Hires cam not working with voxl2
-
I'm using a VOXL 2 flight controller with an M0173 Starling 2 Front End. The setup includes tracking camera, PMD TOF and a high-resolution (hires) IMX412 camera. While the tracking cameras and TOF are detected and functioning, I'm unable to get any response from the hires camera.
I have tried reconnnecting camera again and reinstalled SDK. and downgraded to SDK 1.4.0.
when I connected them first it worked properly and I havr disconnected the cable and connected again , it is not showing at all. I have checked reconnecting the cable properly multiple times. I even tried swapping Tracking cable to Hires but no use.
Error I have got from voxl-camera-server
fsync_en: 1 fsync_gpio: 109 ================================================================= thread is locked to cores: 4 5 6 7 connected to mavlink pipe Connected to cpu-monitor Starting Camera: tracking_front (id #0) gbm_create_device(156): Info: backend name is: msm_drm MISP Initializing!!! Detected 1 platform(s) Detected 1 GPU device(s) Starting Camera: hires (id #1) ERROR: Camera 1 failed to find supported stream config: 1024x768 WARNING: Failed to start cam hires due to invalid resolution WARNING: assuming cam is missing and trying to compensate Starting Camera: tof (originally id #2) with id offset: 1 Starting Camera: tracking_down (originally id #3) with id offset: 1 WARNING: cam tracking_down (id 2) does not seem to be alive ------ voxl-camera-server: Started 2 of 4 cameras ------ voxl-camera-server: Camera server is now runningplease suggest me any fixes for this.
My SKU is :
family code: MCCA-M0054 (voxl2-board-only)
compute board: 4 (voxl2)
hw version: 1
cam config: 26
modem config: ()
tx config: ()
extras config: ()
SKU: MCCA-M0054-C26-T0-M0-X0this is my voxl-camera-server.config file
cat /etc/modalai/voxl-camera-server.conf /** * voxl-camera-server Configuration File * * Each camera has configurations for up to 4 HAL3 streams: * - `preview` stream for raw unprocessed images from CV cameras * - `small_video` 720p (ish) h264/h265 compressed for fpv video streaming * - `large_video` 4k (ish) h264/h265 for onboard video recording to disk * - `snapshot` ISP-processed JPG snapshots that get saved to disk * * on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled * * This file is generated from default values by voxl-configure-cameras. * Do not expect arbitrary resolutions to work, the ISP and video compression * pipelines only support very specific resolutions. * * The default video compression mode is cqp or Constant Quantization Parameter * * * */ { "version": 0.1, "fsync_en": true, "fsync_gpio": 109, "cameras": [{ "type": "ar0144", "name": "tracking_front", "enabled": true, "camera_id": 0, "fps": 30, "en_rotate": true, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }, { "type": "imx412", "name": "hires", "enabled": true, "camera_id": 1, "fps": 30, "en_preview": false, "preview_width": 640, "preview_height": 480, "en_raw_preview": false, "en_small_video": true, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": true, "large_video_width": 4056, "large_video_height": 3040, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": true, "en_snapshot_width": 4056, "en_snapshot_height": 3040, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "ae_mode": "isp", "gain_min": 54, "gain_max": 8000 }, { "type": "pmd-tof-liow2", "name": "tof", "enabled": true, "camera_id": 2, "fps": 10, "en_rotate": true, "ae_mode": "off", "gain_min": 0, "gain_max": 0, "exposure_max_us": 6000, "standby_enabled": false, "decimator": 5 }, { "type": "ar0144", "name": "tracking_down", "enabled": true, "camera_id": 3, "fps": 30, "en_rotate": false, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }] } -
I'm using a VOXL 2 flight controller with an M0173 Starling 2 Front End. The setup includes tracking camera, PMD TOF and a high-resolution (hires) IMX412 camera. While the tracking cameras and TOF are detected and functioning, I'm unable to get any response from the hires camera.
I have tried reconnnecting camera again and reinstalled SDK. and downgraded to SDK 1.4.0.
when I connected them first it worked properly and I havr disconnected the cable and connected again , it is not showing at all. I have checked reconnecting the cable properly multiple times. I even tried swapping Tracking cable to Hires but no use.
Error I have got from voxl-camera-server
fsync_en: 1 fsync_gpio: 109 ================================================================= thread is locked to cores: 4 5 6 7 connected to mavlink pipe Connected to cpu-monitor Starting Camera: tracking_front (id #0) gbm_create_device(156): Info: backend name is: msm_drm MISP Initializing!!! Detected 1 platform(s) Detected 1 GPU device(s) Starting Camera: hires (id #1) ERROR: Camera 1 failed to find supported stream config: 1024x768 WARNING: Failed to start cam hires due to invalid resolution WARNING: assuming cam is missing and trying to compensate Starting Camera: tof (originally id #2) with id offset: 1 Starting Camera: tracking_down (originally id #3) with id offset: 1 WARNING: cam tracking_down (id 2) does not seem to be alive ------ voxl-camera-server: Started 2 of 4 cameras ------ voxl-camera-server: Camera server is now runningplease suggest me any fixes for this.
