Sentinel ESC blue leds don't remain solid or flash
-
Hi,
Apparently everything is working fine but rotors won't start. After inspecting the starling I noticed the ESC leds are not solid or flashing as they are supposed to be. They flash a couple of times during power up but then remain off.
I'm not sure if this has anything to do with it but I detected it after installing voxl-mapper package.
What kind of checks can I perform?
-
Hi,
Apparently everything is working fine but rotors won't start. After inspecting the starling I noticed the ESC leds are not solid or flashing as they are supposed to be. They flash a couple of times during power up but then remain off.
I'm not sure if this has anything to do with it but I detected it after installing voxl-mapper package.
What kind of checks can I perform?
@iparra , Can you please let us know which version of the SDK you are using?
Also, were you able to spin up motors during previous tests and now you are not able to?
You can do a quick check of the ESCs using the following commands:
#stop px4 systemctl stop voxl-px4 #run ESC scanner cd /usr/share/modalai/voxl-esc-tools/ ./voxl-esc-scan.pyThis tool will attempt to detect ESCs and will let you know if it can detect all 4 ESC channels. You can also verify the params:
./voxl-esc-verify-params.py -
@iparra , Can you please let us know which version of the SDK you are using?
Also, were you able to spin up motors during previous tests and now you are not able to?
You can do a quick check of the ESCs using the following commands:
#stop px4 systemctl stop voxl-px4 #run ESC scanner cd /usr/share/modalai/voxl-esc-tools/ ./voxl-esc-scan.pyThis tool will attempt to detect ESCs and will let you know if it can detect all 4 ESC channels. You can also verify the params:
./voxl-esc-verify-params.pyalso, if you use one of our latest px4 packages (http://voxl-packages.modalai.com/dists/qrb5165/dev/binary-arm64/voxl-px4_1.14.0-2.0.69-202402061301_arm64.deb), you can check PX4's ESC initialization status:
#run px4 in foreground and grep for VOXL_ESC: voxl-px4 -d | grep VOXL_ESC INFO [muorb] SLPI: VOXL_ESC: Starting VOXL ESC driver INFO [muorb] SLPI: VOXL_ESC: Opening UART ESC device 2, baud rate 2000000 INFO [muorb] SLPI: VOXL_ESC: Successfully opened UART ESC device INFO [muorb] SLPI: VOXL_ESC: Detecting ESCs... INFO [muorb] SLPI: VOXL_ESC: ESC ID : 0 INFO [muorb] SLPI: VOXL_ESC: Board Type : 37: ModalAi 4-in-1 ESC (M0134-1) INFO [muorb] SLPI: VOXL_ESC: Unique ID : 0x203330385246571900480024 INFO [muorb] SLPI: VOXL_ESC: Firmware : version 39, hash eb6fb500 INFO [muorb] SLPI: VOXL_ESC: Bootloader : version 183, hash b4fa2cf8 INFO [muorb] SLPI: VOXL_ESC: Reply time : 1646us INFO [muorb] SLPI: VOXL_ESC: INFO [muorb] SLPI: VOXL_ESC: ESC ID : 1 INFO [muorb] SLPI: VOXL_ESC: Board Type : 37: ModalAi 4-in-1 ESC (M0134-1) INFO [muorb] SLPI: VOXL_ESC: Unique ID : 0x2033303852465719004D004D INFO [muorb] SLPI: VOXL_ESC: Firmware : version 39, hash eb6fb500 INFO [muorb] SLPI: VOXL_ESC: Bootloader : version 183, hash b4fa2cf8 INFO [muorb] SLPI: VOXL_ESC: Reply time : 621us INFO [muorb] SLPI: VOXL_ESC: INFO [muorb] SLPI: VOXL_ESC: ESC ID : 2 INFO [muorb] SLPI: VOXL_ESC: Board Type : 37: ModalAi 4-in-1 ESC (M0134-1) INFO [muorb] SLPI: VOXL_ESC: Unique ID : 0x203330385246571900500042 INFO [muorb] SLPI: VOXL_ESC: Firmware : version 39, hash eb6fb500 INFO [muorb] SLPI: VOXL_ESC: Bootloader : versiINFO [qshell] Send cmd: 'voxl_esc start' INFO [muorb] SLPI: VOXL_ESC: Reply time : 1120us INFO [muorb] SLPI: VOXL_ESC: INFO [muorb] SLPI: VOXL_ESC: ESC ID : 3 INFO [muorb] SLPI: VOXL_ESC: Board Type : 37: ModalAi 4-in-1 ESC (M0134-1) INFO [muorb] SLPI: VOXL_ESC: Unique ID : 0x2033303852465719004D0050 INFO [muorb] SLPI: VOXL_ESC: Firmware : version 39, hash eb6fb500 INFO [muorb] SLPI: VOXL_ESC: Bootloader : version 183, hash b4fa2cf8 INFO [muorb] SLPI: VOXL_ESC: Reply time : 617us INFO [muorb] SLPI: VOXL_ESC: INFO [muorb] SLPI: VOXL_ESC: Use extened rpm packet : 1 INFO [muorb] SLPI: VOXL_ESC: All ESCs successfully detectedIf all goes well, you should see messages similar to above. If you don't see any VOXL_ESC messages, you are probably using an older PX4 package.
