@Vinny Solder pads look okay from what I can see. In addition to the two batteries we tested, we also used the included wall power.
K
KeeganBarrett
@KeeganBarrett
Posts
-
Starling unable to connect via wifi or adb -
Starling unable to connect via wifi or adbAfter a routine battery swap, the Starling is no longer connecting. We configured it to connect to our Star-link WiFi network out at the test field and flew many flights that way until today. We were unable to see it connected on the network. We then tried connecting directly using ADB with no luck.
Notes on the health LED status:
-
the LED directly beneath the Qualcomm chip blinks continuously when powered instead of performing the "solid green for <5 seconds once, then off under power"
-
The LEDs on the bottom of the ESC board flash rapidly for about a second on power up, then turn off. Afterwards, they flash 3 times slightly slower, then off for the rest of the session. The motors do still play the start up tune on power up.
-
All other LEDs are as they should according to the leds-status-voxl2 document.
Let us know if there is anything else we can try to diagnose and fix this issue, thanks!
-
-
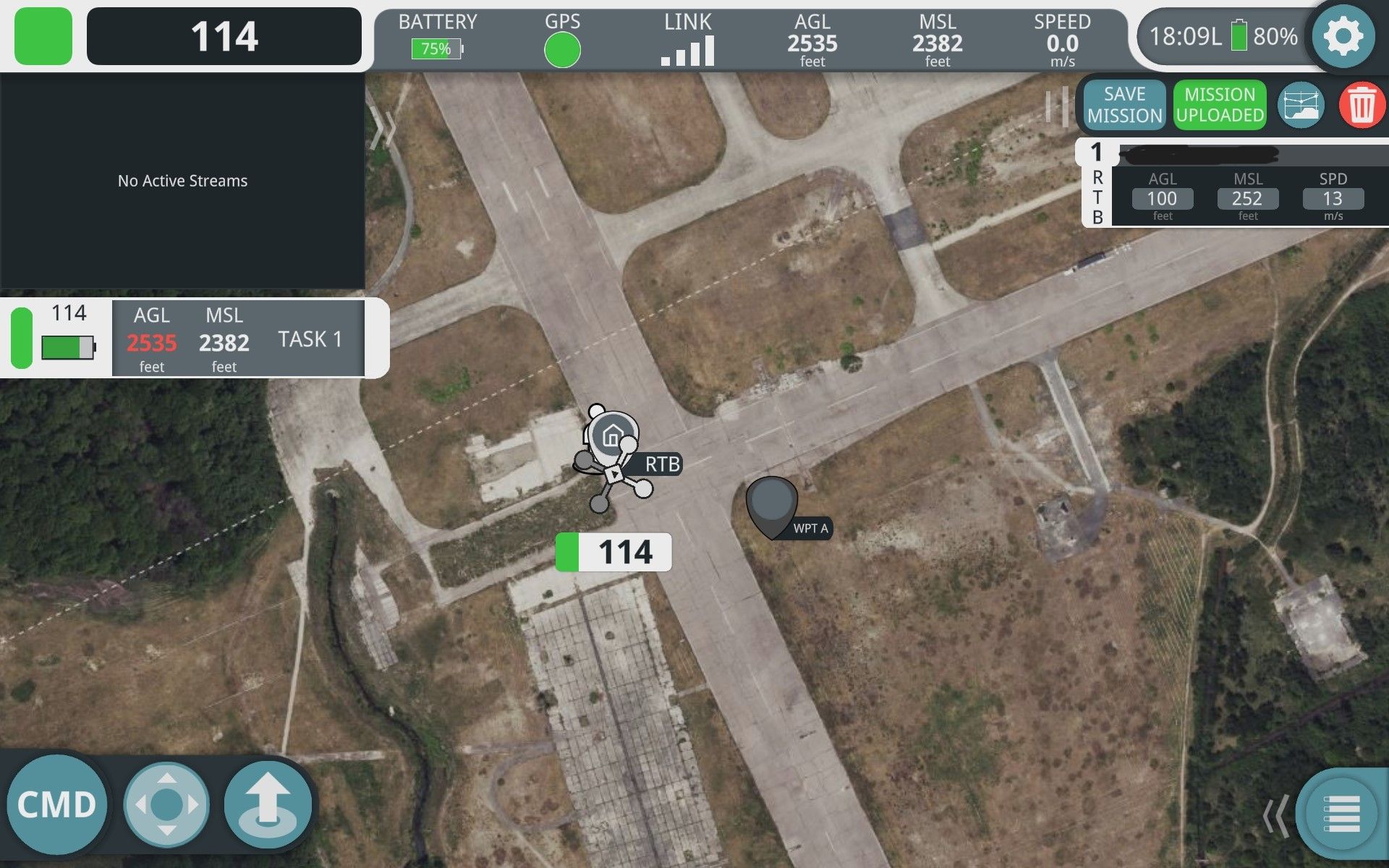
M500 Altitude IssuesSeveral of our m500 vehicles are experiencing issues with their altitude. Many times on the ground they will report altitudes of over 2,500 feet AGL or below -500 feet AGL. The vehicle is unable to launch while experiencing these huge variances in altitude. It sometimes will sort itself out, sometimes it requires a few power cycles. What could be causing these altitude readouts to be so far from truth? (attached is a screenshot from our gcs software showing the altitude)
In addition to these altitude issues, 3 out of 5 of the m500 vehicles we have flight tested are experiencing mid air altitude issues. They will constantly ascend and descend for no apparent reason. Let me know if there is a fix or explanation for this. Thanks.
-
Poor performance flying outdoors with no GPSwe tried a few different altitudes ranging from 30 feet AGL to 100 at 5 m/s. Same result. These test flights weren't long rang, the entire mission was only 2 waypoints, approximately 250 feet length mission. We'll try these test flights again using voxl-logger and try and diagnose the issues we're having.
-