My SKU is :
family code: MCCA-M0054 (voxl2-board-only)
compute board: 4 (voxl2)
hw version: 1
cam config: 26
modem config: ()
tx config: ()
extras config: ()
SKU: MCCA-M0054-C26-T0-M0-X0this is my voxl-camera-server.config file
cat /etc/modalai/voxl-camera-server.conf /** * voxl-camera-server Configuration File * * Each camera has configurations for up to 4 HAL3 streams: * - `preview` stream for raw unprocessed images from CV cameras * - `small_video` 720p (ish) h264/h265 compressed for fpv video streaming * - `large_video` 4k (ish) h264/h265 for onboard video recording to disk * - `snapshot` ISP-processed JPG snapshots that get saved to disk * * on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled * * This file is generated from default values by voxl-configure-cameras. * Do not expect arbitrary resolutions to work, the ISP and video compression * pipelines only support very specific resolutions. * * The default video compression mode is cqp or Constant Quantization Parameter * * * */ { "version": 0.1, "fsync_en": true, "fsync_gpio": 109, "cameras": [{ "type": "ar0144", "name": "tracking_front", "enabled": true, "camera_id": 0, "fps": 30, "en_rotate": true, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }, { "type": "imx412", "name": "hires", "enabled": true, "camera_id": 1, "fps": 30, "en_preview": false, "preview_width": 640, "preview_height": 480, "en_raw_preview": false, "en_small_video": true, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": true, "large_video_width": 4056, "large_video_height": 3040, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": true, "en_snapshot_width": 4056, "en_snapshot_height": 3040, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "ae_mode": "isp", "gain_min": 54, "gain_max": 8000 }, { "type": "pmd-tof-liow2", "name": "tof", "enabled": true, "camera_id": 2, "fps": 10, "en_rotate": true, "ae_mode": "off", "gain_min": 0, "gain_max": 0, "exposure_max_us": 6000, "standby_enabled": false, "decimator": 5 }, { "type": "ar0144", "name": "tracking_down", "enabled": true, "camera_id": 3, "fps": 30, "en_rotate": false, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }] }@voxl-phoenix , if you use VOXL2 with the M0173 camera front-end, when you install the VOXL2 SDK, you need to select the option 2, which enables M0173:
PLEASE SELECT WHICH KERNEL TO FLASH
- M0054-1 -> QRB5165M, Starling (D0005), Sentinel (D0006), FPV (D0008), D0010, PX4 Dev Kit (D0011)
- M0054-1 -> QRB5165M w/ M0173 Camera Breakout Board, Starling 2 Max (D0012), Starling 2 (D0014)
The reason for this is the M0173 has different mapping of various GPIO that controls camera functions (including on/off). The camera GPIO control is done from the Kernel, so that is why a different kernel needs to be loaded if you use M0173.
If you don't want to re-install the whole SDK, you can update the kernel manually:
Test the new kernel without overwriting (will not persist after reboot):
adb reboot bootloader fastboot boot m0054-1-var00.1-kernel.imgThen you can adb into the board and do a quick test to see if all cameras are detected :
voxl-camera-server -lwill print at the top all detected cameras (in your case should be 4 cameras).To permanently flash the new kernel:
adb reboot bootloader fastboot flash boot_a m0054-1-var00.1-kernel.img fastboot flash boot_b m0054-1-var00.1-kernel.img fastboot reboot(in order to flash the standard kernel, use
m0054-1-var00.0-kernel.img)In order to check which kernel variant you are currently running:
voxl2:/$ voxl-version | grep mach mach.var: 1.0.0 # this is the default kernel, not for use with M0173or
voxl2:/$ voxl-version | grep mach mach.var: 1.0.1 # this is the kernel for use with M0173If you are using M0154 (not M0054), It uses the same kernel as M0054, and will be detected as such.
Hopefully this solves your issue.