-
@iparra , Can you please let us know which version of the SDK you are using?
Also, were you able to spin up motors during previous tests and now you are not able to?
You can do a quick check of the ESCs using the following commands:
#stop px4 systemctl stop voxl-px4 #run ESC scanner cd /usr/share/modalai/voxl-esc-tools/ ./voxl-esc-scan.pyThis tool will attempt to detect ESCs and will let you know if it can detect all 4 ESC channels. You can also verify the params:
./voxl-esc-verify-params.py@Alex-Kushleyev Hi, The drone was working as expected. Then, we installed from package voxl-mapper and performed some tests without the rotors for a week, just holding the drone. When we were confortable with the voxl-mapping we tried to perform some tests on the maps and the paths created and then we realized It didn't work.
The outputs:
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.4
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
Got topic data before configuration complete
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received 99 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
WARNING: Received 92 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmware
WARNING: Received 286 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
terminate called after throwing an instance of 'qmi_error'
what(): qmi_client_send_msg_sync() failed, (client_id=)0, result=0: qmi service error (-2)
Aborted
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-verify-params.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.4
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: Success! Params in all ESCs are valid and identical. -
Output of the initialization status
voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-px4 -d | grep VOXL_ESC
ESC=VOXL_ESC
ESC: VOXL_ESCVersions of all the packages (I'm not sure about the SDK version)
voxl2:/usr/share/modalai/voxl-esc-tools$ dpkg -l | grep voxl
ii libvoxl-cci-direct 0.2.1 arm64 Library for CCI direct interface
ii libvoxl-cutils 0.1.1 arm64 ModalAI's c utils
ii mv-voxl 0.1-r0 arm64 mv version 0.1-r0
ii royale-331-spectre-4-7 1.1.1 arm64 Royale/Spectre build for voxl platforms
ii rtl8812au 5.6.4.2-git-r0 arm64 RTL8812au kernel driver (wifi) and supplemental files for enabling wifi on voxl2
ii voxl-bind-spektrum 0.1.0 arm64 Utility to trigger Spektrum Bind
ii voxl-camera-calibration 0.5.3 arm64 On-board camera calibration for VOXL
ii voxl-camera-server 1.8.9 arm64 publishes camera frames over named pipe interface
ii voxl-ceres-solver 2:1.14.0-10 arm64 ceres-solver for voxl
ii voxl-configurator 0.4.8 arm64 tools to configure and test MPA
ii voxl-cpu-monitor 0.4.7 arm64 publishes CPU Data over MPA pipe and provides fan tools
ii voxl-docker-support 1.3.0 arm64 tools to improve the usability of docker on VOXL
ii voxl-elrs 0.1.3 arm64 Tool to flash TX/RX with ELRS FW
ii voxl-esc 1.3.7 arm64 Tools for ModalAI's VOXL ESC
ii voxl-feature-tracker 0.3.2 arm64 track features on voxl
ii voxl-flow-server 0.3.3 arm64 optical flow from feature tracker
ii voxl-gphoto2-server 0.0.10 arm64 Gstreamer-based application to pull raw video frames from PTP cameras
ii voxl-jpeg-turbo 2.1.3-5 arm64 libjpeg_turbo build for voxl
ii voxl-lepton-server 1.2.0 arm64 Application to interface with flir lepton camera
ii voxl-libgphoto2 0.0.4 arm64 Library to control digital cameras over USB
ii voxl-libuvc 1.0.7 arm64 cross-platform library for USB video devices
ii voxl-logger 0.3.5 arm64 misc tools for modal pipe architecture
ii voxl-mapper 0.2.0 arm64 voxl-mapper
ii voxl-mavcam-manager 0.5.3 arm64 ModalAI implementation of the Mavlink camera protocol
ii voxl-mavlink 0.1.1 arm64 mavlink headers
ii voxl-mavlink-server 1.3.2 arm64 MPA interface for mavlink over UART or UDP
ii voxl-modem 1.0.8 arm64 VOXL Modem Utils
ii voxl-mongoose 7.7.0-1 arm64 mongoose build for voxl
ii voxl-mpa-to-ros 0.3.7 arm64 ROSNode converting MPA pipes
ii voxl-mpa-tools 1.1.3 arm64 misc tools for modal pipe architecture
ii voxl-neopixel-manager 0.0.3 arm64 background service to manage neopixel LEDs
ii voxl-nlopt 2.5.0-4 arm64 nlopt
ii voxl-opencv 4.5.5-2 arm64 opencv built for VOXL
ii voxl-portal 0.6.3 arm64 Debug web interface for VOXL
ii voxl-px4 1.14.0-2.0.63 arm64 ModalAI PX4 flight controller
ii voxl-px4-imu-server 0.1.2 arm64 fetches imu data from PX4 running on QRB5165 DSP and publishes over MPA
ii voxl-px4-params 0.3.3 arm64 Tool to help configure px4-parameters
ii voxl-qvio-server 1.0.0 arm64 publishes QVIO data over named pipe interface
ii voxl-remote-id 0.0.9 arm64 Remote ID broadcasting tool
ii voxl-streamer 0.7.4 arm64 Gstreamer-based application to handle RTSP streaming
ii voxl-suite 1.1.3 arm64 voxl-suite for QRB5165
ii voxl-tag-detector 0.0.4 arm64 Detect apriltags for MPA
ii voxl-tflite-server 0.3.1 arm64 client of voxl-camera-server that does deep learning
ii voxl-utils 1.3.8 arm64 ModalAI common on-target utilities for VOXL
ii voxl-uvc-server 0.1.6 arm64 libuvc application to handle UVC camera frame output to MPA
ii voxl-vision-hub 1.7.3 arm64 main hub managing communication between VOXL MPA services and autopilots
ii voxl-voxblox 1.1.5 arm64 voxblox library api
ii voxl2-system-image 1.7.1-r0 arm64 Meta package that is used to track system image version for DEPENDS in debian packages
ii voxl2-wlan 1.0-r0 arm64 Packages for voxl2 that enable wifi dongle compatibility -
@Alex-Kushleyev Hi, The drone was working as expected. Then, we installed from package voxl-mapper and performed some tests without the rotors for a week, just holding the drone. When we were confortable with the voxl-mapping we tried to perform some tests on the maps and the paths created and then we realized It didn't work.
The outputs:
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.4
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
Got topic data before configuration complete
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received 99 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
WARNING: Received 92 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmware
WARNING: Received 286 bytes of data from SLPI while SLPI uart not in use (topic aggregation)
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data
terminate called after throwing an instance of 'qmi_error'
what(): qmi_client_send_msg_sync() failed, (client_id=)0, result=0: qmi service error (-2)
Aborted
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-verify-params.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.4
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: Success! Params in all ESCs are valid and identical.@iparra , did you stop px4 before running the esc tools?
maybe you need to disable px4 and reboot if that does not help:
systemct disable voxl-px4 rebootto re-enable px4 later:
systemct enable voxl-px4 reboot -
@iparra , did you stop px4 before running the esc tools?
