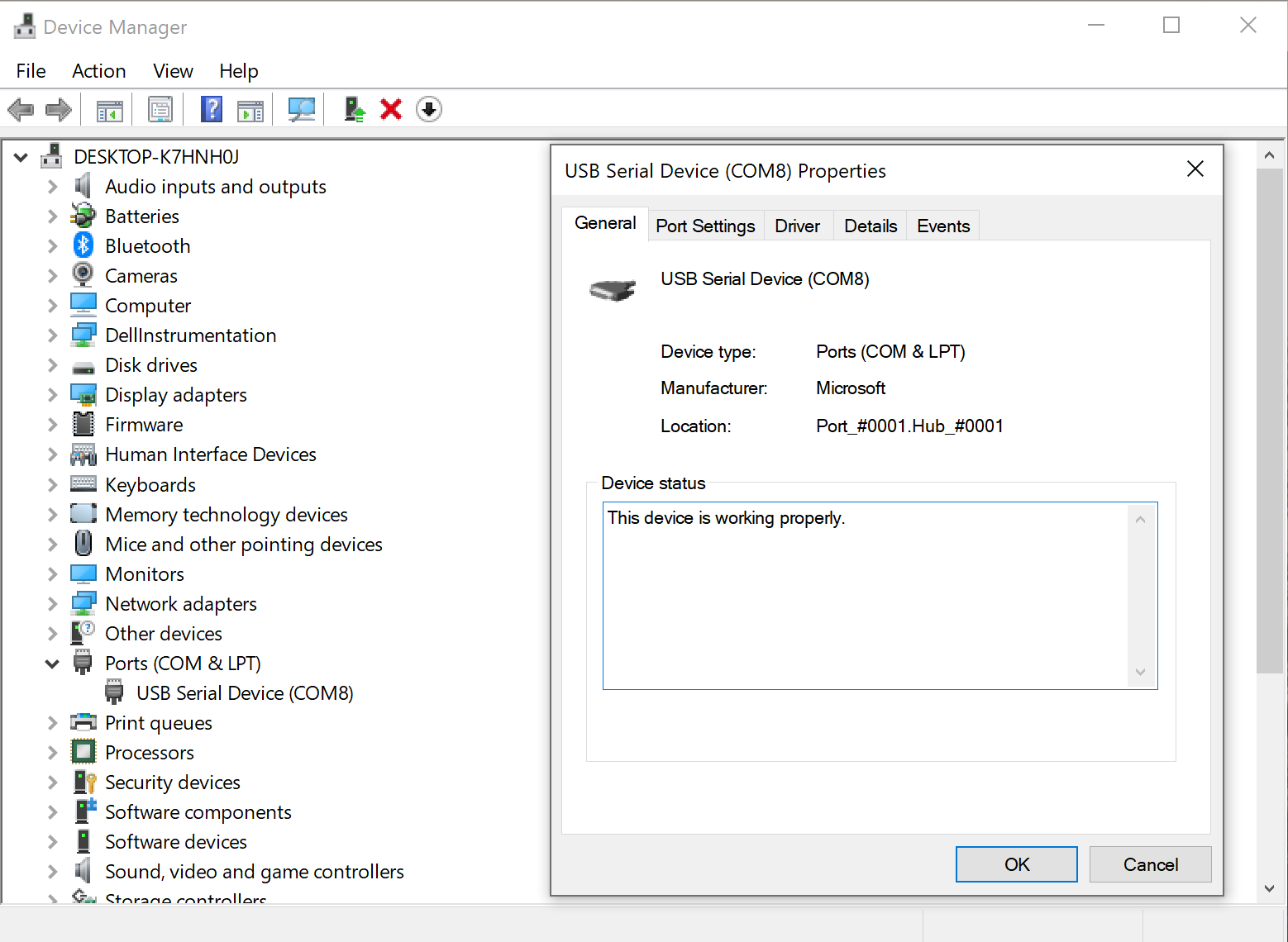
It looks like the connection is a Windows issue as that's how we do out setup (because that's how most of our clients access the drone in the field). It shows up normally as a COM port but for some reason QGC doesn't seem to be recognizing the FCv2 where it doesn't have issues with FCv1, VOXL Flight, or VOXL 2.
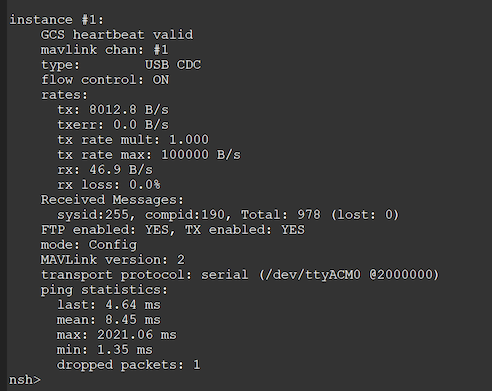
The status looks identical once the manual connection is established:
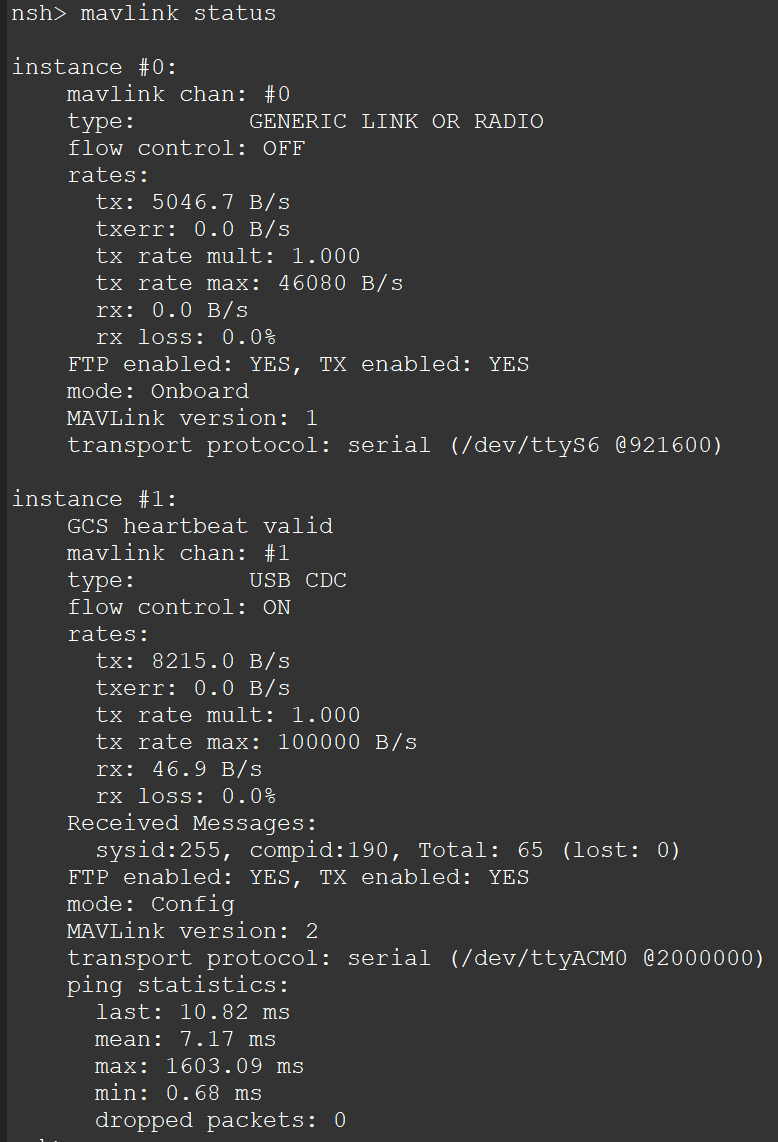
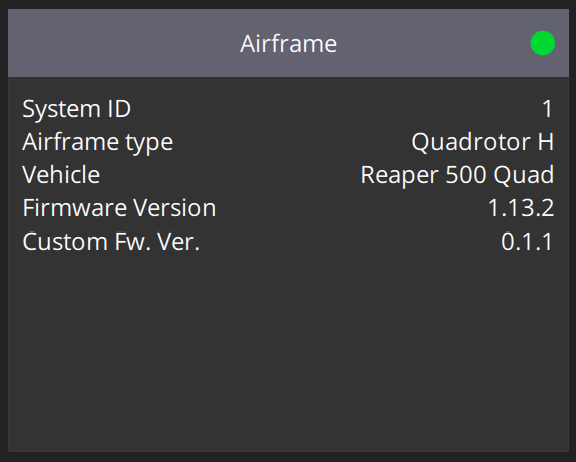
Airframe is also looking the same but without the dev of course:
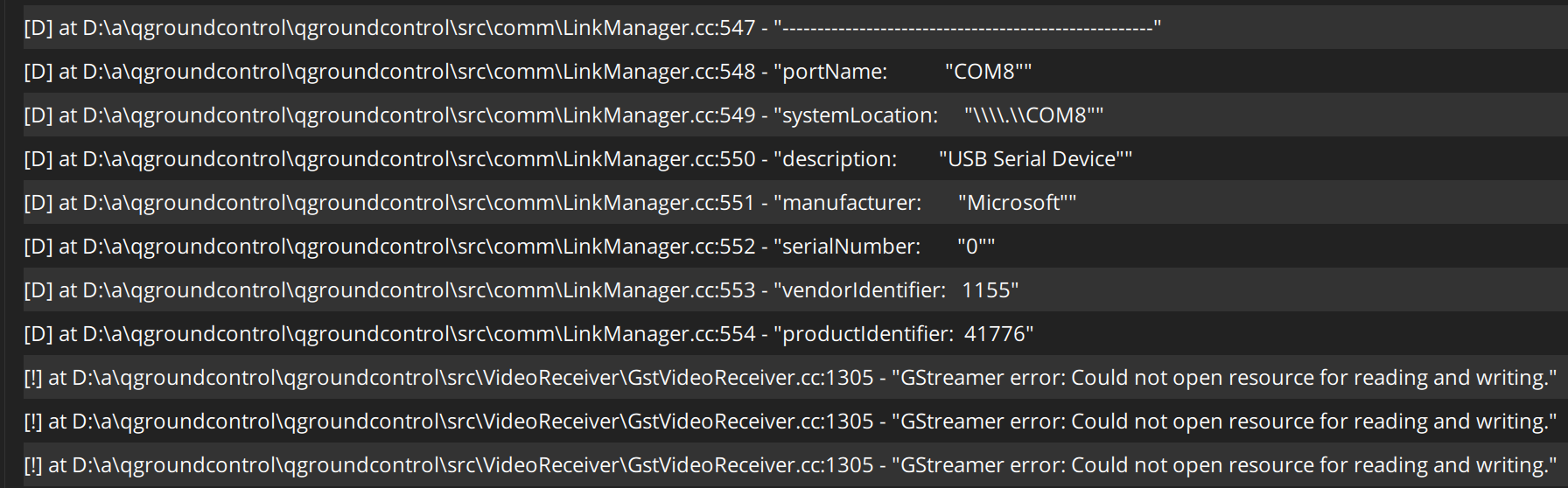
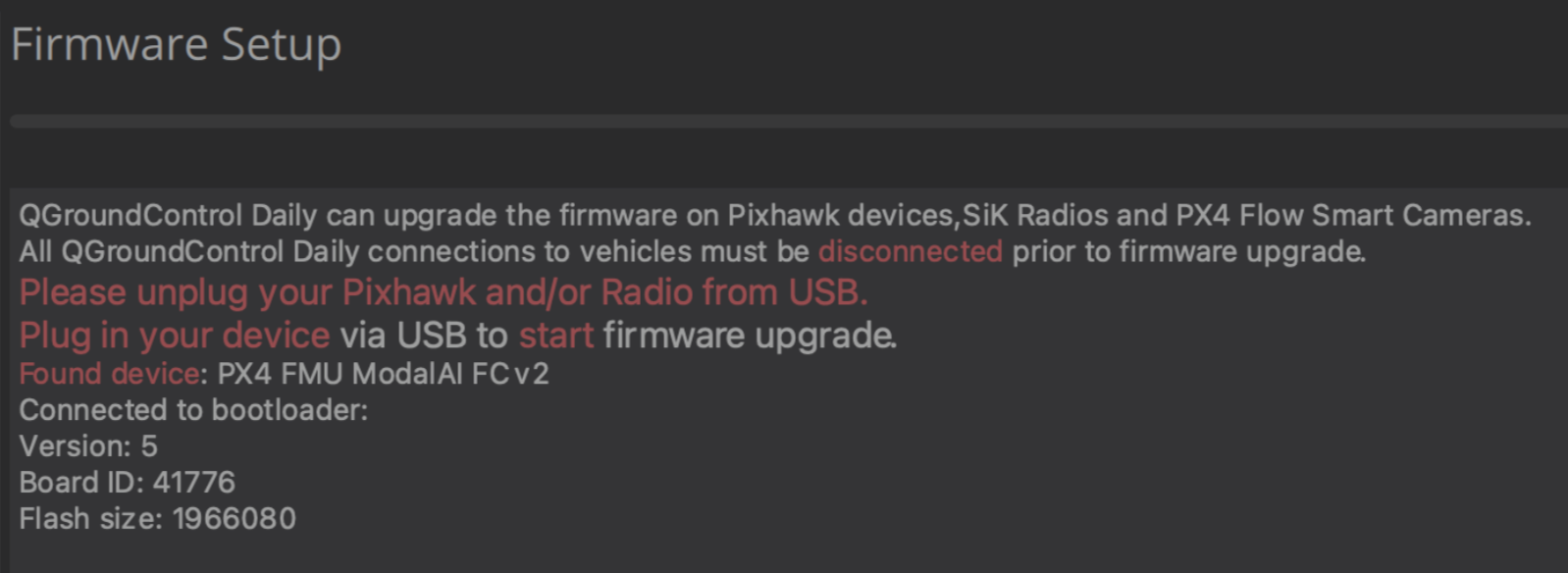
I also took a screenshot of the console in case that helps. This is where a link has NOT been established, so QGC clearly sees the device on the COM port but doesn't connect to it. The streamer error is because it's looking for streaming video (eg. a VOXL Flight setup) and none exists:
Could you try a Windows connection on your end and see if you get similar results with v1.13.2? We're getting the same thing on two different Windows computers we've tried on our end.