-
@Alex-Kushleyev Thank you for the advise , I have been using the kernal image which includes M0173 breakout board.
voxl2:~$ voxl-camera-server -l existing instance of voxl-camera-server found, attempting to stop it DEBUG: Attempting to open the hal module DEBUG: SUCCESS: Camera module opened on attempt 0 DEBUG: ----------- Number of cameras: 2 DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356 DEBUG: Cam idx: 1, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975 DEBUG: Note: This list comes from the HAL module and may not be indicative DEBUG: of configurations that have full pipelines DEBUG: Number of cameras: 2 ==================================== Stats for camera: 0 ANDROID_SCALER_AVAILABLE_RAW_SIZES: These are likely supported by the sensor 1280 x 800 1280 x 800 ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS: These are NOT necessarily supported by the sensor 1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 800 HAL_PIXEL_FORMAT_BLOB 1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 768 HAL_PIXEL_FORMAT_BLOB 1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 720 HAL_PIXEL_FORMAT_BLOB 1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888 1024 x 738 HAL_PIXEL_FORMAT_BLOB 1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888 1024 x 768 HAL_PIXEL_FORMAT_BLOB 864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 864 x 480 HAL_PIXEL_FORMAT_BLOB 800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888 800 x 600 HAL_PIXEL_FORMAT_BLOB 800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 800 x 480 HAL_PIXEL_FORMAT_BLOB 720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 720 x 480 HAL_PIXEL_FORMAT_BLOB 640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 512 HAL_PIXEL_FORMAT_BLOB 640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 480 HAL_PIXEL_FORMAT_BLOB 640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 400 HAL_PIXEL_FORMAT_BLOB 640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 360 HAL_PIXEL_FORMAT_BLOB 352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888 352 x 288 HAL_PIXEL_FORMAT_BLOB 320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888 320 x 240 HAL_PIXEL_FORMAT_BLOB 240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888 240 x 320 HAL_PIXEL_FORMAT_BLOB 176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888 176 x 144 HAL_PIXEL_FORMAT_BLOB 1280 x 800 HAL_PIXEL_FORMAT_RAW10 1280 x 800 HAL_PIXEL_FORMAT_RAW12 1280 x 800 HAL_PIXEL_FORMAT_RAW16 1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUE ANDROID_SENSOR_INFO_SENSITIVITY_RANGE min = 54 max = 1596 ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY 1596 ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE min = 0ns max = 1318629735ns ==================================== Stats for camera: 1 ANDROID_SCALER_AVAILABLE_RAW_SIZES: These are likely supported by the sensor 240 x 1629 ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS: These are NOT necessarily supported by the sensor 240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888 240 x 320 HAL_PIXEL_FORMAT_BLOB 176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888 176 x 144 HAL_PIXEL_FORMAT_BLOB 240 x 1629 HAL_PIXEL_FORMAT_RAW10 240 x 1629 HAL_PIXEL_FORMAT_RAW12 240 x 1629 HAL_PIXEL_FORMAT_RAW16 240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUE ANDROID_SENSOR_INFO_SENSITIVITY_RANGE min = 54 max = 0 ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY 0 ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE min = 0ns max = 0ns ==================================== Number of cameras detected: 2 ==================================== voxl2:~$ voxl-version | grep mach mach.var: 1.0.1 voxl2:~$I have TOF, tracking and Hires connected to the board it worked fine as soon as connected for first time than I can see no response from Hires but Tracking and TOF are working properly.
-
@Alex-Kushleyev Thank you for the advise , I have been using the kernal image which includes M0173 breakout board.
voxl2:~$ voxl-camera-server -l existing instance of voxl-camera-server found, attempting to stop it DEBUG: Attempting to open the hal module DEBUG: SUCCESS: Camera module opened on attempt 0 DEBUG: ----------- Number of cameras: 2 DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356 DEBUG: Cam idx: 1, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975 DEBUG: Note: This list comes from the HAL module and may not be indicative DEBUG: of configurations that have full pipelines DEBUG: Number of cameras: 2 ==================================== Stats for camera: 0 ANDROID_SCALER_AVAILABLE_RAW_SIZES: These are likely supported by the sensor 1280 x 800 1280 x 800 ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS: These are NOT necessarily supported by the sensor 1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 800 HAL_PIXEL_FORMAT_BLOB 1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 768 HAL_PIXEL_FORMAT_BLOB 1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888 1280 x 720 HAL_PIXEL_FORMAT_BLOB 1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888 1024 x 738 HAL_PIXEL_FORMAT_BLOB 1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888 1024 x 768 HAL_PIXEL_FORMAT_BLOB 864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 864 x 480 HAL_PIXEL_FORMAT_BLOB 800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888 800 x 600 HAL_PIXEL_FORMAT_BLOB 800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 800 x 480 HAL_PIXEL_FORMAT_BLOB 