maybe you need to disable px4 and reboot if that does not help:
systemct disable voxl-px4 rebootto re-enable px4 later:
systemct enable voxl-px4 reboot@Alex-Kushleyev I upgraded with apt and repeated the tests
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.6
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmwareINFO: ESC Information:
INFO: ---------------------
ID : 0
Board : version 37: ModalAi 4-in-1 ESC (M0134-1)
UID : 0x203330385246571800240035
Firmware : version 39, hash 3d7ee4eb
Bootloader : version 183, hash b4fa2cf8ID : 1 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x20333038524657180025004D Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 2 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800230029 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 3 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800240021 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8
voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-px4 -d
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Disabling daemon mode
GPS=MRO_M10136A
RC=CRSF_RAW
ESC=VOXL_ESC
POWER MANAGER=VOXLPM
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=DISABLE
SENSOR_CAL=ACTUAL
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
ERROR [muorb] Test timed out waiting for response
INFO [parameters] Starting param sync THREAD
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
GPS: MRO_M10136A
RC: CRSF_RAW
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
DISTANCE SENSOR: NONE
OSD: DISABLE
EXTRA STEPS:
Running on M0054
INFO [param] selected parameter default file /data/px4/param/parameters
ERROR [parameters] Timeout waiting for parameter_client_reset_response
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_CAPACITY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_N_CELLS
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_R_INTERNAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_CHARGED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_EMPTY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT_CRIT_THR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ROT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR_COUNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CBRK_SUPPLY_CHK
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_ARM_SDCARD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_CPU_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_LAND
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_PRFLT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLIGHT_UUID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE1
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE4
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE6
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_OF_LOSS_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_SPOOLUP_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_ABL_LIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_EV_QMIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_GPS_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_HGT_REF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_X
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Y
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Z
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_MAG_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_RNG_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for GPS_UBX_DYNMODEL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_ACCEL_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_DGYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_DNF_EN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_RATEMAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_ROT_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_TRIG_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LND_FLIGHT_T_LO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MAV_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCH_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLL_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_HOR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_UP_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_JERK_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_LAND_SPEED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_HOVER
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TILTMAX_AIR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TKO_RAMP_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_VEL_MANUAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_CRUISE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_D_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_I_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_YAW_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for NAV_ACC_RAD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_TRIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_CHAN_CNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_FLTMODE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_KILL_SW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_PITCH
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_ROLL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_THROTTLE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_YAW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_DESCEND_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_RETURN_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_X_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_Y_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SYS_AUTOSTART
