@brandon Do you have a plastic spudger tool? Something like this. A plastic tool will significantly reduce the possibility of damaging any components (compared to using anything hard like metal). Press only on the metal part of the connector to prevent warping that plastic nub end.
Typically we use a fingernail to press those connectors in place but for that connector in particular it would be hard to reach with a fingernail. 
Dobry Kolacz
@Dobry Kolacz
Posts
-
VOXL Starling 2 Max hires_front camera unresponsive -
VOXL Starling 2 Max hires_front camera unresponsive@brandon Hmm, they look fairly well plugged in as far as I can tell. I'd say look at it from a side profile and if you see anything sticking out or bulging, you'll know it was a poorly seated connector.
Just for good measure, go ahead and press against the back of those connectors just to be sure they're fully seated in there. From a side profile, everything should look flat/parallel with the board.
-
VOXL Starling 2 Max hires_front camera unresponsive@brandon Could you please send some photos of what your front camera assembly looks like. I'd like too see all the connections, some views of the camera itself, and what the plastic housing around the cams look like. We verify all cameras are working and get them focused during assembly so I'm trying to track down what could have caused the failure.
-
IMX412 Poor performance vs IMX214?We focus the lens then apply just a small drop on the outside of the barrel/threads where the lens interfaces with the housing
-
Motor Replacement Instructions Starling 2 Max@griffin Great to hear!!
It is possible, depending on what size tip and what kind of soldering iron you were using, that 650F may actually not have been hot enough. After talking about it with my team I realized that we have set our irons up to the 750-800F range.
Nonetheless, it is likely the safest option to just splice in the new wires just as you have done
-
IMX412 Poor performance vs IMX214?You're welcome!
The epoxy used is UV cure epoxy. Any uncured epoxy should be able to be wiped away with a microfiber as Alex mentioned, using isopropyl alcohol in conjunction does wonders.
We have recently switched to using RTV silicone to secure these lenses in place which seems to be working well for us.
-
Motor Replacement Instructions Starling 2 Max@griffin Sorry for the delay in response.
We use lead free solder so it is very important that a sufficient amount of flux is used during both the soldering and de-soldering process
Typical procedure for us would look something like putting some flux on the solder joint. We use Chip Quik SMD291 which can reliably be found on mouser.com or digikey.com Amazon might have it too.
It is very important that the soldering tip you are working with is clean and able to easily hold solder on any part of the working area you apply solder to (it shouldn't just bead up on one part of the tip and avoid the rest of the tip area). 650F should be plenty hot for the small solder pads on that ESC
With a clean tip, you can apply a small amount of solder to the tip (this will help thermal transfer and solder liquidation to happen faster)
Then place the slightly wetted side of the soldering tip to the pad. The flux will make it a bit smokey on first contact but the joint should fairly quickly liquidate and allow you to remove the wireHope that helps!
-
Batteries charging errorThat is a concerning failure rate.
In production we use these batteries on a daily basis with no issues. The only time we see failures is when the battery has seen a lot of use and eventually the power leads can break off from their soldered connection to the tabs on the cells. This happens when too much force is applied to the battery power cable typically when unplugging the battery from the drone.
It is imperative that whenever unplugging a battery from anything, all your pulling force must be applied through the XT30 connection. If force is applied anywhere else, there is a risk of damaging the power lead connections to the battery
.
.
.
.
And as a side note/reminder: please do not spin the motors when using the wall power supply, doing so will damage the ESC -
IMX412 Poor performance vs IMX214?If you cannot get the lens to spin with the epoxy in place, you can take some small tweezers and pick away at the glue. That should eventually free up enough of the threads/barrel to allow for focal adjustment.