720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 720 x 480 HAL_PIXEL_FORMAT_BLOB 640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 512 HAL_PIXEL_FORMAT_BLOB 640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 480 HAL_PIXEL_FORMAT_BLOB 640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 400 HAL_PIXEL_FORMAT_BLOB 640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888 640 x 360 HAL_PIXEL_FORMAT_BLOB 352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888 352 x 288 HAL_PIXEL_FORMAT_BLOB 320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888 320 x 240 HAL_PIXEL_FORMAT_BLOB 240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888 240 x 320 HAL_PIXEL_FORMAT_BLOB 176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888 176 x 144 HAL_PIXEL_FORMAT_BLOB 1280 x 800 HAL_PIXEL_FORMAT_RAW10 1280 x 800 HAL_PIXEL_FORMAT_RAW12 1280 x 800 HAL_PIXEL_FORMAT_RAW16 1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUE ANDROID_SENSOR_INFO_SENSITIVITY_RANGE min = 54 max = 1596 ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY 1596 ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE min = 0ns max = 1318629735ns ==================================== Stats for camera: 1 ANDROID_SCALER_AVAILABLE_RAW_SIZES: These are likely supported by the sensor 240 x 1629 ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS: These are NOT necessarily supported by the sensor 240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888 240 x 320 HAL_PIXEL_FORMAT_BLOB 176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888 176 x 144 HAL_PIXEL_FORMAT_BLOB 240 x 1629 HAL_PIXEL_FORMAT_RAW10 240 x 1629 HAL_PIXEL_FORMAT_RAW12 240 x 1629 HAL_PIXEL_FORMAT_RAW16 240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUE ANDROID_SENSOR_INFO_SENSITIVITY_RANGE min = 54 max = 0 ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY 0 ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE min = 0ns max = 0ns ==================================== Number of cameras detected: 2 ==================================== voxl2:~$ voxl-version | grep mach mach.var: 1.0.1 voxl2:~$I have TOF, tracking and Hires connected to the board it worked fine as soon as connected for first time than I can see no response from Hires but Tracking and TOF are working properly.
@voxl-phoenix please make sure the cameras are connected as shown in C26 configuration https://docs.modalai.com/voxl2-coax-camera-bundles/
-
@voxl-phoenix please make sure the cameras are connected as shown in C26 configuration https://docs.modalai.com/voxl2-coax-camera-bundles/
@Alex-Kushleyev
Yeah I did follow the exact camera connections given on C26 configuration except that I don't have a down tracking camera. everything else is same. It's weird that it worked at start and than no response at all. -
@Alex-Kushleyev
Yeah I did follow the exact camera connections given on C26 configuration except that I don't have a down tracking camera. everything else is same. It's weird that it worked at start and than no response at all.Can you please list
/usr/lib/camera/*sensormodule* -
Can you please list
/usr/lib/camera/*sensormodule*sorry for the trouble, but I can't get my head around why this is happening,
voxl2:~$ ls /usr/lib/camera/*sensormodule* /usr/lib/camera/com.qti.sensormodule.ar0144_combo_0.bin /usr/lib/camera/com.qti.sensormodule.ar0144_combo_6.bin /usr/lib/camera/com.qti.sensormodule.imx412_fpv_1.bin /usr/lib/camera/com.qti.sensormodule.irs2975c_3.bin voxl2:~$is there any chance my SDK installation might be corrupt. I have tried using 1.4.1 and 1.4.0.
-
sorry for the trouble, but I can't get my head around why this is happening,
voxl2:~$ ls /usr/lib/camera/*sensormodule* /usr/lib/camera/com.qti.sensormodule.ar0144_combo_0.bin /usr/lib/camera/com.qti.sensormodule.ar0144_combo_6.bin /usr/lib/camera/com.qti.sensormodule.imx412_fpv_1.bin /usr/lib/camera/com.qti.sensormodule.irs2975c_3.bin voxl2:~$is there any chance my SDK installation might be corrupt. I have tried using 1.4.1 and 1.4.0.
@voxl-phoenix , can you please confirm something - did you mention that this exact hardware setup was previously working with 4 cameras and now two cameras are no longer detected?
Regarding camera calibration, it seems the issue is that the calibrator is attempting to calibrate extrinsics (which is only done for a stereo camera setup), but you are only calibrating one camera. Let me look into that.
Alex
-
@voxl-phoenix , can you please confirm something - did you mention that this exact hardware setup was previously working with 4 cameras and now two cameras are no longer detected?
Regarding camera calibration, it seems the issue is that the calibrator is attempting to calibrate extrinsics (which is only done for a stereo camera setup), but you are only calibrating one camera. Let me look into that.
Alex
@Alex-Kushleyev I have only three cameras one TOF, Tracking, Hires each. TOF and Tracking are working properly.
for calibration I',m just calibrating Tracking camera with fish eye
voxl-calibrate-cameras -f -s 8x5 -l 0.029it is trying to calibrate extrinsics automatically.
-
@Alex-Kushleyev I have only three cameras one TOF, Tracking, Hires each. TOF and Tracking are working properly.
for calibration I',m just calibrating Tracking camera with fish eye
voxl-calibrate-cameras -f -s 8x5 -l 0.029it is trying to calibrate extrinsics automatically.
Ohh, sorry for the confusion. I misread your original post and thought that you have 4 cameras connected, like C26 configuration.