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for THR_MDL_FAC
INFO [parameters] BSON document size 2888 bytes, decoded 2888 bytes (INT32:33, FLOAT:99)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ist8310 magnetometer
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ncp5623c RGB LED
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [qshell] Send cmd: 'voxl_esc start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting CRSF RC driver
INFO [qshell] Send cmd: 'crsf_rc start -d 7'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'sensors start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'ekf2 start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_pos_control start' -
@Alex-Kushleyev I upgraded with apt and repeated the tests
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.6
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmwareINFO: ESC Information:
INFO: ---------------------
ID : 0
Board : version 37: ModalAi 4-in-1 ESC (M0134-1)
UID : 0x203330385246571800240035
Firmware : version 39, hash 3d7ee4eb
Bootloader : version 183, hash b4fa2cf8ID : 1 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x20333038524657180025004D Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 2 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800230029 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 3 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800240021 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8
voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-px4 -d
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Disabling daemon mode
GPS=MRO_M10136A
RC=CRSF_RAW
ESC=VOXL_ESC
POWER MANAGER=VOXLPM
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=DISABLE
SENSOR_CAL=ACTUAL
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
ERROR [muorb] Test timed out waiting for response
INFO [parameters] Starting param sync THREAD
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
GPS: MRO_M10136A
RC: CRSF_RAW
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
DISTANCE SENSOR: NONE
OSD: DISABLE
EXTRA STEPS:
Running on M0054
INFO [param] selected parameter default file /data/px4/param/parameters
ERROR [parameters] Timeout waiting for parameter_client_reset_response
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_CAPACITY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_N_CELLS
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_R_INTERNAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_CHARGED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_EMPTY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT_CRIT_THR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ROT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR_COUNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CBRK_SUPPLY_CHK
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_ARM_SDCARD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_CPU_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_LAND
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_PRFLT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLIGHT_UUID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE1
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE4
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE6
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_OF_LOSS_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_SPOOLUP_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_ABL_LIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_EV_QMIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_GPS_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_HGT_REF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_X
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Y
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Z
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_MAG_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_RNG_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for GPS_UBX_DYNMODEL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_ACCEL_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_DGYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_DNF_EN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_RATEMAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_ROT_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_TRIG_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LND_FLIGHT_T_LO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MAV_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCH_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLL_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_HOR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_UP_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_JERK_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_LAND_SPEED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_HOVER
