Hello,
Setup: VOXL 2, SDK 1.4.1, Open-VINs Dual-ARR0144 Cameras
One of my setups will require the VOXL 2 to be mounted upside down, with the MIPI connectors for the cameras facing upwards. I've been preparing the extrinsic file for the setup and wanted confirmation on my understanding of how to properly configure the upside down configuration.
My understanding is such: You must configure PX4 to know the flight controller is upside down, simple enough, with this done, I then go into the extrinsic file and begin setting the rotation and positions offsets.
My question is this: For the "parent": "body",
"child": "imu1",
do you set a rotational value of 180 degrees to let the system know the imu is upside down? Then, do you set the camera rotational values to also include the rotation in the board.
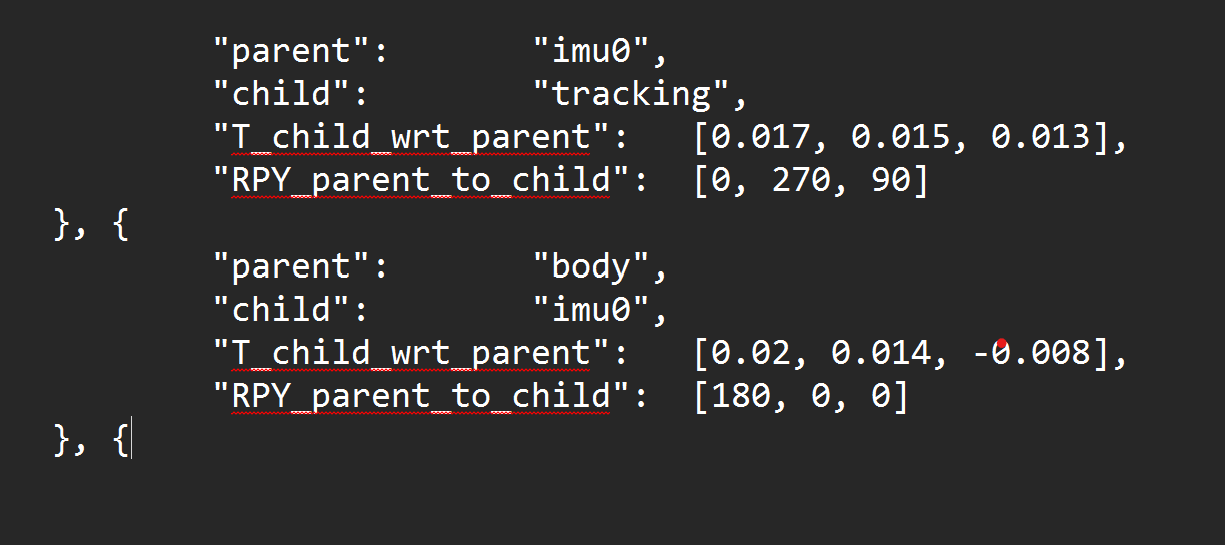
For example, the default extrinsic for a forward facing camera and right side up VOXL 2 are:
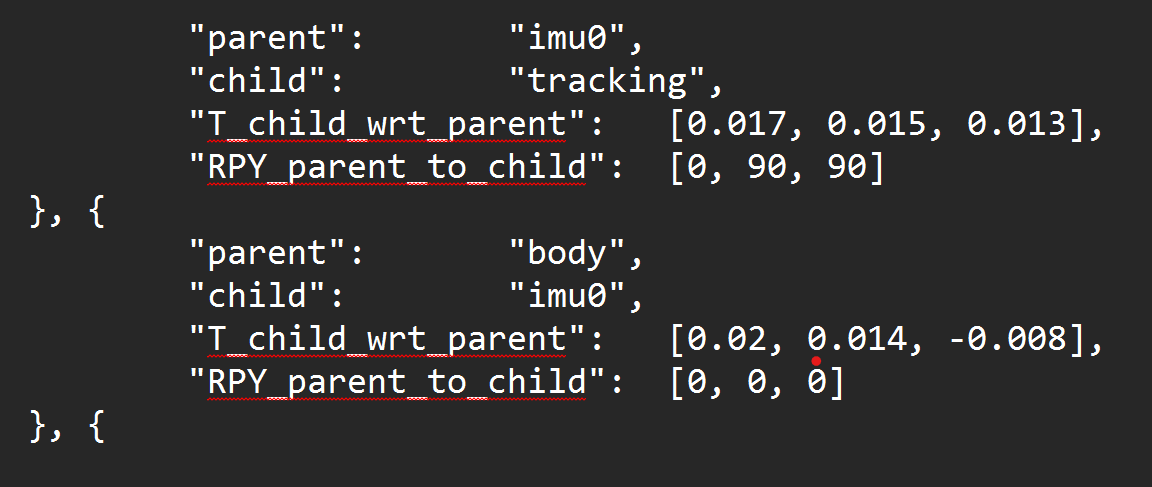
If the VOXL 2 were upside down, would the extrinsics be: