Lumenier RID & M10Q GPS Module compatibility
-
@Eric-Katzfey Thanks for the information on the magnetometer. We have integrated a different magnetometer and it seems to work. We will work on building the original mag into the image.
For the GPS, I just did what you suggested and here is the output.
@Alex-May And can you post the entire output from
voxl-px4 -d? -
@Alex-May And can you post the entire output from
voxl-px4 -d?_| / / |_/
px4 starting.
INFO [parameters] Starting param sync THREAD
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
AIRFRAME: MULTICOPTER
GPS: AUTODETECT
RC: CRSF_RAW
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
AIRSPEED SENSOR: NONE
DISTANCE SENSOR: NONE
OSD: DISABLE
ARTIFACT_MODE: DISABLE
EXTRA STEPS:
INFO [muorb] [parameters] Starting param sync THREAD
Running on M0104
INFO [muorb] [qshell] before starting the qshell_entry task
INFO [muorb] [tasks] Creating pthread qshell
INFO [muorb] [qshell] qshell entry.....
INFO [muorb] [tasks] Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] [qshell] Init app map initialized
INFO [muorb] [qshell] after starting the qshell_entry task
INFO [param] selected parameter default file /data/px4/param/parameters
INFO [muorb] [uORB] Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] [uORB] Advertising remote topic parameter_update
INFO [muorb] [uORB] Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_t
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] [uORB] Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_t
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 3260 bytes, decoded 3260 bytes (INT32:49, FLOAT:104)
Starting IMU driver with rotation 12
INFO [qshell] Send cmd: 'icm42688p start -s -R 12'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: icm42688p start -s -R 12
INFO [muorb] [qshell] arg0 = 'icm42688p'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-s'
INFO [muorb] [qshell] arg3 = '-R'
INFO [muorb] [qshell] arg4 = '12'
INFO [muorb] [drivers__device] *** SPI Device ID 0x26000a 2490378
INFO [uORB] Advertising remote topic sensor_accel
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] [icm42688p] ICM42688P::probe successful!
INFO [muorb] [drivers__device] on SPI bus 1
INFO [muorb] icm42688p #0 on SPI bus 1
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601298
INFO [muorb] rotation 12
INFO [muorb]INFO [muorb] [qshell] Ok executing command: icm42688p start -s -R 12
INFO [uORB] Advertising remote topic qshell_retval
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601298
INFO [qshell] qshell return value timestamp: 211374557, local time: 211377002
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601298
INFO [muorb] [drivers__device] Register interrupt b214ec48 e61ebf5c b2601298
INFO [uORB] Advertising remote topic sensor_gyro_fifo
INFO [uORB] Advertising remote topic sensor_accel_fifo
INFO [uORB] Advertising remote topic imu_server
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: icp101xx start -I -b 5
INFO [muorb] [qshell] arg0 = 'icp101xx'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-I'
INFO [muorb] [qshell] arg3 = '-b'
INFO [muorb] [qshell] arg4 = '5'
INFO [muorb] [drivers__device] *** I2C Device ID 0xb76329 12018473
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 5
INFO [muorb] icp101xx #0 on I2C bus 5
INFO [muorb] address 0x63
INFO [muorb]INFO [muorb] [qshell] Ok executing command: icp101xx start -I -b 5
INFO [qshell] qshell return value timestamp: 211427777, local time: 211431619
INFO [qshell] Send cmd: 'temperature_compensation start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: temperature_compensation start
INFO [muorb] [qshell] arg0 = 'temperature_compensation'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic sensor_correction
INFO [muorb] [qshell] Ok executing command: temperature_compensation start
INFO [qshell] qshell return value timestamp: 211467706, local time: 211471033
Looking for qmc5883l magnetometer
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601298
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: qmc5883l start -R 10 -X -b 1
INFO [muorb] [qshell] arg0 = 'qmc5883l'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '10'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0x80d09 527625
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
INFO [muorb] qmc5883l #0 on I2C bus 1
INFO [muorb] (external)
INFO [muorb] address 0xD
INFO [muorb] rotation 10
INFO [muorb]INFO [muorb] [qshell] Ok executing command: qmc5883l start -R 10 -X -b 1
