VOXL FPV ESC one motor not spinning
-
Hi,
I have the VOXL FPV ESC and I cannot spin/ calibrate one of the motors. 3 motors spin calibrate fine but one motor spins very intermittently. I tried replacing that motor but same behavior.
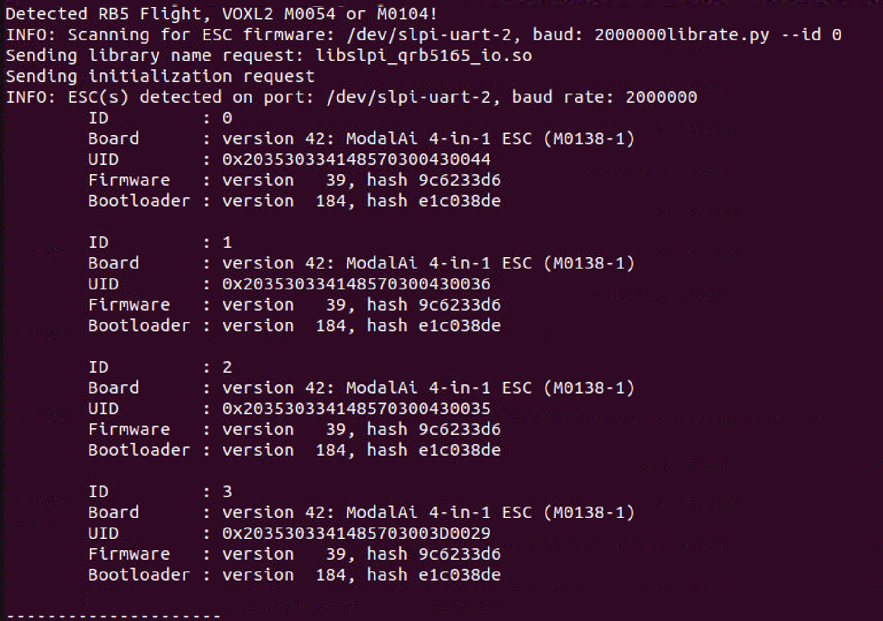
Screenshot of the ESC detection:
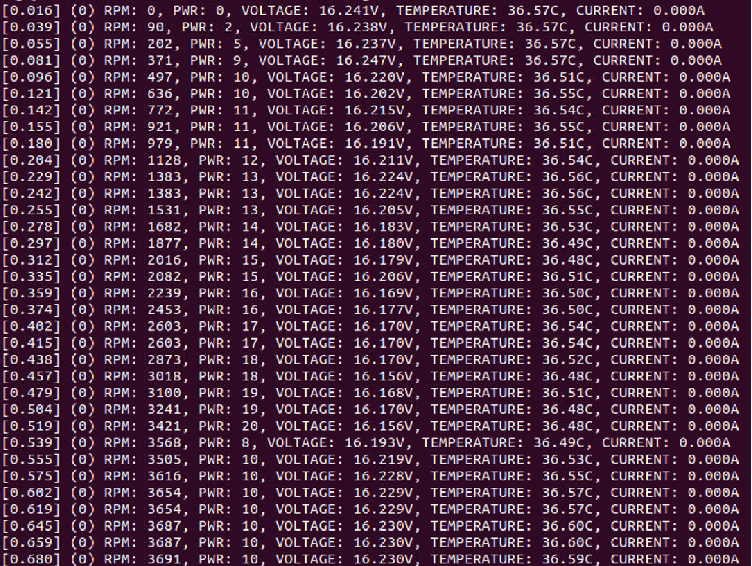
Good motor spin:
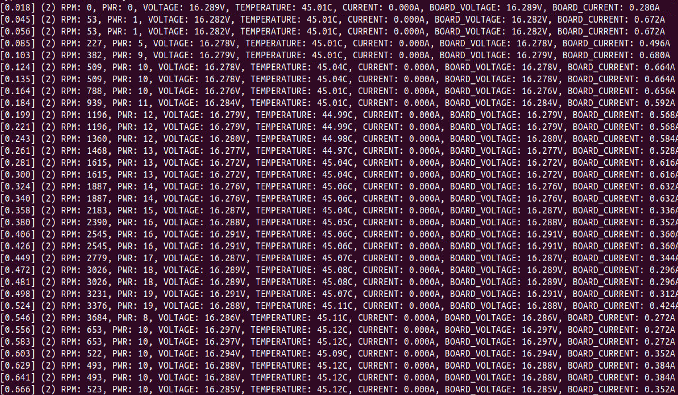
Bad motor spin:
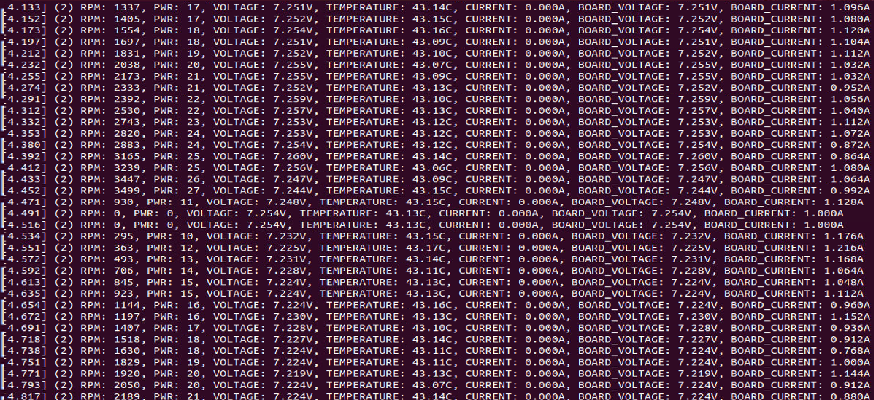
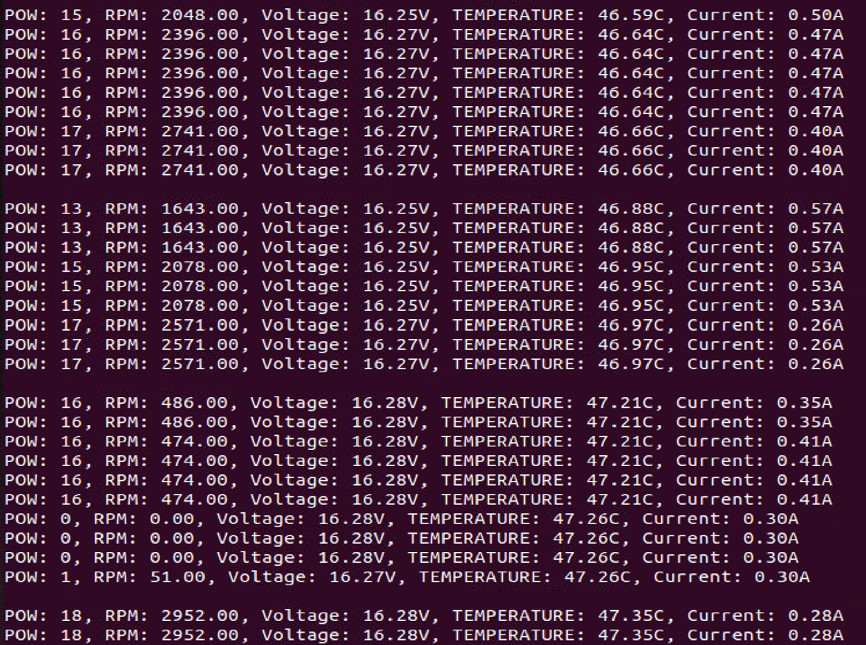
I think it is a bad ESC, but need your guidance if this can be fixed. The output when running this motor is different: it shows extra BOARD_VOLTAGE, and BOARD_CURRENT fields when spinning. Also it knows the RPM keeps going to zero.
-
Hi,
I have the VOXL FPV ESC and I cannot spin/ calibrate one of the motors. 3 motors spin calibrate fine but one motor spins very intermittently. I tried replacing that motor but same behavior.
Screenshot of the ESC detection:
Good motor spin:
Bad motor spin:
I think it is a bad ESC, but need your guidance if this can be fixed. The output when running this motor is different: it shows extra BOARD_VOLTAGE, and BOARD_CURRENT fields when spinning. Also it knows the RPM keeps going to zero.
Hi @qubotics-admin ,
Between the two tests, i see that one test shows 16V input voltage and the other test ~7.2V. Was the voltage applied to the ESC the same during the tests (and the ESC read it incorrectly) or the voltage was in fact different?
Such a big difference can have adverse affects on spin-up if the change in voltage is not accounted for in the esc tuning param file.
It is possible that if the ESC does not have correct parameters for your motor / propeller, the sinusoidal spinup does not have enough power and loses tracking during the spin-up phase and fails to transition to steady-state spin stage.
