@Eric-Katzfey
Hi,
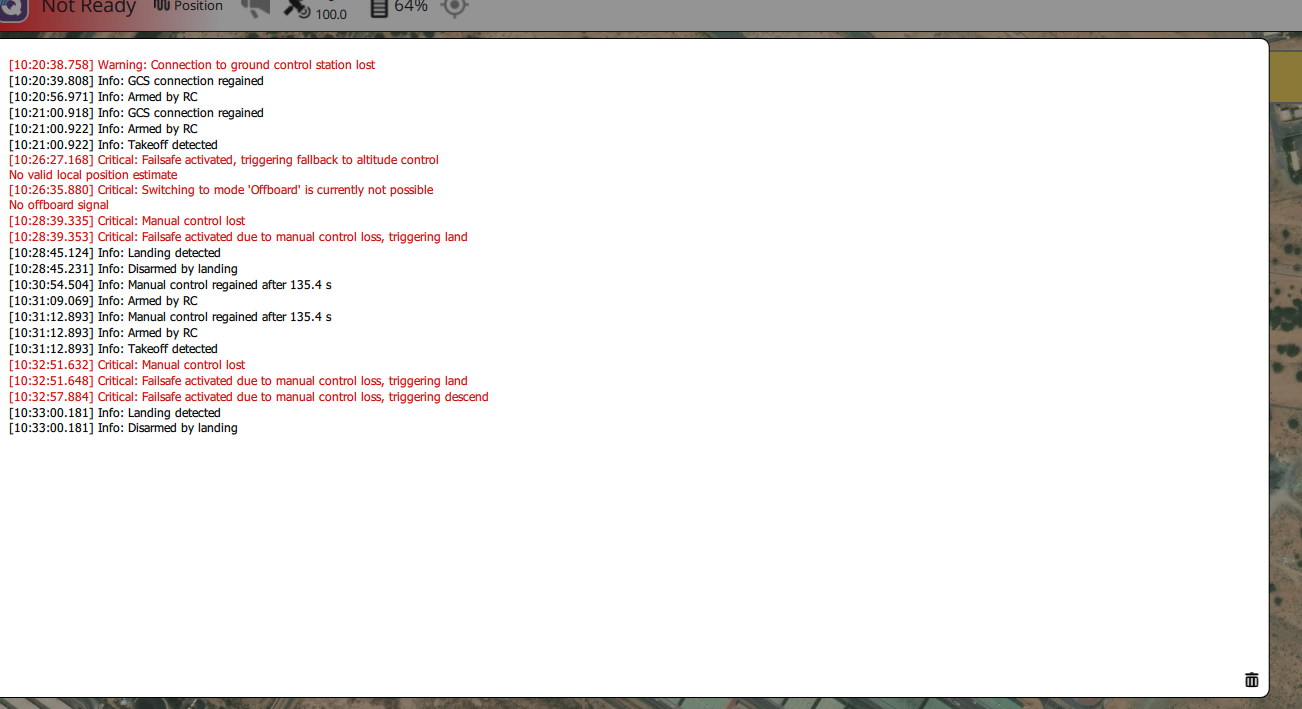
The first change of flight mode to "Altitude" was because of the loss of control of pilot (see it from the "Manual Control Output") on the drone.
This wasn't happened first time, I experienced the same before this flight too.
The steps you provided aren't suitable, I can't do the flights like "Manual" and then verify everything everytime, this is a random behavior, even if I try in the manual mode and get a good flight, I can still experience the bad flight afterwards.