Still not sure why our firmware flashing seems to produce some buggy startup issues on the unit, we'll keep testing the firmware side tomorrow to make sure we didn't miss anything.
-
Thanks for the update and data! OK yes let me get a troubleshoot session going on a Windows machine and I'll get back to you!
-
Great, thanks!
We'll also try repeating everything on Mac instead of Linux to see if we can further troubleshoot on our end in case something weird is happening with our Linux build.
-
So we can confirm that the Windows USB driver is the main issue with the connection, it connected right away on QGC Mac. Looks like something's being buggy there.
We had a friend try installing the firmware via Mac instead of Linux just to test if something in our setup could be messing with the firmware, but couldn't get the bootloader to actually write the firmware and gave up after an hour of troubleshooting (that's the third engineer who's tried working on the problem from our end). We'll keep working at it on our side but we're running out of new computers to test things on.
Any thoughts on why our firmware seems to not be working correctly (e.g. attitude estimator not running on bootup)? Could there be a glitch we're running into on our machine during the firmware installation that would mess with that?
Will be good to see if you run into the same connection problem on Windows too.
-
Hi @Ansel-Misfeldt , yes I believe I've replicated this on Windows (10)..... I'm digging in!
-
@modaltb Awesome, glad you were able to replicate it! We'll keep working on the firmware on our end to see if something weird was happening with our firmware flashing.
Again, appreciate the help!