The ESC channel 2 on the FPV ESC is the only channel that measures the total board current, so that is why the printout is slightly different when you test the channel 2.
Please provide the following details that will help us figure out the issue:
- what voltage are you testing the ESC? 16V or 7V?
- what motor/propeller do you have and which ESC params are you using?
- does the "bad" ESC channel ever properly spin up, or it never spins up at any battery voltage?
- is this the first time you are using this motor + propeller + voltage combination with the FPV ESC , or it has been previously working reliably?
- have you performed any ESC parameter tuning using
voxl-esctools?
Alex
-
Hi @qubotics-admin ,
Between the two tests, i see that one test shows 16V input voltage and the other test ~7.2V. Was the voltage applied to the ESC the same during the tests (and the ESC read it incorrectly) or the voltage was in fact different?
Such a big difference can have adverse affects on spin-up if the change in voltage is not accounted for in the esc tuning param file.
It is possible that if the ESC does not have correct parameters for your motor / propeller, the sinusoidal spinup does not have enough power and loses tracking during the spin-up phase and fails to transition to steady-state spin stage.
The ESC channel 2 on the FPV ESC is the only channel that measures the total board current, so that is why the printout is slightly different when you test the channel 2.
Please provide the following details that will help us figure out the issue:
- what voltage are you testing the ESC? 16V or 7V?
- what motor/propeller do you have and which ESC params are you using?
- does the "bad" ESC channel ever properly spin up, or it never spins up at any battery voltage?
- is this the first time you are using this motor + propeller + voltage combination with the FPV ESC , or it has been previously working reliably?
- have you performed any ESC parameter tuning using
voxl-esctools?
Alex
@Alex-Kushleyev the tests were done all in succession with the same 4S (16V) battery. We are using Xing2 2205 2300kv motors with 5 inch props.
I followed the ESC calibration guide: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/master/voxl-esc-tools/calibration.md
I started with this parameter file: lumenier_2305_2400kv_GF_D90_4S.xml and modified it as follows:
param name="vbat_nominal_mv" value="15200"
param name="num_cycles_per_rev" value="7"
param name="min_rpm" value="3200"
param name="max_rpm" value="25000"Then I uploaded these, and did the calibration. I got good results initially, and all motors were spinning up fine.
param name="pwm_vs_rpm_curve_a0" value="29.00369359"
param name="pwm_vs_rpm_curve_a1" value="0.414700099"
param name="pwm_vs_rpm_curve_a2" value="3.58E-06"Nothing else was changed in the parameter file, and it was uploaded to the ESC.
But while the drone was on bench, after 2 or 3 times of running, the motor on ESC channel 2 stopped spinning. I tried re-calibrating but now even during the calibration that ESC channel does not spin up the motor.
-
@Alex-Kushleyev the tests were done all in succession with the same 4S (16V) battery. We are using Xing2 2205 2300kv motors with 5 inch props.
I followed the ESC calibration guide: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/master/voxl-esc-tools/calibration.md
I started with this parameter file: lumenier_2305_2400kv_GF_D90_4S.xml and modified it as follows:
param name="vbat_nominal_mv" value="15200"
param name="num_cycles_per_rev" value="7"
param name="min_rpm" value="3200"
param name="max_rpm" value="25000"Then I uploaded these, and did the calibration. I got good results initially, and all motors were spinning up fine.
param name="pwm_vs_rpm_curve_a0" value="29.00369359"
param name="pwm_vs_rpm_curve_a1" value="0.414700099"
param name="pwm_vs_rpm_curve_a2" value="3.58E-06"Nothing else was changed in the parameter file, and it was uploaded to the ESC.
But while the drone was on bench, after 2 or 3 times of running, the motor on ESC channel 2 stopped spinning. I tried re-calibrating but now even during the calibration that ESC channel does not spin up the motor.
I tried spinning the motor (ESC ch. 2) with a fresh battery at 10% power. Now it shows 16V but still the same behavior.
I tried recalibrating, but it doesn't spin properly during calibration. Also, the end parameters are way off than the original ones (which are the same on the other 3 motors).
-
I tried spinning the motor (ESC ch. 2) with a fresh battery at 10% power. Now it shows 16V but still the same behavior.
I tried recalibrating, but it doesn't spin properly during calibration. Also, the end parameters are way off than the original ones (which are the same on the other 3 motors).
Hi @qubotics-admin , a few comments:
- you don't need to re-calibrate per motor -- one time calibration for the motor / propeller time is sufficient
- make sure to update the correct kV value in the spinup params. although it probably is not the issue here since your motor is 2300kV and the params you started with are for 2400kv, but it's good to make it right. This param affect the spinup procedure.
