@Alex-Kushleyev
I inspected with the command and got the output below:
voxl2:/$ voxl-inspect-sku
family code: MRB-D0014 (starling-2)
compute board: 4 (voxl2)
hw version: 1
cam config: 27
modem config: 22 (M0141 w/ Alfa Networks WiFi Dongle AWUS036EACS)
tx config: 0 (none)
extras config: 0 (none)
SKU: MRB-D0014-4-V1-C27-T0-M22-X0
This is the correct setting and this is also suggested by the automatic detection of the wizard.
I tested the 3 settings below by modifying /etc/modalai/voxl-camera-server.conf
- all camera
- w/o IMX412
- only IMX412
The details are below.
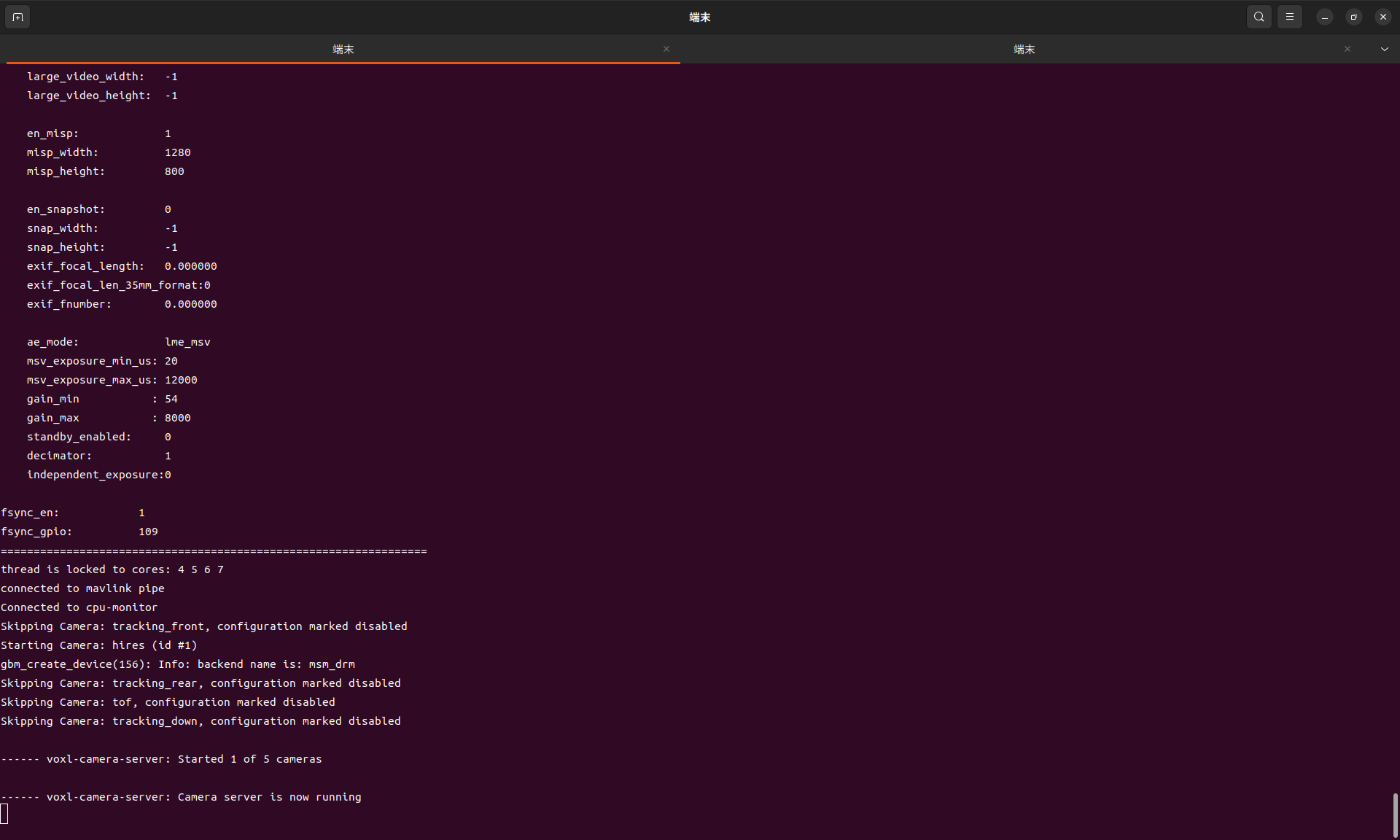
- all camera
Under this settings, as the drone's CPU load increases with such as viewing the image stream from VOXL portal, the likelihood that the process will fail increases. Sometimes, it dies during the starting up.