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TILTMAX_AIR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TKO_RAMP_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_VEL_MANUAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_CRUISE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_D_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_I_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_YAW_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for NAV_ACC_RAD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_TRIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_CHAN_CNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_FLTMODE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_KILL_SW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_PITCH
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_ROLL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_THROTTLE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_YAW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_DESCEND_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_RETURN_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_X_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_Y_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SYS_AUTOSTART
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for THR_MDL_FAC
INFO [parameters] BSON document size 2888 bytes, decoded 2888 bytes (INT32:33, FLOAT:99)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ist8310 magnetometer
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ncp5623c RGB LED
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [qshell] Send cmd: 'voxl_esc start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting CRSF RC driver
INFO [qshell] Send cmd: 'crsf_rc start -d 7'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'sensors start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'ekf2 start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_pos_control start'Sometimes after running voxl-esc tools you need to reboot volx2 before you can run PX4 again. Can you please try that and check the PX4 log for VOXL_ESC messages?
Based on the output of voxl-esc scan, your ESCs are all detected, so there is no issue in communication there.
Another thing to try is the actuator test in QGC, which can let you spin up motors one by one (make sure to remove propellers before testing for safety)
-
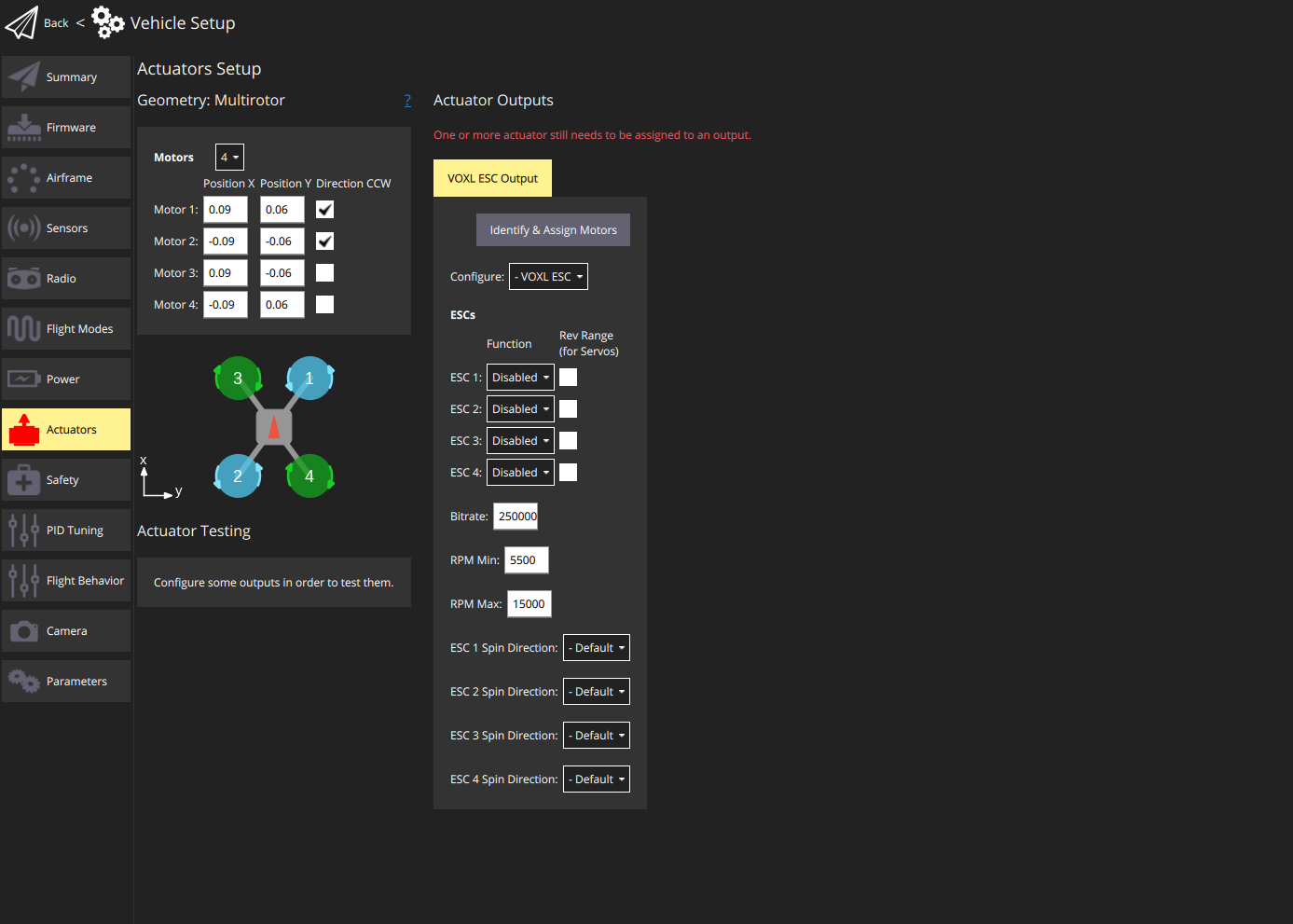
Sometimes after running voxl-esc tools you need to reboot volx2 before you can run PX4 again. Can you please try that and check the PX4 log for VOXL_ESC messages?
Based on the output of voxl-esc scan, your ESCs are all detected, so there is no issue in communication there.
Another thing to try is the actuator test in QGC, which can let you spin up motors one by one (make sure to remove propellers before testing for safety)
@Alex-Kushleyev Using QGC seems that we have lost some configuration of the rotors. It says "One or more actuator still needs to be assigned an output"
I attached a screen capture
-
@Alex-Kushleyev Using QGC seems that we have lost some configuration of the rotors. It says "One or more actuator still needs to be assigned an output"
I attached a screen capture
Yes, it looks like your params for VOXL ESC have been wiped.
If you take a look at this document : https://docs.modalai.com/voxl-px4-files/ , it points you here : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params and specifically for Sentinel here are the params you can load using QGC :

params/v1.14/platforms/Sentinel_V1.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core

GitLab (gitlab.com)
You can try just setting the VOXL ESC motor mapping and verify it using actuator test, but if those params got wiped for some reason, it is possible that other params also got wiped, so it may be best to restore the default Sentinel params.
-
Yes, it looks like your params for VOXL ESC have been wiped.
If you take a look at this document : https://docs.modalai.com/voxl-px4-files/ , it points you here : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params and specifically for Sentinel here are the params you can load using QGC :
params/v1.14/platforms/Sentinel_V1.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core
GitLab (gitlab.com)
You can try just setting the VOXL ESC motor mapping and verify it using actuator test, but if those params got wiped for some reason, it is possible that other params also got wiped, so it may be best to restore the default Sentinel params.
@Alex-Kushleyev Thank you Alex, we have a Starling with Voxl 2 so I assume we need Starling_V2.params
We also read that there's a backup of the params on /etc/modalai/voxl-px4-set-default-parameters.config. We have checked and that file exists. We will try to restore the params and get back to you.
-
@Alex-Kushleyev Thank you Alex, we have a Starling with Voxl 2 so I assume we need Starling_V2.params
We also read that there's a backup of the params on /etc/modalai/voxl-px4-set-default-parameters.config. We have checked and that file exists. We will try to restore the params and get back to you.
@iparra That file is not a backup of parameters. It is only used if there are no saved parameters and will just populate a few reasonable default values for certain VOXL2 parameters.
-
@iparra That file is not a backup of parameters. It is only used if there are no saved parameters and will just populate a few reasonable default values for certain VOXL2 parameters.
@Eric-Katzfey We loaded the default parameters with QGC and everything is back to normal.
Thank you for your help!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login