-
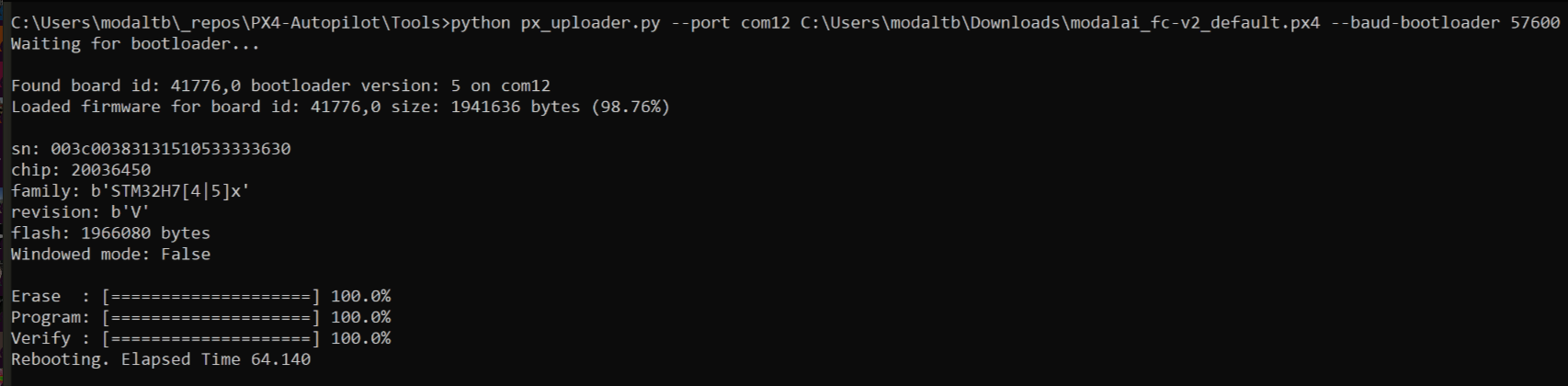
side data point: on Windows10 with python 3.11, after I installed pyserial, I can use px_uploader to flash FW successfully.
After we get USB working with QGC, I still FW update via QGC isn't going to work (perhaps) so wanted to make sure the work around is useable to get you guys flashing on Windows, so please use px_uploader.py to flash in short term
")
-
OK so I also replicated (after forgetting that you mentioned it!) that you can create the connection manually and things get connected.
Working through some QGC build errors on windows and will try to see why the 'auto connection' isn't working...
So two things we know:
- FW update has to be done via px_uploader.py tool (confirmed on my end to work on windows, ubuntu, OSX, after installing pyserial!!)
- QGC connection on Windows needs to be manually started with settings like above
-
Will try the Pyserial on Windows on our end to see if that fixes our firmware issue, which I suspect it might given everything works fine on your end. It's a super busy week for us so will try to verify that by EOW if possible! Let me know what you figure out on the auto-connect issue!
-
Hey @modaltb,
Wanted to follow up again on this thread as we managed to make some progress.
We've continued troubleshooting and can conclusively say that the firmware linked to on the https://docs.modalai.com/flight-core-v2-firmware/#v1132-px4-support page does not work when flashed on our units. We finally tried downgrading to an older version of the firmware in desperation and it worked just fine. On the linked FW version the attitude estimator doesn't start up correctly which renders the controller unusable for flight. Not sure why it worked for you when you installed that version of the firmware but we were able to replicate the behavior on two separate units in our possession. Is it possible it went unnoticed that the attitude estimator was broken when you tested it on your end?
Wanted to share that insight with you and ask if there's any progress or an ETA on getting the QGC auto connection on windows fixed?
Thanks!
-
Hi @Ansel-Misfeldt ,
I believe by default the attitude estimator isn't running because we had the internal mag disabled in our current production release, as our default setup is used in an M500 like vehicle with an external mag. Essentially we are shipping our setup that we use.
For example, if you set EKF2_MAG_TYPE to NONE and SYS_HAS_MAG to Disabled and reboot the flight controller, the attitude estimator will likely be running?
The other options are:
- use external mag
- use the SD card method above to start the internal mag to startup on default
- recompile our branch, enabling this line of code:
https://github.com/modalai/px4-firmware/blob/modalai-1.13.2/boards/modalai/fc-v2/init/rc.board_sensors#L25
and load the FW - rebuild off PX4 main, which has the mag enabled
As for the Windows connection issue, there's a work around currently so it's not deemed a show stopper at this point, and its in our tracking system to be looked at but I have not time frame unfortunately.
-
FW update feature is working in QGC daily build starting today, no change needed on flight core v2.
-
J jcroughan referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login