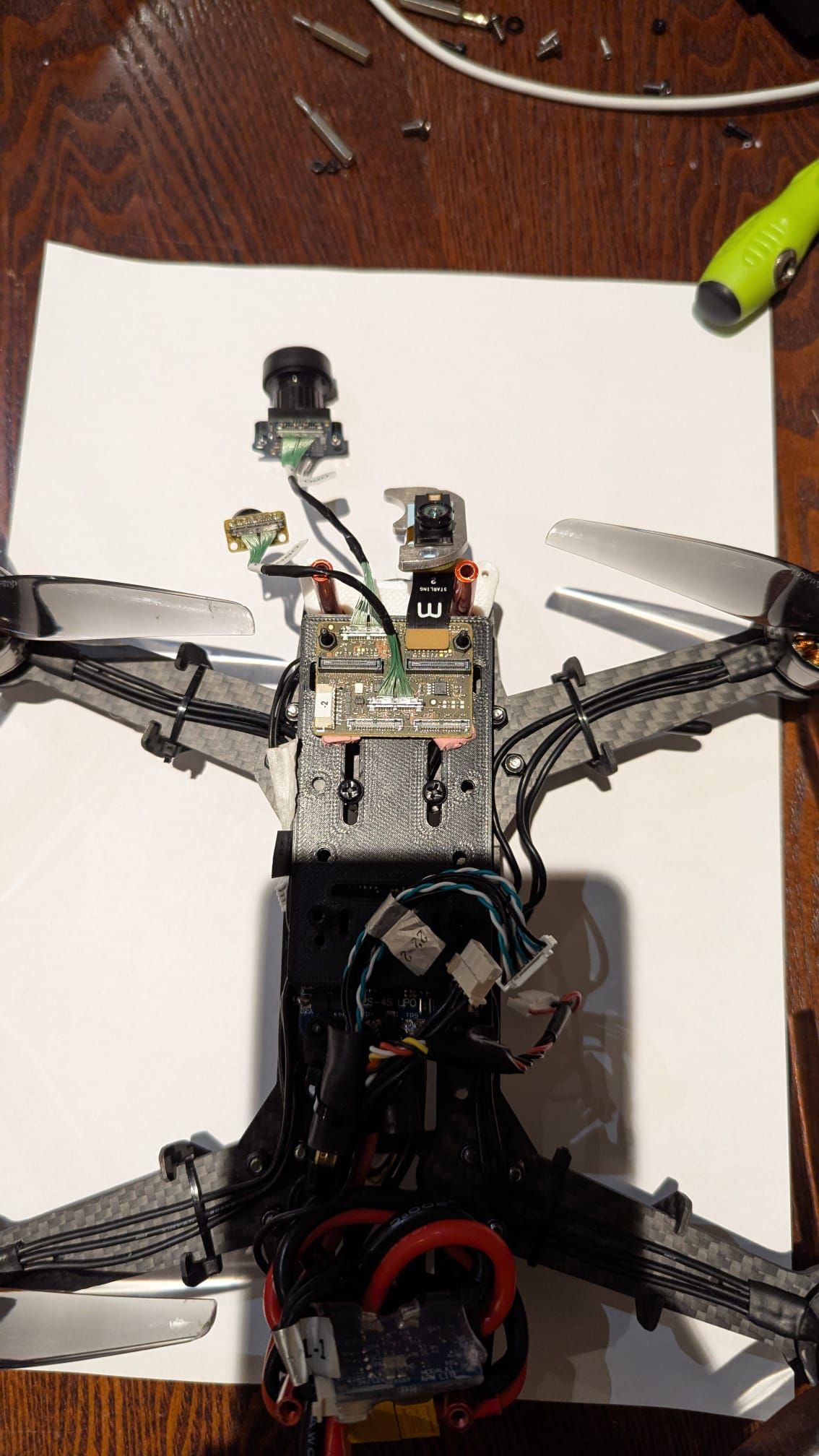
Can you please disconnect your M0173 from VOXL2 and take a picture showing the connectors on M0173 and where each camera is connected? just to double check.
Alex
-
Ohh, sorry for the confusion. I misread your original post and thought that you have 4 cameras connected, like C26 configuration.
Can you please disconnect your M0173 from VOXL2 and take a picture showing the connectors on M0173 and where each camera is connected? just to double check.