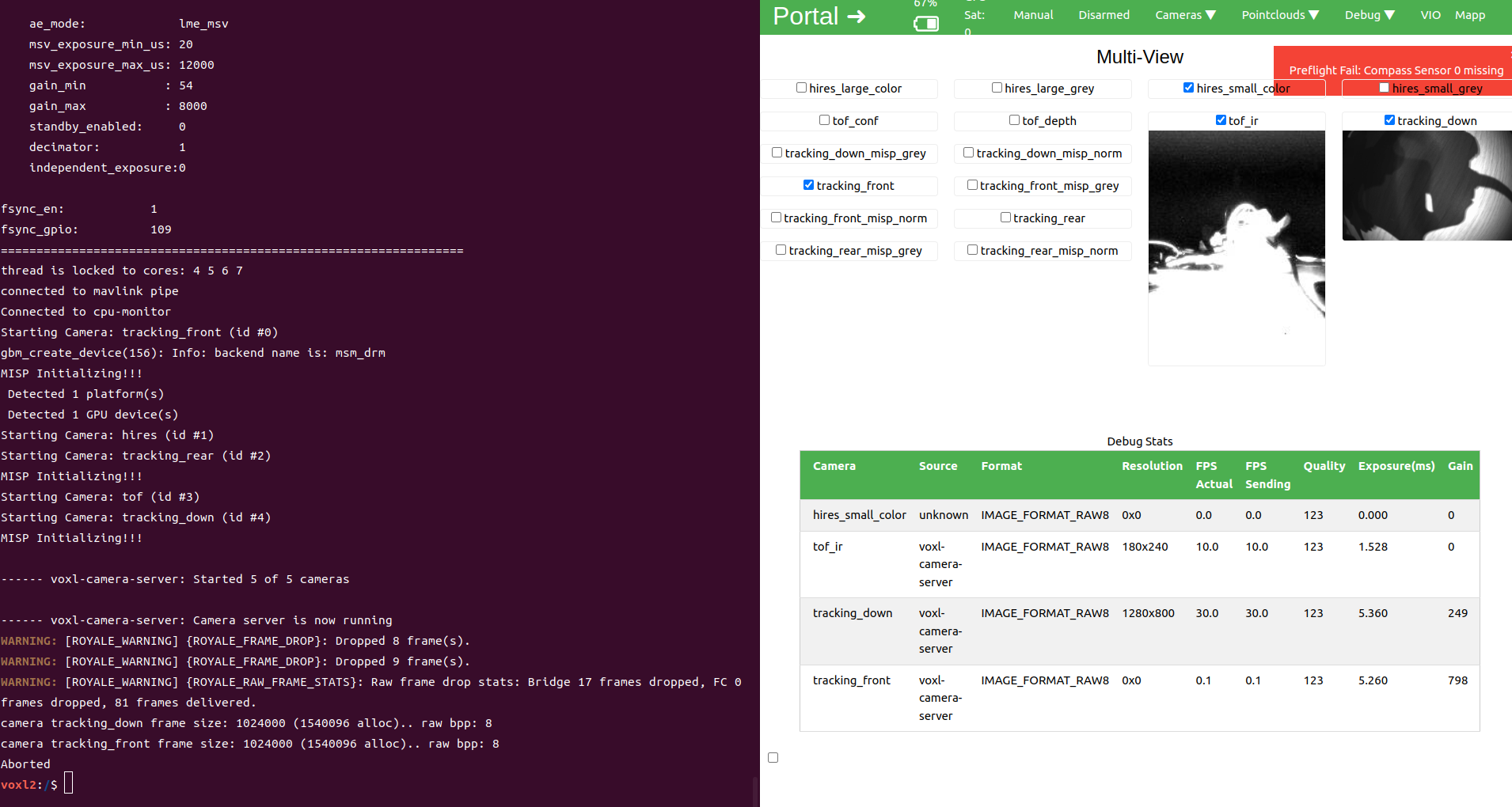
No output from voxl-inspect-cam -a
- w/o IMX412
This setting works fine. I can see the 4 image streams in VOXL portal.
