Hello,
we are trying to calibrate a m0138 ESC using a VOXL2 mini. We have upgraded the ESC firmware using the provided scripts. We were able to run the script on m0 successfully and motors spun all the way to the max rpm set in the config file (see attached log). However, the calibration failed to spin the motors all the way up to the max pwm value for second motor (it keeps resetting to 0 , ramps up again and never exceeds about %15-20). attached is output log of the failed test as well.
we also tested a version which we updated the number of poles and kv to match our actuators and we seemed to experience similar issue.
link to calibration logs
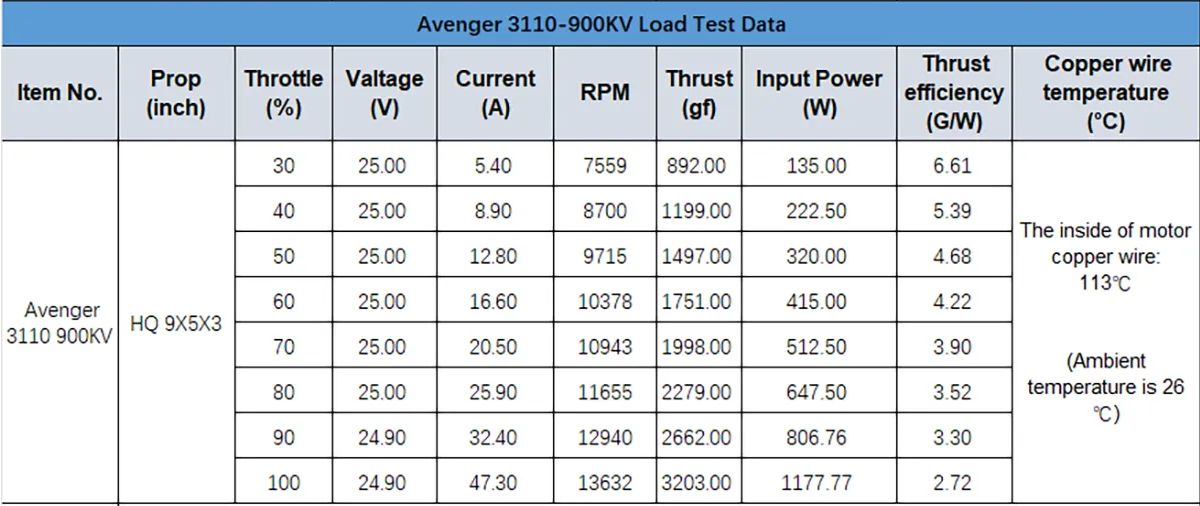
Below are some of printouts of the python scripts and also specifications for the actuator we are using:
./voxl-esc-board-detect.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
Found voxl-esc tools bin version: 1.9
VOXL Platform: M0104
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: Detected protocol: firmware
INFO: Additional Information:
INFO: ---------------------
ESC detected: ModalAi 4-in-1 ESC (M0138-1)
ESC detected: ModalAi 4-in-1 ESC (M0138-1)
ESC detected: ModalAi 4-in-1 ESC (M0138-1)
ESC detected: ModalAi 4-in-1 ESC (M0138-1)
---------------------
./voxl-esc-verify-params.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
Found voxl-esc tools bin version: 1.9
VOXL Platform: M0104
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: Params from ID 0 match ../voxl-esc-params/FPV_RevB/m0138_xing2_1855_5x4x3.xml
INFO: Params from ID 1 match ../voxl-esc-params/FPV_RevB/m0138_xing2_1855_5x4x3.xml
INFO: Params from ID 2 match ../voxl-esc-params/FPV_RevB/m0138_xing2_1855_5x4x3.xml
INFO: Params from ID 3 match ../voxl-esc-params/FPV_RevB/m0138_xing2_1855_5x4x3.xml
INFO: Success! Params in all ESCs are valid and identical.
./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
Found voxl-esc tools bin version: 1.9
VOXL Platform: M0104
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmware
INFO: ESC Information:
INFO: ---------------------
ID : 0
Board : version 42: ModalAi 4-in-1 ESC (M0138-1)
UID : 0x203030335546571500280020
Firmware : version 39.20, hash 9c6233d6
Bootloader : version 184, hash e1c038de
ID : 1
Board : version 42: ModalAi 4-in-1 ESC (M0138-1)
UID : 0x20303033554657150044001F
Firmware : version 39.20, hash 9c6233d6
Bootloader : version 184, hash e1c038de
ID : 2
Board : version 42: ModalAi 4-in-1 ESC (M0138-1)
UID : 0x2030303355465715004B0020
Firmware : version 39.20, hash 9c6233d6
Bootloader : version 184, hash e1c038de
ID : 3
Board : version 42: ModalAi 4-in-1 ESC (M0138-1)
UID : 0x20303033554657150027001E
Firmware : version 39.20, hash 9c6233d6
Bootloader : version 184, hash e1c038de
---------------------