Alex
Thank you @Alex-Kushleyev
This is the output from my voxl-inspect-cam -a| Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |lt | tof_conf | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tof_depth | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tof_ir | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tracking_front | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_bayer | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_misp_grey | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_misp_norm | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8This is the output when I run voxl-camera-server.
voxl-camera-server existing instance of voxl-camera-server found, attempting to stop it MISP awb str: auto Setting MISP AWB to Autodetected system image 1.8.2 using new imx412 defaults MISP awb str: auto Setting MISP AWB to Auto================================================================= configuration for 4 cameras: cam #0 name: tracking_front sensor type: ar0144 isEnabled: 1 camId: 0 camId2: -1 fps: 30 en_rotate: 1 en_rotate2: 0 en_preview: 1 pre_width: 1280 pre_height: 800 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 1 misp_width: 1280 misp_height: 800 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: lme_msv msv_exposure_min_us: 20 msv_exposure_max_us: 12000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 cam #1 name: hires sensor type: imx412 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4056 large_video_height: 3040 en_misp: 0 misp_width: -1 misp_height: -1 en_snapshot: 1 snap_width: 4056 snap_height: 3040 exif_focal_length: 3.100000 exif_focal_len_35mm_format:17 exif_fnumber: 1.240000 ae_mode: isp msv_exposure_min_us: 20 msv_exposure_max_us: 33000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tof sensor type: pmd-tof-liow2 isEnabled: 1 camId: 2 camId2: -1 fps: 10 en_rotate: 1 en_rotate2: 0 en_preview: 1 pre_width: 240 pre_height: 1629 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 0 misp_width: -1 misp_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: off msv_exposure_min_us: 0 msv_exposure_max_us: 6000 gain_min : 0 gain_max : 0 standby_enabled: 0 decimator: 5 independent_exposure:0 cam #3 name: tracking_down sensor type: ar0144 isEnabled: 1 camId: 3 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 1280 pre_height: 800 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 1 misp_width: 1280 misp_height: 800 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: lme_msv msv_exposure_min_us: 20 msv_exposure_max_us: 12000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 fsync_en: 1 fsync_gpio: 109 ================================================================= thread is locked to cores: 4 5 6 7 connected to mavlink pipe Connected to cpu-monitor Starting Camera: tracking_front (id #0) gbm_create_device(156): Info: backend name is: msm_drm MISP Initializing!!! Detected 1 platform(s) Detected 1 GPU device(s) Starting Camera: hires (id #1) ERROR: Camera 1 failed to find supported stream config: 1024x768 WARNING: Failed to start cam hires due to invalid resolution WARNING: assuming cam is missing and trying to compensate Starting Camera: tof (originally id #2) with id offset: 1 Starting Camera: tracking_down (originally id #3) with id offset: 1 WARNING: cam tracking_down (id 2) does not seem to be alive ------ voxl-camera-server: Started 2 of 4 cameras ------ voxl-camera-server: Camera server is now running camera tracking_front frame size: 1024000 (1540096 alloc).. raw bpp: 8 WARNING: [ROYALE_WARNING] {ROYALE_FRAME_DROP}: Dropped 10223 frame(s). WARNING: [ROYALE_WARNING] {ROYALE_RAW_FRAME_STATS}: Raw frame drop stats: Bridge 10223 frames dropped, FC 0 frames dropped, 9 frames delivered. WARNING: [ROYALE_WARNING] {ROYALE_FRAME_DROP}: Dropped 9 frame(s). WARNING: [ROYALE_WARNING] {ROYALE_RAW_FRAME_STATS}: Raw frame drop stats: Bridge 9 frames dropped, FC 0 frames dropped, 81 frames delivered. ^C received SIGINT Ctrl-C ------ voxl-camera-server: Camera server is now stopping WARNING: Deleting buffers: 6 of 16 still in use WARNING: Deleting buffers: 6 of 16 still in use ------ voxl-camera-server: Camera server exited gracefully, returning 0this is my voxl sdk info