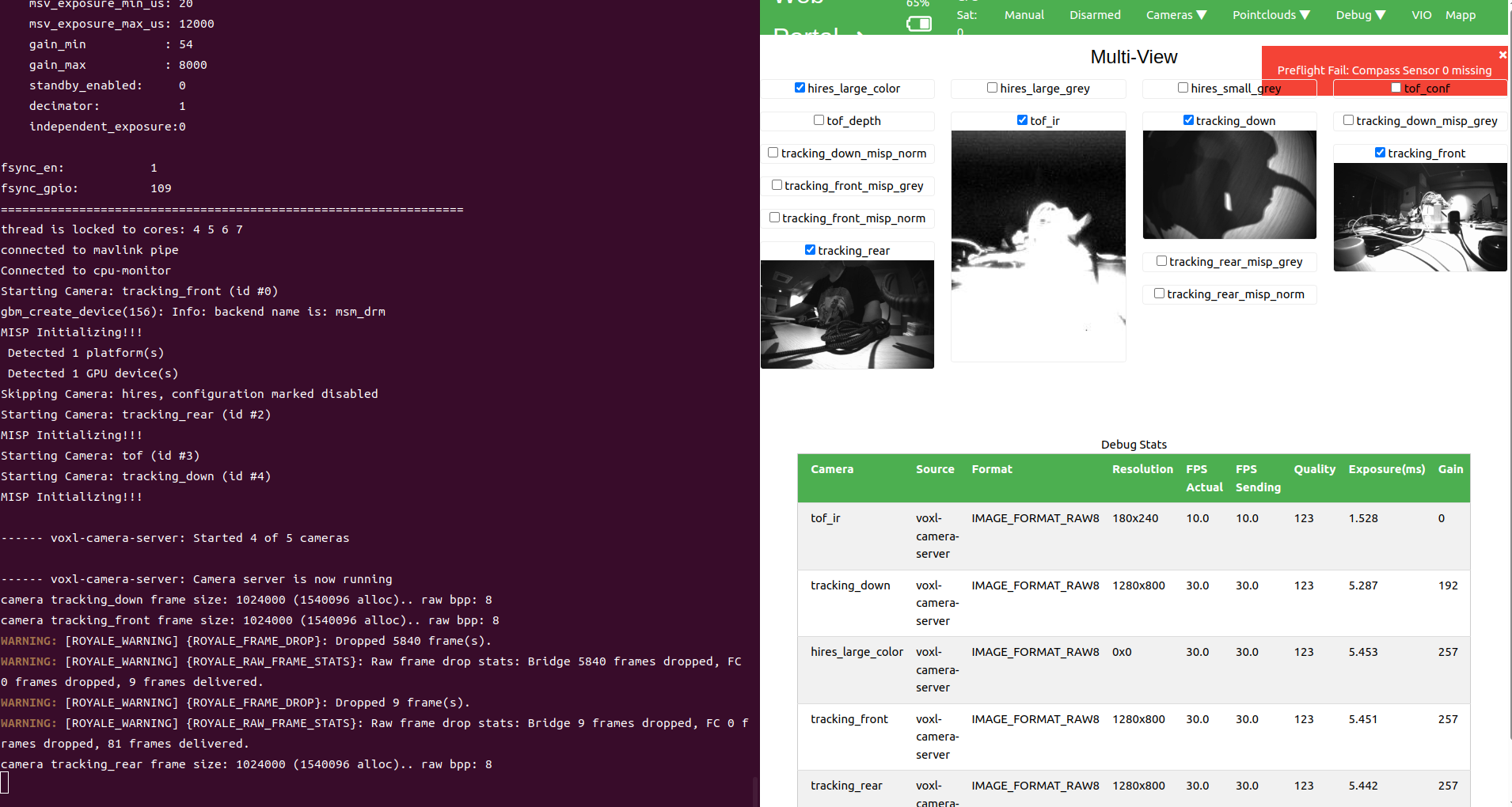
voxl-inspect-cam -a says:
| Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps t
| tof_conf | 43200 | 180 | 240 | 1.53 | 0 | 3559 | 23.4 | 10.0 | 3.58
| tof_depth | 43200 | 180 | 240 | 1.53 | 0 | 3560 | 23.3 | 10.0 | 3.58
| tof_ir | 43200 | 180 | 240 | 1.53 | 0 | 3560 | 23.2 | 10.0 | 3.58
| tracking_down | 1024000 | 1280 | 800 | 5.29 | 192 | 7690 | 31.1 | 30.0 | 245.88
| tracking_down_bayer | 1024000 | 1280 | 800 | 5.29 | 192 | 7690 | 30.7 | 30.0 | 245.88
| tracking_down_misp_grey | 1024000 | 1280 | 800 | 5.29 | 192 | 7690 | 29.8 | 30.0 | 245.88
| tracking_down_misp_norm | 1024000 | 1280 | 800 | 5.29 | 192 | 7690 | 30.9 | 30.0 | 245.88
| tracking_front | 1024000 | 1280 | 800 | 5.45 | 257 | 7577 | 30.8 | 30.0 | 245.88
| tracking_front_bayer | 1024000 | 1280 | 800 | 5.45 | 257 | 7577 | 30.8 | 30.0 | 245.88
| tracking_front_misp_grey | 1024000 | 1280 | 800 | 5.45 | 257 | 7577 | 29.8 | 30.0 | 245.88
| tracking_front_misp_norm | 1024000 | 1280 | 800 | 5.45 | 257 | 7577 | 31.3 | 30.0 | 245.88