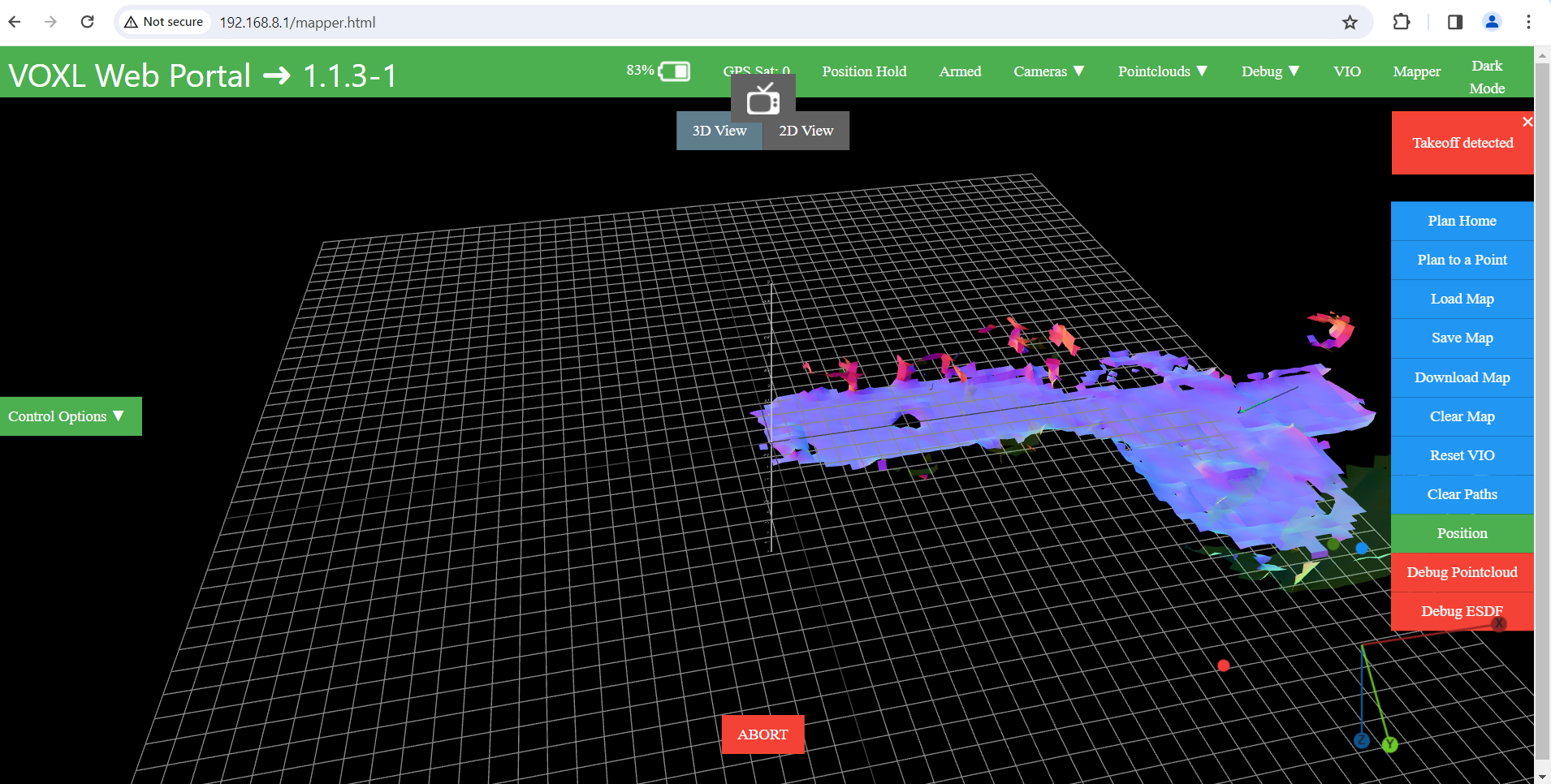
When I get the bad VIO data, I get the message of "invalid setpoints" in the log and over the QGC too and the drone goes into the "altitude" mode.
But, the problem I shared here is the loss of control over the drone, drone kept going upwards and even pulling the throttle to "0" isn't bring the drone to ground.
You can clearly see, even in the altitude flight mode (2nd time), the drone still kept going upwards at "0" throttle.
Please get us a fix for this.