Questions:
- the the motor connected to ID2 spin at all during the initial spin-up procedure? are you able to share a video?
- if you extend the spinup from 0.5s to 1.0 second, does the same issue persist?
- if you increase the spinup power a bit (i think it may be set to 100 right now (10%), make it 120 and test again? If the current spinup power is not 100 -- whatever it is now, increase by 20% for a test and see if that helps (change it back after the test if there is no improvement).
- note that if the motor does spin up, it is important to note the rpm at a specific commanded power and compare that rpm to other motors. Sometimes it is possible for a motor to spin even with a partially shorted windings or an issue in the ESC, but it would spin slower than normal, especially under load (with propeller attached).
- i know you said that swapping the motor did not help, but it would be good to test the motor that is not spinning now on ID2 by switching this motor to another ESC ID and making sure it spins ok.
Also,
- please make sure that the windings of the motor are not damaged by the motor mounting screws. this is a common issue when the motor mounting screws are too long and they penetrate into the windings, creating a partial short
- if you have a milliohm meter, the winding resistance can be verified (it should be the same for any pairwise test of any phases for all motors of the same type -- within a few percent)
- inspect the ESC for any debris or any other objects touching the ESC board
Alex
-
Hi @qubotics-admin , a few comments:
- you don't need to re-calibrate per motor -- one time calibration for the motor / propeller time is sufficient
- make sure to update the correct kV value in the spinup params. although it probably is not the issue here since your motor is 2300kV and the params you started with are for 2400kv, but it's good to make it right. This param affect the spinup procedure.
Questions:
- the the motor connected to ID2 spin at all during the initial spin-up procedure? are you able to share a video?
- if you extend the spinup from 0.5s to 1.0 second, does the same issue persist?
- if you increase the spinup power a bit (i think it may be set to 100 right now (10%), make it 120 and test again? If the current spinup power is not 100 -- whatever it is now, increase by 20% for a test and see if that helps (change it back after the test if there is no improvement).
- note that if the motor does spin up, it is important to note the rpm at a specific commanded power and compare that rpm to other motors. Sometimes it is possible for a motor to spin even with a partially shorted windings or an issue in the ESC, but it would spin slower than normal, especially under load (with propeller attached).
- i know you said that swapping the motor did not help, but it would be good to test the motor that is not spinning now on ID2 by switching this motor to another ESC ID and making sure it spins ok.
Also,
- please make sure that the windings of the motor are not damaged by the motor mounting screws. this is a common issue when the motor mounting screws are too long and they penetrate into the windings, creating a partial short
- if you have a milliohm meter, the winding resistance can be verified (it should be the same for any pairwise test of any phases for all motors of the same type -- within a few percent)
- inspect the ESC for any debris or any other objects touching the ESC board
Alex
- I updated the correct kV and uploaded the params to the ESC.
- I increased the spin-up time from 0.5s to 1s; and spin-up power from 90 to 110 and then to 120. There was a bit of improvement but still the motor spins very intermittently. Previously, it would just barely move and stop.
- I swapped motors on ESC channel 1 (good channel) and ESC channel 2 (bad channel). So the motor working nicely on channel 1 stopped working when moved to channel 2. And the motor that was not working on channel 2, worked fine when moved to channel 1. So it is definitely not the motor (or short in winding).
- We have made sure the ESC is free of any debris and not touching anything.
Is there a good way to share video? I can share a folder with you if you give me an email pls.
Thanks.
Regards. -
- I updated the correct kV and uploaded the params to the ESC.
- I increased the spin-up time from 0.5s to 1s; and spin-up power from 90 to 110 and then to 120. There was a bit of improvement but still the motor spins very intermittently. Previously, it would just barely move and stop.
- I swapped motors on ESC channel 1 (good channel) and ESC channel 2 (bad channel). So the motor working nicely on channel 1 stopped working when moved to channel 2. And the motor that was not working on channel 2, worked fine when moved to channel 1. So it is definitely not the motor (or short in winding).
- We have made sure the ESC is free of any debris and not touching anything.
Is there a good way to share video? I can share a folder with you if you give me an email pls.
Thanks.
Regards.@qubotics-admin , thanks for doing the motor swap test. From this result, it does appear that one of the ESC channels is not working properly. We would like to take a look at the ESC - are you able to send it back for inspection? We can send you a replacement ESC in return.
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login