| tracking_rear | 1024000 | 1280 | 800 | 5.42 | 249 | 7341 | 31.0 | 30.0 | 245.88
| tracking_rear_bayer | 1024000 | 1280 | 800 | 5.42 | 249 | 7341 | 31.0 | 30.0 | 245.88
| tracking_rear_misp_grey | 1024000 | 1280 | 800 | 5.42 | 249 | 7341 | 29.8 | 30.0 | 245.88
| tracking_rear_misp_norm | 1024000 | 1280 | 800 | 5.42 | 249 | 7341 | 31.1 | 30.0 | 245.88
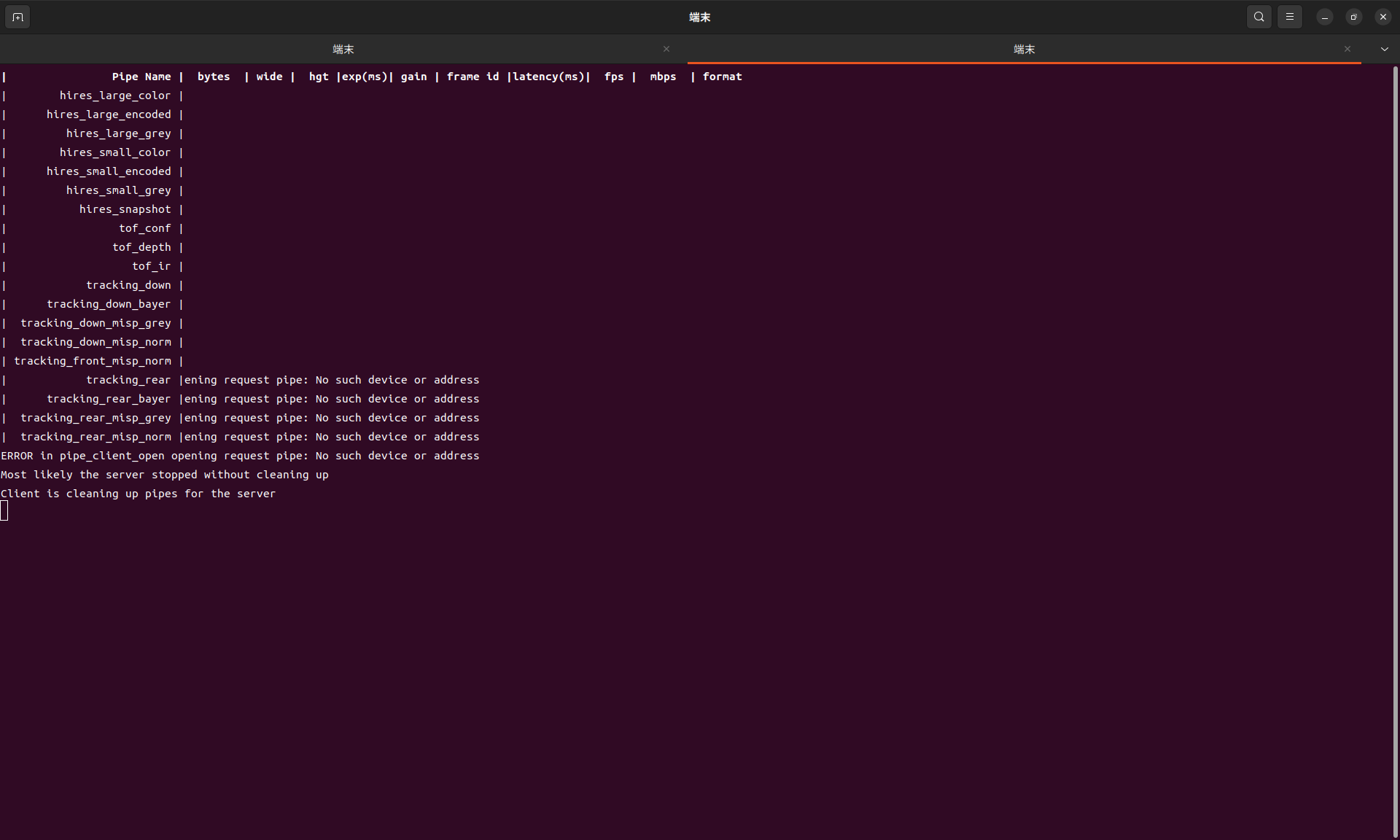
- only IMX412
No image stream.
(
| Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | fot
| hires_large_color |
| hires_large_encoded |
| hires_large_grey |
| hires_small_color |
| hires_small_encoded |
| hires_small_grey |
| hires_snapshot |
``
As the result, this one seems to have some hardware issue. I spent a lot of time for this but any resolutions do not work at all.
We have three of starling 2 and compared with the working one. There is no diff.
And, this one have not been healthy since the arrival, and we have unblicked it and reinstalled the SDK:
https://docs.modalai.com/voxl2-unbricking/
https://docs.modalai.com/flash-system-image/