INFO [qshell] qshell return value timestamp: 211508749, local time: 211510033
Looking for ist8310 magnetometer
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ist8310 start -R 10 -X -b 1
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
INFO [muorb] [qshell] arg0 = 'ist8310'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '10'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0x60e09 396809
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: ist8310 start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 211536822, local time: 211541301
ERROR [qshell] Command failed
Looking for ist8308 magnetometer
INFO [qshell] Send cmd: 'ist8308 start -R 12 -X -b 1'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ist8308 start -R 12 -X -b 1
INFO [muorb] [qshell] arg0 = 'ist8308'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '12'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0xb0c09 723977
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: ist8308 start -R 12 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 211592767, local time: 211594905
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: gps start
INFO [muorb] [qshell] arg0 = 'gps'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [tasks] Creating pthread gps
INFO [muorb] [tasks] Successfully created px4 task PX4_gps with tid 2097647
INFO [muorb] [qshell] Ok executing command: gps start
INFO [qshell] qshell return value timestamp: 211620958, local time: 211622253
Looking for ncp5623c RGB LED
INFO [uORB] Advertising remote topic sensor_mag
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [muorb] [qshell] arg0 = 'rgbled_ncp5623c'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-X'
INFO [muorb] [qshell] arg3 = '-b'
INFO [muorb] [qshell] arg4 = '1'
INFO [muorb] [qshell] arg5 = '-f'
INFO [muorb] [qshell] arg6 = '400'
INFO [uORB] Advertising remote topic sensor_baro
INFO [muorb] [qshell] arg7 = '-a'
INFO [muorb] [qshell] arg8 = '56'
INFO [muorb] [drivers__device] *** I2C Device ID 0x7b3809 8075273
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
INFO [muorb] [drivers__device] Set i2c address 0x38, fd 4
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 211659904, local time: 211662135
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [qshell] Send cmd: 'voxl_esc start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: voxl_esc start
INFO [muorb] [qshell] arg0 = 'voxl_esc'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [muorb] [voxl_esc] Starting VOXL ESC driver
INFO [muorb] [voxl_esc] Params: VOXL_ESC_CONFIG: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_MODE: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_BAUD: 250000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC1: 104
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC2: 101
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC3: 103
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC4: 102
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR1: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR2: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR3: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR4: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_RPM_MIN: 1500
INFO [muorb] [voxl_esc] Params: VOXL_ESC_RPM_MAX: 12000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_PERC: 90
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_DEAD: 20
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_EXPO: 35
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_MINF: 0.150000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_COSP: 0.990000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_VLOG: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_PUB_BST: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_WARN: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_OVER: 0
INFO [muorb] [voxl_esc] Params: GPIO_CTL_CH: 0
INFO [muorb] [qshell] Ok executing command: voxl_esc start
INFO [muorb] [voxl_esc] Opening UART ESC device 2, baud rate 250000
INFO [muorb] [voxl_esc] Successfully opened UART ESC device
INFO [muorb] [voxl_esc] Detecting ESCs...
INFO [muorb] [voxl_esc] ESC ID : 0
INFO [muorb] [voxl_esc] Board Type : 42: ModalAi 4-in-1 ESC (M0138-1)
INFO [muorb] [voxl_esc] Unique ID : 0x2030303355465715004A0021
INFO [qshell] qshell return value timestamp: 211799981, local time: 211806814
INFO [muorb] [voxl_esc] Firmware : version 39, hash e4f576a0
INFO [muorb] [voxl_esc] Bootloader : version 184, hash e1c038de
INFO [muorb] [voxl_esc] Reply time : 2538us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 1