Please ping me if you have issues getting the lens loose
-
Motor Replacement Instructions Starling 2 Max@griffin Were you able to get your motors replaced? It sounds like you had ordered the proper spec replacement motors
-
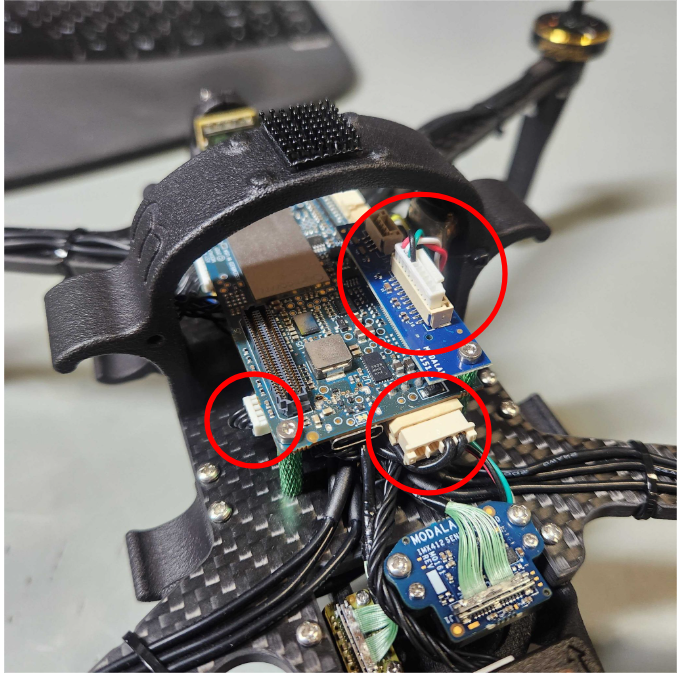
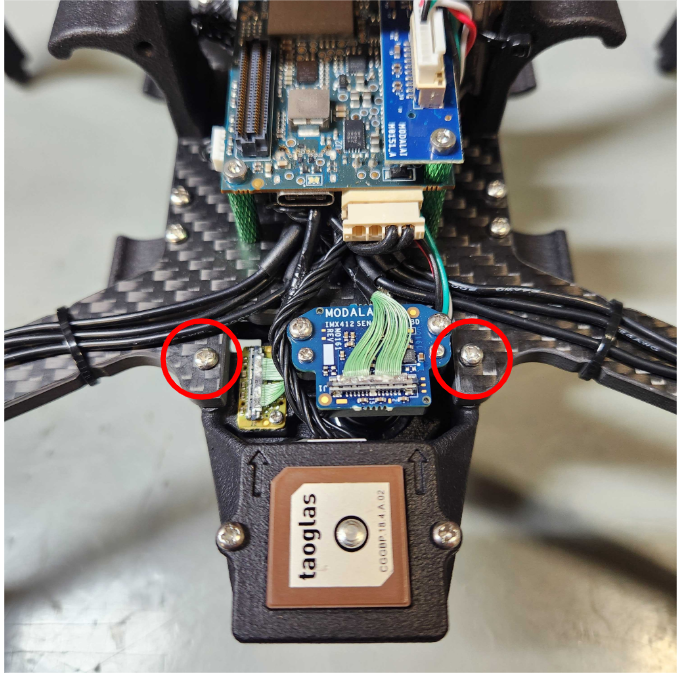
Motor Replacement Instructions Starling 2 MaxEasiest way to get to the ESC would be remove the connectors that are circled in red
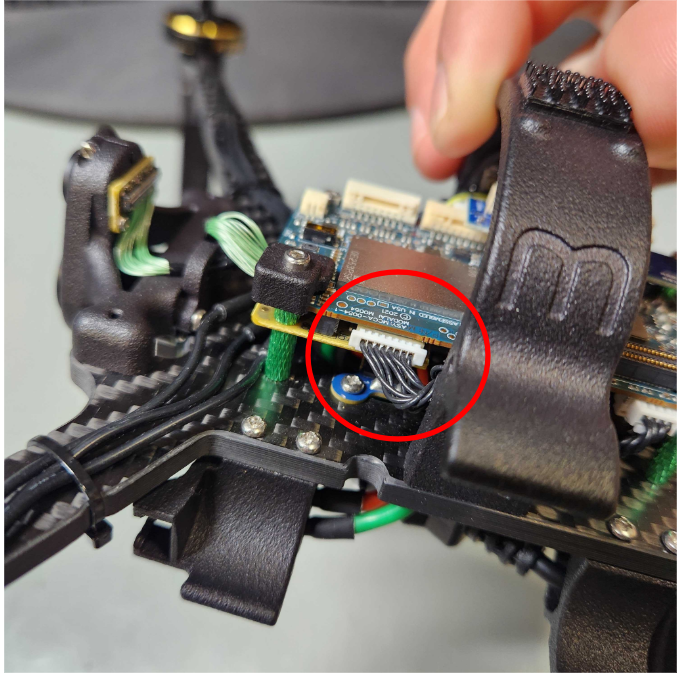
Remove the circled screws [PH1 drive] and cut the zip tie with the arrow pointing towards it
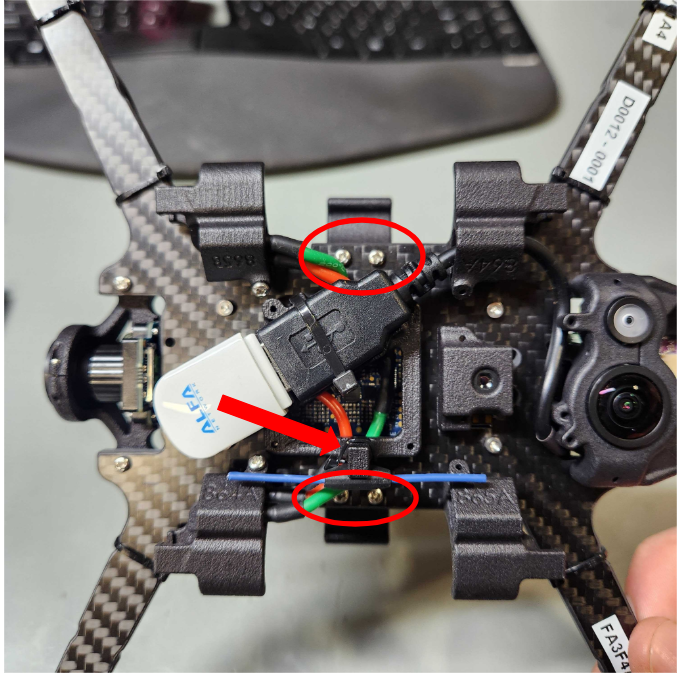
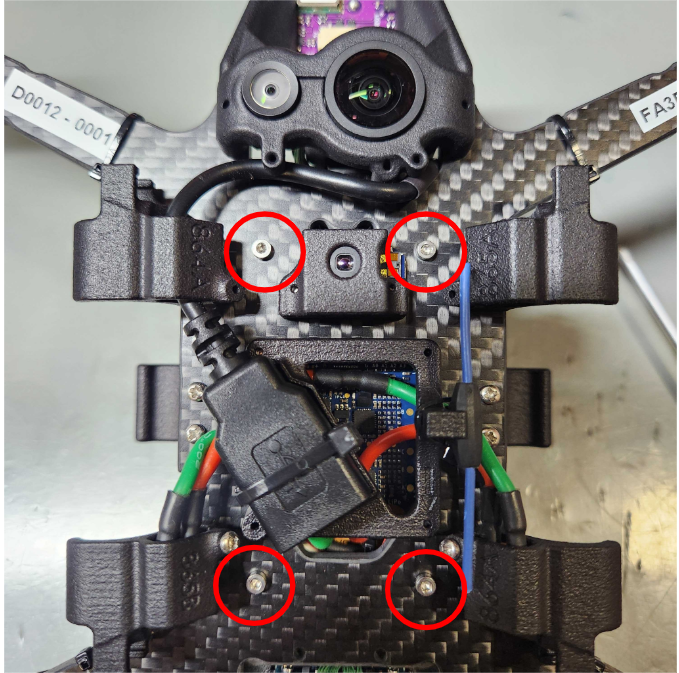
Remove these 2 screws [PH1 drive]
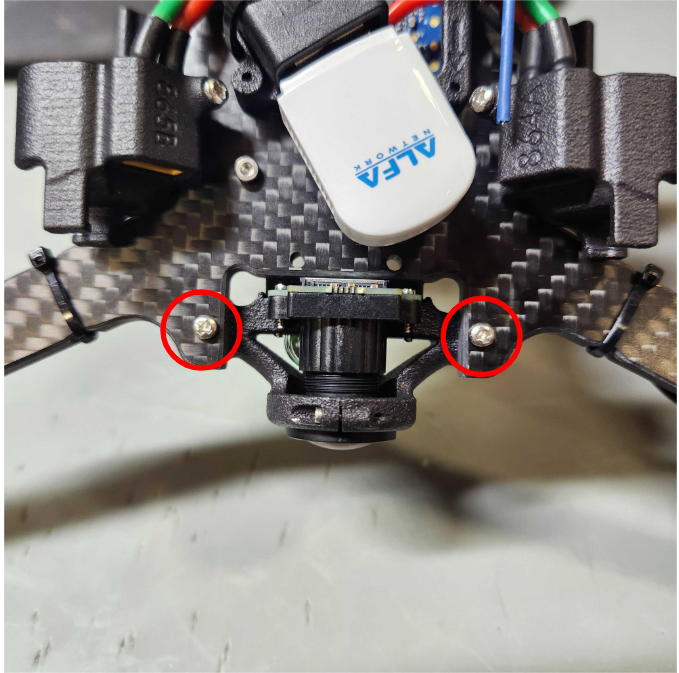
Remove these 2 screws [PH1 drive]
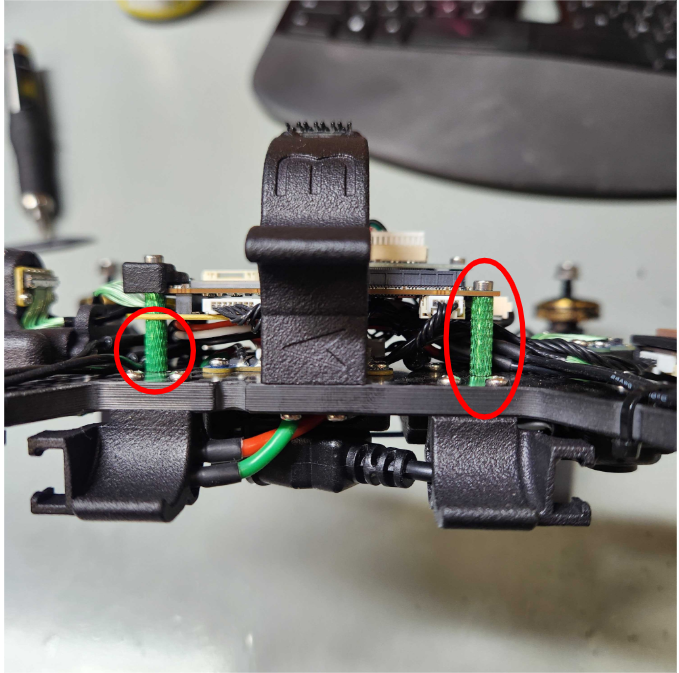
And finally, to get the board stack removed, you'll unscrew these 4 hex screws [1.5mm Hex Drive]
WHEN REMOVING THOSE HEX SCREWS, BE SURE THE CIRCLED STANDOFFS DO NOT ROTATE AT ALL, THIS COULD CAUSE THE SCREWS COMING FROM THE OTHER SIDE OF THE STANDOFF TO GET LOOSE
Keep these by rotating by carefully holding them in place with needle nose pliers or something similar
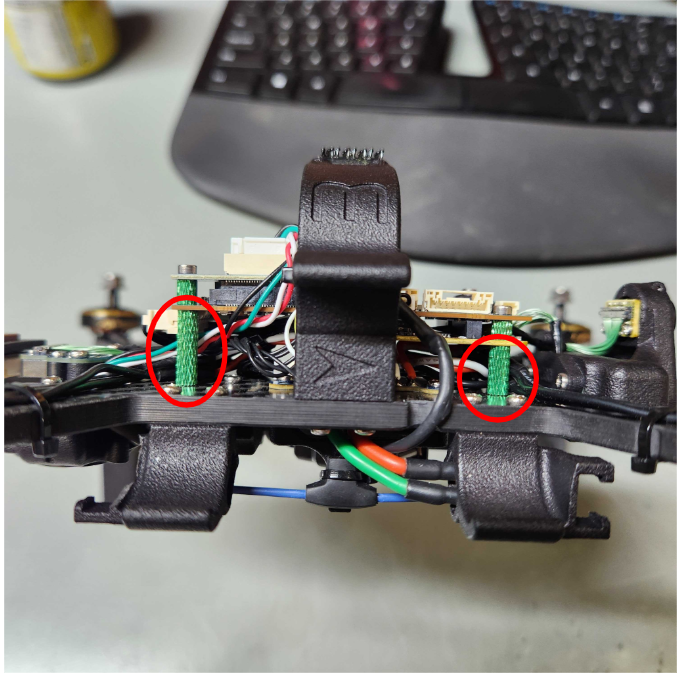
When re-assembling, just make sure all screws going into those standoffs are nice and snug (coming from both the top side and bottom side)