voxl2:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0054-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0.1 -------------------------------------------------------------------------------- voxl-suite: 1.4.3 -------------------------------------------------------------------------------- Packages: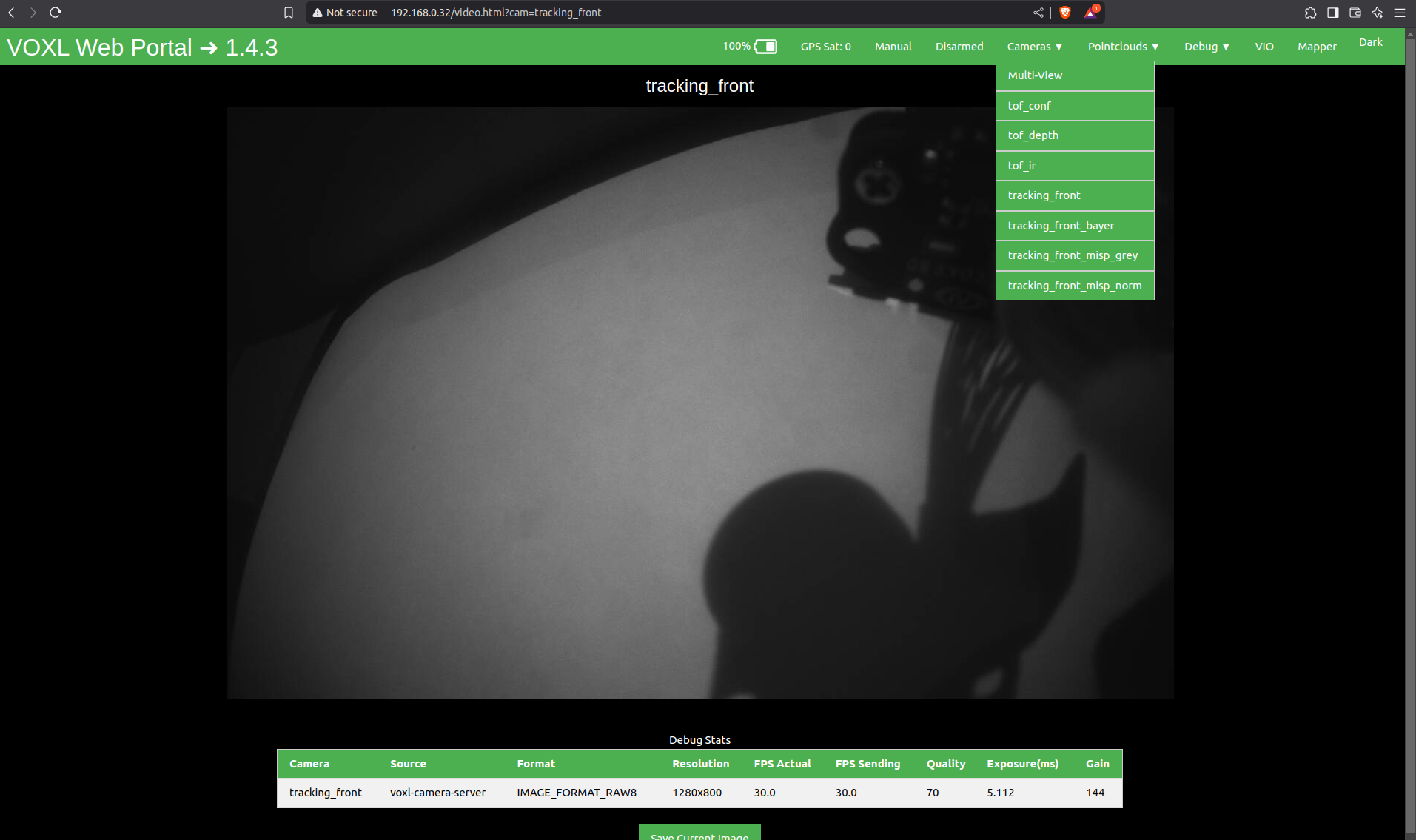
Thank you for help.
-
Thank you @Alex-Kushleyev
This is the output from my voxl-inspect-cam -a| Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |lt | tof_conf | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tof_depth | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tof_ir | 43200 | 180 | 240 | 2.70 | 0 | 2824 | 8 | tracking_front | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_bayer | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_misp_grey | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8 | tracking_front_misp_norm | 1024000 | 1280 | 800 | 12.00 | 1596 | 8926 | 8This is the output when I run voxl-camera-server.
voxl-camera-server existing instance of voxl-camera-server found, attempting to stop it MISP awb str: auto Setting MISP AWB to Autodetected system image 1.8.2 using new imx412 defaults MISP awb str: auto Setting MISP AWB to Auto================================================================= configuration for 4 cameras: cam #0 name: tracking_front sensor type: ar0144 isEnabled: 1 camId: 0 camId2: -1 fps: 30 en_rotate: 1 en_rotate2: 0 en_preview: 1 pre_width: 1280 pre_height: 800 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 1 misp_width: 1280 misp_height: 800 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: lme_msv msv_exposure_min_us: 20 msv_exposure_max_us: 12000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 cam #1 name: hires sensor type: imx412 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4056 large_video_height: 3040 en_misp: 0 misp_width: -1 misp_height: -1 en_snapshot: 1 snap_width: 4056 snap_height: 3040 exif_focal_length: 3.100000 exif_focal_len_35mm_format:17 exif_fnumber: 1.240000 ae_mode: isp msv_exposure_min_us: 20 msv_exposure_max_us: 33000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tof sensor type: pmd-tof-liow2 isEnabled: 1 camId: 2 camId2: -1 fps: 10 en_rotate: 1 en_rotate2: 0 en_preview: 1 pre_width: 240 pre_height: 1629 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 0 misp_width: -1 misp_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: off msv_exposure_min_us: 0 msv_exposure_max_us: 6000 gain_min : 0 gain_max : 0 standby_enabled: 0 decimator: 5 independent_exposure:0 cam #3 name: tracking_down sensor type: ar0144 isEnabled: 1 camId: 3 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 1280 pre_height: 800 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 1 misp_width: 1280 misp_height: 800 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: lme_msv msv_exposure_min_us: 20 msv_exposure_max_us: 12000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 fsync_en: 1 fsync_gpio: 109 ================================================================= thread is locked to cores: 4 5 6 7 connected to mavlink pipe Connected to cpu-monitor Starting Camera: tracking_front (id #0) gbm_create_device(156): Info: backend name is: msm_drm MISP Initializing!!! Detected 1 platform(s) Detected 1 GPU device(s) Starting Camera: hires (id #1) ERROR: Camera 1 failed to find supported stream config: 1024x768 WARNING: Failed to start cam hires due to invalid resolution WARNING: assuming cam is missing and trying to compensate Starting Camera: tof (originally id #2) with id offset: 1 Starting Camera: tracking_down (originally id #3) with id offset: 1 WARNING: cam tracking_down (id 2) does not seem to be alive ------ voxl-camera-server: Started 2 of 4 cameras ------ voxl-camera-server: Camera server is now running camera tracking_front frame size: 1024000 (1540096 alloc).. raw bpp: 8 WARNING: [ROYALE_WARNING] {ROYALE_FRAME_DROP}: Dropped 10223 frame(s). WARNING: [ROYALE_WARNING] {ROYALE_RAW_FRAME_STATS}: Raw frame drop stats: Bridge 10223 frames dropped, FC 0 frames dropped, 9 frames delivered. WARNING: [ROYALE_WARNING] {ROYALE_FRAME_DROP}: Dropped 9 frame(s). WARNING: [ROYALE_WARNING] {ROYALE_RAW_FRAME_STATS}: Raw frame drop stats: Bridge 9 frames dropped, FC 0 frames dropped, 81 frames delivered. ^C received SIGINT Ctrl-C ------ voxl-camera-server: Camera server is now stopping WARNING: Deleting buffers: 6 of 16 still in use WARNING: Deleting buffers: 6 of 16 still in use ------ voxl-camera-server: Camera server exited gracefully, returning 0this is my voxl sdk info