Poor performance flying outdoors with no GPSWhen trying to fly a GPS denied mission with the m500 drone, the vehicle suffers from poor VIO flight. It does not follow the mission route properly, it will fly past its waypoints, all the while losing altitude. When looking at the QVIO stream during the mission we see that we have plenty of points but we're not getting good flight performance.
What can we do to improve this?
-
M500 heading issues@Chad-Sweet Looks like it was set to "no rotation." So it looks like the parameter had been changed accidentally. Looking at the parameter list, do I set the orientation to 10 or 6?
-
M500 heading issuesWith one of our M500 drones with the VOXL flight deck is having heading issues. The vehicle is reporting a heading that is around 90 degrees off from where it should be.
No amount of compass calibrations would rectify this, and there are no ferrous obstructions near the compass that would interfere. Any ideas as to what could be causing this issue?Here is a link to a flight: https://drive.google.com/file/d/1Qpf8b7SfiQASRapk-oUV_BNncVn3OTNh/view?usp=share_link
-
Jittering issue with VOXL Flight DeckLooks like the foam did the trick. No amount of tuning was able to stabilize the oscillations. The only issue with adding the foam was the FC reported "High Accelerometer Bias" which I was able to circumvent by loosening the tolerance by changing the COM_ARM_EKF_AB parameter. After all of that, the vehicle was rock steady
-
Jittering issue with VOXL Flight DeckDuring flight, the vehicle will jitter sporadically resulting in unstable flight performance. So far this has been the case with 2 different VOXL Flight Decks on 2 different air frames.
The first air frame was an S500 that seemingly jittered itself out of alignment and caused a flyaway. This required a disarm and resulted in major damages to the vehicle. The second frame is a S550 hexacopter that suffers from the same jittering. I have yet to try and fly it more than a few feet in order to avoid another catastrophic failure.
Here is a link to the video of the vehicle demonstrating the jittering as well as the flight log from that flight.
https://drive.google.com/file/d/1qC-QSBpfeilFXqP9ccWuXqoAIITrrDDn/view?usp=sharing
https://drive.google.com/file/d/1Qpf8b7SfiQASRapk-oUV_BNncVn3OTNh/view?usp=sharingAny advice or solutions would be greatly appreciated. Thank you.