INFO [muorb] [voxl_esc] Board Type : 42: ModalAi 4-in-1 ESC (M0138-1)
INFO [muorb] [voxl_esc] Unique ID : 0x2030303355465715003B001E
INFO [muorb] [voxl_esc] Firmware : version 39, hash e4f576a0
INFO [muorb] [voxl_esc] Bootloader : version 184, hash e1c038de
INFO [muorb] [voxl_esc] Reply time : 3147us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 2
Starting CRSF RC driver
INFO [muorb] [voxl_esc] Board Type : 42: ModalAi 4-in-1 ESC (M0138-1)
INFO [muorb] [voxl_esc] Unique ID : 0x20303033554657150048001F
INFO [muorb] [voxl_esc] Firmware : version 39, hash e4f576a0
INFO [muorb] [voxl_esc] Bootloader : version 184, hash e1c038de
INFO [muorb] [voxl_esc] Reply time : 3800us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 3
INFO [muorb] [voxl_esc] Board Type : 42: ModalAi 4-in-1 ESC (M0138-1)
INFO [muorb] [voxl_esc] Unique ID : 0x2030303355465715002E0020
INFO [muorb] [voxl_esc] Firmware : version 39, hash e4f576a0
INFO [muorb] [voxl_esc] Bootloader : version 184, hash e1c038de
INFO [muorb] [voxl_esc] Reply time : 3141us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] Use extened rpm packet : 1
INFO [muorb] [voxl_esc] All ESCs successfully detected
INFO [qshell] Send cmd: 'crsf_rc start -d 7'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: crsf_rc start -d 7
INFO [muorb] [qshell] arg0 = 'crsf_rc'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-d'
INFO [muorb] [qshell] arg3 = '7'
INFO [muorb] [qshell] Ok executing command: crsf_rc start -d 7
INFO [muorb] [crsf_rc] Crsf serial opened sucessfully
INFO [muorb] [crsf_rc] Crsf serial is single wire. Telemetry disabled
INFO [uORB] Advertising remote topic input_rc
INFO [qshell] qshell return value timestamp: 211853575, local time: 211856609
INFO [uORB] Advertising remote topic actuator_outputs_debug
INFO [uORB] Advertising remote topic esc_status
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: voxlpm start -X -b 2
INFO [muorb] [qshell] arg0 = 'voxlpm'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-X'
INFO [muorb] [qshell] arg3 = '-b'
INFO [muorb] [qshell] arg4 = '2'
INFO [muorb] [drivers__device] *** I2C Device ID 0xd24411 13779985
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 2
INFO [muorb] [drivers__device] Set i2c address 0x6a, fd 5
INFO [muorb] [drivers__device] Set i2c address 0x44, fd 5
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: voxlpm start -X -b 2
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 211911245, local time: 211914428
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'sensors start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: sensors start
INFO [muorb] [qshell] arg0 = 'sensors'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic sensor_selection
INFO [uORB] Advertising remote topic sensors_status_imu
INFO [uORB] Advertising remote topic vehicle_acceleration
INFO [uORB] Advertising remote topic vehicle_angular_velocity
INFO [uORB] Advertising remote topic sensor_combined
INFO [uORB] Advertising remote topic battery_status
INFO [uORB] Advertising remote topic vehicle_air_data
INFO [uORB] Advertising remote topic vehicle_gps_position
INFO [uORB] Advertising remote topic vehicle_magnetometer
INFO [uORB] Advertising remote topic sensor_preflight_mag
INFO [uORB] Advertising remote topic sensors_status_mag
INFO [uORB] Advertising remote topic vehicle_imu
INFO [uORB] Advertising remote topic vehicle_imu_status
INFO [muorb] [qshell] Ok executing command: sensors start
INFO [qshell] qshell return value timestamp: 212095544, local time: 212100016
INFO [uORB] Advertising remote topic sensors_status_baro
INFO [qshell] Send cmd: 'ekf2 start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ekf2 start
INFO [muorb] [qshell] arg0 = 'ekf2'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_attitude
INFO [uORB] Advertising remote topic vehicle_local_position
INFO [uORB] Advertising remote topic estimator_event_flags
INFO [uORB] Advertising remote topic estimator_innovation_test_ratios
INFO [uORB] Advertising remote topic estimator_innovation_variances
INFO [uORB] Advertising remote topic estimator_innovations
INFO [uORB] Advertising remote topic estimator_sensor_bias
INFO [uORB] Advertising remote topic estimator_states
INFO [uORB] Advertising remote topic estimator_status_flags
INFO [uORB] Advertising remote topic estimator_status
INFO [muorb] [qshell] Ok executing command: ekf2 start
INFO [uORB] Advertising remote topic ekf2_timestamps
INFO [uORB] Advertising remote topic vehicle_odometry
INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos
INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_mag_heading
INFO [uORB] Advertising remote topic estimator_aid_src_mag
INFO [uORB] Advertising remote topic estimator_aid_src_gravity
INFO [qshell] qshell return value timestamp: 212264482, local time: 212270715
INFO [qshell] Send cmd: 'mc_pos_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_pos_control start
INFO [muorb] [qshell] arg0 = 'mc_pos_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic takeoff_status
INFO [muorb] [qshell] Ok executing command: mc_pos_control start
INFO [qshell] qshell return value timestamp: 212351878, local time: 212353666
INFO [qshell] Send cmd: 'mc_att_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_att_control start
INFO [muorb] [qshell] arg0 = 'mc_att_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt
INFO [muorb] [qshell] Ok executing command: mc_att_control start
INFO [qshell] qshell return value timestamp: 212387868, local time: 212389654
INFO [qshell] Send cmd: 'mc_rate_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_rate_control start
INFO [muorb] [qshell] arg0 = 'mc_rate_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic rate_ctrl_status
INFO [muorb] [qshell] Ok executing command: mc_rate_control start
INFO [qshell] qshell return value timestamp: 212448566, local time: 212452284
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_hover_thrust_estimator start
INFO [muorb] [qshell] arg0 = 'mc_hover_thrust_estimator'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: mc_hover_thrust_estimator start
INFO [qshell] qshell return value timestamp: 212509852, local time: 212513050
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_autotune_attitude_control start
INFO [muorb] [qshell] arg0 = 'mc_autotune_attitude_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic autotune_attitude_control_status
INFO [muorb] [qshell] Ok executing command: mc_autotune_attitude_control start
INFO [qshell] qshell return value timestamp: 212547374, local time: 212549706
INFO [qshell] Send cmd: 'land_detector start multicopter'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: land_detector start multicopter
INFO [muorb] [qshell] arg0 = 'land_detector'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = 'multicopter'
INFO [muorb] [qshell] Ok executing command: land_detector start multicopter
INFO [qshell] qshell return value timestamp: 212585335, local time: 212585998
INFO [uORB] Advertising remote topic vehicle_land_detected
INFO [qshell] Send cmd: 'manual_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: manual_control start
INFO [muorb] [qshell] arg0 = 'manual_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: manual_control start
INFO [uORB] Advertising remote topic manual_control_setpoint
INFO [qshell] qshell return value timestamp: 212623416, local time: 212626408
INFO [qshell] Send cmd: 'control_allocator start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: control_allocator start
INFO [muorb] [qshell] arg0 = 'control_allocator'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic control_allocator_status
INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_motors
INFO [uORB] Advertising remote topic actuator_servos
INFO [uORB] Advertising remote topic actuator_servos_trim
INFO [muorb] [qshell] Ok executing command: control_allocator start
INFO [qshell] qshell return value timestamp: 212776930, local time: 212779497
INFO [qshell] Send cmd: 'load_mon start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: load_mon start
INFO [muorb] [qshell] arg0 = 'load_mon'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: load_mon start
INFO [uORB] Advertising remote topic cpuload
INFO [qshell] qshell return value timestamp: 212826033, local time: 212827740
INFO [qshell] Send cmd: 'rc_update start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: rc_update start
INFO [muorb] [qshell] arg0 = 'rc_update'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: rc_update start
INFO [uORB] Advertising remote topic rc_channels
INFO [qshell] qshell return value timestamp: 212954650, local time: 212958731
INFO [qshell] Send cmd: 'commander start'
INFO [muorb] [ekf2] resetQuatStateYaw called: -0.968698 (0.090000)INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: commander start
INFO [muorb] [qshell] arg0 = 'commander'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [tasks] Creating pthread commander
INFO [muorb] [tasks] Successfully created px4 task PX4_commander with tid 2097640