-
Motor Replacement Instructions Starling 2 Max@griffin Take a look at the drone and realize each motor has 3 wires and 3 pads on the ESC board they get soldered to. Each motor must be soldered to it's corresponding set of 3 pads. Once you get the wires long enough to be mounted to the frame and solder up to the pads, make sure you match your new motor wires to the correct set of pads for that motor (reference which pads your motors are currently soldered to). However, you won't have to worry too much about which wire goes to what pad (within the 3 pads available for your motor). If a motor is spinning the wrong way, you can reverse the motor rotation within QGC in the "actuator" menu. Alternatively, you can swap 2 of the wires with each other within the 3 pads/wires that are meant for that particular motor.
https://drones.stackexchange.com/questions/80/how-can-i-reverse-the-direction-of-a-brushless-motor
This link describes the same process, just in different words -
px4 disconnected from uart@Syed-Omair Follow the Red/Black/Yellow cables coming out of the flight core to the receiver
-
Stereo Camera Extrinsics@bendraper Are you working with a VOXL 2 flight deck?
What kind of values are you getting for the right and left intrinsics?
Have you tried running the whole calibration a few times from a position where the left and right intrinsics are good? Sometimes it's as simple as a lighting issue and a small adjustment in the positioning of the device relative to the room's lighting can make a meaningful difference. And sometimes running just extrinsics will not produce an acceptable result even if your intrinsics are good.If you've already ran through several calibrations with no success, I wonder if there is any offset in the cameras' positioning. This can come from a physical offset in the stereo camera mounting, but it can sometimes be related to the internal construction of the sensor itself (sometimes the image sensor is offset to the lens which leads to the stereo images not being on the same plane).
If you send a screenshot of the camera calibration overlay screen with your calibration board's top edge aligned with the top edge of the camera's view, it would provide me some more insight into your particular setup. I'm specifically looking to see if, for example, on one side you might have the top of the board aligned with the top of the camera's view while the other camera's image may have the top edge of the board significantly over or under the top of the camera's view. -
Sentinel drone randomly reboots@rohitpillai do you have a spare mcbl-0001 you can try on this setup?
-
Sentinel drone randomly reboots@rohitpillai When you removed the extension cable, were you still plugging the tracking camera into the M0054 board directly?
-
Vision failure everytime during takeoff@Tamas-Pal-0 What is the "quality" readout before takeoff when you run voxl-inspect-qvio ?
-
offboard height problem@張為超
run "voxl-inspect-qvio -n" to see a readout of qvio positioning and number/quality of features the camera is seeingI would recommend re-calibrating the compass within QGC to possibly fix the issue with altitude mode issues
I would also recommend cleaning the camera lenses with a clean cotton swab or microfiber cloth as the camera might have gotten dirty, resulting in interference with qvio's ability to work
QVIO is used for height/positioning when you are running your drone on the indoor vio parameters. This can be set up on both M500 and Seeker drones
-
Motor DamagedThough I cannot answer your question about sourcing/ordering a motor replacement, I just want to point out that there are two washers placed in between each motor and arm on the drone frame. Each arm has the washers installed in a specific location to aid handling. Observe and take note of the washer position so when you take off and replace the motor, you will be able to properly reinstall the washers