voxl2:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0054-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0.1 -------------------------------------------------------------------------------- voxl-suite: 1.4.3 -------------------------------------------------------------------------------- Packages:Thank you for help.
@voxl-phoenix , the connections look correct. Can you please clarify whether this setup was working (hires camera was working) and then suddenly stopped working? Or what changed between the time when it was working and now.
Alex
-
@voxl-phoenix , the connections look correct. Can you please clarify whether this setup was working (hires camera was working) and then suddenly stopped working? Or what changed between the time when it was working and now.
Alex
@Alex-Kushleyev I have got this camera two days back and I have connected it and tested them both they, worked fine. I had to unbrick my board so I unbricked it and installed new SDK 1.4.1.
It was working fine before and after installation. I have just disconnected the camera and conected it again, because I was installing it in the holder that I 3D printed, just before installing I have tested it once, it is not working since than. only once I have disconnected the cable and connected it again, it stopped working. I have checked there is no damage to cables or board. I have handled them properly.
-
@Alex-Kushleyev I have got this camera two days back and I have connected it and tested them both they, worked fine. I had to unbrick my board so I unbricked it and installed new SDK 1.4.1.
It was working fine before and after installation. I have just disconnected the camera and conected it again, because I was installing it in the holder that I 3D printed, just before installing I have tested it once, it is not working since than. only once I have disconnected the cable and connected it again, it stopped working. I have checked there is no damage to cables or board. I have handled them properly.
@voxl-phoenix , I think you also mentioned that you tried swapping the cables between tracking and imx412 camera, right? If so, it seems something got damaged in the IMX412 camera during connecting / disconnecting. For disconnecting the cables, we suggest using a special tool, please see https://docs.modalai.com/micro-coax-user-guide/#-proper-cable-and-adapter-handling- .
Also, it is hard to say for sure where exactly the issue is - M0173 board or IMX412 camera. the only good way find the cause is to replace components one at a time.
Just to elaborate on the symptoms that you are seeing :
voxl-camera-server -lcommand essentially probes all the cameras (based on the sensormodule files located in /usr/lib/camera). Probing involves turning the camera on via the reset GPIO and attempting to talk to the camera via I2c interface. If the camera responds, the probe is successful, otherwise failed. In your case, the probe of IMX412 failed, which means either the camera could not be turned on for various reasons or the i2c communication was not working.If you have another tracking camera AR0144, you could connect it instead of the IMX412 and see if the probe succeeds. You would need to add
/usr/share/modalai/chi-cdk/ar0144/com.qti.sensormodule.ar0144_1.binfile to/usr/lib/camera(which is the AR0144 sensormodule for the camera slot 1, where the IMX412 is currently connected). Then if you runvoxl-camera-server -land detect two AR0144 cameras (3 cameras total) then i2c communication and power should be working).Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login