INFO [uORB] Advertising remote topic led_control
INFO [muorb] [commander] LED: open /dev/led0 failed (22)
INFO [muorb] [qshell] Ok executing command: commander start
INFO [uORB] Advertising remote topic tune_control
INFO [qshell] qshell return value timestamp: 213091743, local time: 213094449
INFO [uORB] Advertising remote topic event
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [qshell] Send cmd: 'flight_mode_manager start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: flight_mode_manager start
INFO [muorb] [qshell] arg0 = 'flight_mode_manager'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] [qshell] Ok executing command: flight_mode_manager start
INFO [qshell] qshell return value timestamp: 213156797, local time: 213159088
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] [uORB] Advertising remote topic transponder_report
INFO [muorb] [uORB] Advertising remote topic rtl_time_estimate
INFO [muorb] [uORB] Advertising remote topic position_setpoint_triplet
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] [uORB] Advertising remote topic telemetry_status
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] [uORB] Advertising remote topic offboard_control_mode
INFO [muorb] [uORB] Advertising remote topic obstacle_distance
INFO [muorb] [uORB] Advertising remote topic timesync_status
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] [uORB] Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [logger] logger started (mode=all)
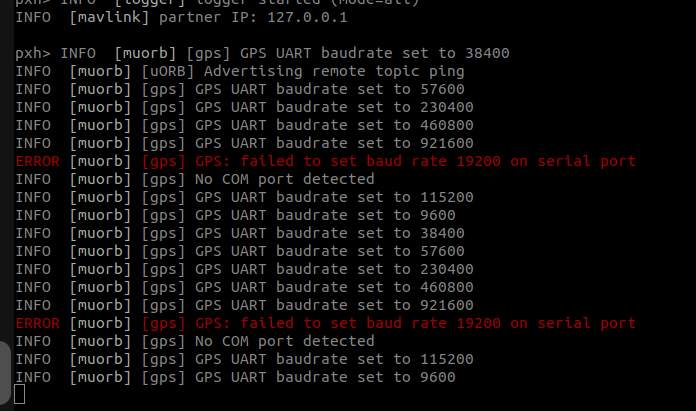
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [uORB] Advertising remote topic ping
INFO [muorb] [gps] GPS UART baudrate set to 57600
INFO [muorb] [gps] GPS UART baudrate set to 230400
INFO [muorb] [gps] GPS UART baudrate set to 460800
INFO [muorb] [gps] GPS UART baudrate set to 921600
ERROR [muorb] [gps] GPS: failed to set baud rate 19200 on serial port
INFO [uORB] Advertising remote topic mavlink_log
INFO [muorb] [health_and_arming_checks] Preflight Fail: Strong magnetic interference
INFO [muorb] [health_and_arming_checks] Preflight Fail: Yaw estimate error
INFO [muorb] [gps] No COM port detected
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [gps] GPS UART baudrate set to 57600
INFO [muorb] [gps] GPS UART baudrate set to 230400
INFO [muorb] [gps] GPS UART baudrate set to 460800
INFO [muorb] [gps] GPS UART baudrate set to 921600
ERROR [muorb] [gps] GPS: failed to set baud rate 19200 on serial port
INFO [muorb] [gps] No COM port detected
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [gps] GPS UART baudrate set to 57600
INFO [muorb] [gps] GPS UART baudrate set to 230400
INFO [muorb] [gps] GPS UART baudrate set to 460800
INFO [muorb] [gps] GPS UART baudrate set to 921600 -
@Alex-May It really looks like there is no communication going on between the GPS and the VOXL 2. Can you attach an oscilloscope to the rx and tx lines to look for activity? Usually the M10 units come up and start sending NMEA strings at 9600 so you would be able to detect that on the scope.
@Eric-Katzfey I don't believe we have a scope available for at least a few more days. But I do have other M10 GPS units I could try.
-
@Eric-Katzfey I am Alex's co-worker and helping with the building the magnetometer's driver into PX4.
I am following instructions outlined here: https://gitlab.com/voxl-public/rb5-flight/rb5-flight-px4-build-docker#install-qualcomm-package-manager
I am having hard time downloading the hexagon SDK from qualcomm. I see v3.1 is available on your website. Am I going to need 4.X or I can use 3.1
-
@Eric-Katzfey I am Alex's co-worker and helping with the building the magnetometer's driver into PX4.
I am following instructions outlined here: https://gitlab.com/voxl-public/rb5-flight/rb5-flight-px4-build-docker#install-qualcomm-package-manager
I am having hard time downloading the hexagon SDK from qualcomm. I see v3.1 is available on your website. Am I going to need 4.X or I can use 3.1
@psafi Yes, unfortunately it is a real pain to get the SDK from Qualcomm and you need that version.
-
@Alex-May The driver for that magnetometer has not been built into the image so it won't work without adding that driver. As for GPS it seems like it isn't communicating with the receiver. Can you run this experiment: Stop PX4 with
systemctl stop voxl-px4, wait a couple of seconds, then start px4 from the command line withvoxl-px4 -dand post the output from that? -
@psafi Yes, unfortunately it is a real pain to get the SDK from Qualcomm and you need that version.
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
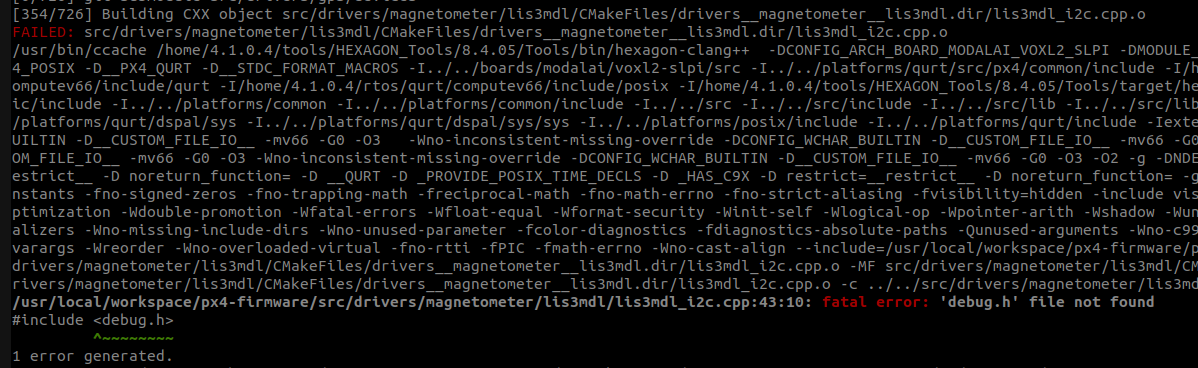
-
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
@psafi Looks like it will compile if you comment out the
#include <debug.h>lines in both lis3mdl_i2c.cpp and lis3mdl_spi.cpp -
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
@psafi Those should only be there on the Nuttx platform.
-
@psafi Looks like it will compile if you comment out the
#include <debug.h>lines in both lis3mdl_i2c.cpp and lis3mdl_spi.cpp@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
-
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi If you disable the px4 service (
systemctl stop voxl-px4) and then start it from the command line (voxl-px4 -d) what output do you get? And if you disconnect the magnetometer from the system how does that change things? Remove the start command from voxl-px4-start and enter it after px4 starts from the command prompt to see what happens. -
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi And how did you load your updated build to the VOXL 2?
-
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi I just built voxl-px4 with the lis3mdl driver and when I run it the command fails because it fails the probe (I don't have that magnetometer) but otherwise runs normally.
-
@psafi And how did you load your updated build to the VOXL 2?
@Eric-Katzfey by installing debian package and I got output similar to this after installation:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-px4#deployment -
@psafi If you disable the px4 service (
systemctl stop voxl-px4) and then start it from the command line (voxl-px4 -d) what output do you get? And if you disconnect the magnetometer from the system how does that change things? Remove the start command from voxl-px4-start and enter it after px4 starts from the command prompt to see what happens.@Eric-Katzfey I did the systemctl stop and started service again. I guess rebooting the board earlier did not have the same effect. The compass calibration in Q is working now (no more "no mag found" error) which I guess it means the mag is working now and our gps is working too.
here is the output of voxl-p4 -d by the way:
INFO [qshell] Send cmd: 'lis3mdl start -R 10 -X -b 1' INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] [qshell] qshell gotten: lis3mdl start -R 10 -X -b 1 INFO [muorb] [qshell] arg0 = 'lis3mdl' INFO [muorb] [qshell] arg1 = 'start' INFO [muorb] [qshell] arg2 = '-R' INFO [muorb] [qshell] arg3 = '10' INFO [muorb] [qshell] arg4 = '-X' INFO [muorb] [qshell] arg5 = '-b' INFO [muorb] [qshell] arg6 = '1' INFO [muorb] [drivers__device] *** I2C Device ID 0x51e09 335369 INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1 INFO [muorb] lis3mdl #0 on I2C bus 1 INFO [muorb] (external) INFO [muorb] address 0x1E INFO [muorb] rotation 10 INFO [muorb] INFO [muorb] [qshell] Ok executing command: lis3mdl start -R 10 -X -b 1
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login