Hello I was just trying to calibrate the 4 in 1 ESC and it caught on fire! Why did this happen? Can you guys replace it? I am so confused.
A
Posts made by AP123
-
4 in 1 ESC caught fire!posted in ESCs
-
ESC Calibration Error Voxl2posted in ESCs
I'm trying to Calibrate my 4 in 1 ESCs. I run the command listed here https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/master/voxl-esc-tools/calibration.md. At the end, no calibration parameters file is printed, only error. How can i fix this to get the parameters file so i may upload it through the Voxl with this command ./voxl-esc-upload-params.py --params-file ../voxl-esc-params/<params_file>.xml to successfully calibrate the ESCs?
Thank You
ERROR IS BELOW:
./voxl-esc-calibrate.py --id 0 --pwm-min 10 --pwm-max 95 --pwm-step 3 --pwm-step-duration 0.7
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
Found voxl-esc tools bin version: 1.4
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
WARNING:
This test requires motors to spin at high speeds with
propellers attached. Please ensure that appropriate
protective equipment is being worn at all times and
that the motor and propeller are adequately isolated
from all persons.For best results, please perform this test at the
nominal voltage for the battery used.Type "Yes" to continue: yes
POW: 0, RPM: 1353.00, Voltage: 15.79V, Current: 0.05A
POW: 0, RPM: 1369.00, Voltage: 15.79V, Current: 0.05A
POW: 0, RPM: 1385.00, Voltage: 15.79V, Current: 0.02A
POW: 0, RPM: 1419.00, Voltage: 15.79V, Current: 0.07A
POW: 0, RPM: 1419.00, Voltage: 15.79V, Current: 0.07A
POW: 0, RPM: 1453.00, Voltage: 15.79V, Current: 0.02A
POW: 0, RPM: 1453.00, Voltage: 15.79V, Current: 0.02A
POW: 0, RPM: 1486.00, Voltage: 15.79V, Current: 0.17A
POW: 0, RPM: 1486.00, Voltage: 15.79V, Current: 0.17A
POW: 0, RPM: 1499.00, Voltage: 15.79V, Current: 0.02A
POW: 5, RPM: 1569.00, Voltage: 15.79V, Current: -0.23A
POW: 10, RPM: 969.00, Voltage: 15.79V, Current: -0.02A
POW: 10, RPM: 969.00, Voltage: 15.79V, Current: -0.02A
POW: 10, RPM: 928.00, Voltage: 15.79V, Current: 0.12A
POW: 10, RPM: 913.00, Voltage: 15.79V, Current: 0.01A...
POW: 46, RPM: 4759.00, Voltage: 15.77V, Current: 0.23A
POW: 46, RPM: 4759.00, Voltage: 15.77V, Current: 0.26A
...POW: 79, RPM: 8226.00, Voltage: 15.75V, Current: 0.38A
POW: 79, RPM: 8162.00, Voltage: 15.75V, Current: 0.39A
...POW: 94, RPM: 9683.00, Voltage: 15.74V, Current: 0.45A
POW: 94, RPM: 9691.00, Voltage: 15.74V, Current: 0.42AINFO: Test took 20.56 seconds
Quadratic fit: motor_voltage = a2rpm_desired^2 + a1rpm_desired + a0
a0 = -177.472309779
a1 = 1.57805489295
a2 = -3.72938840838e-06
ESC Params (after scaling):
pwm_vs_rpm_curve_a0 = -177.472309779
pwm_vs_rpm_curve_a1 = 1.57805489295
pwm_vs_rpm_curve_a2 = -3.72938840838e-06
Traceback (most recent call last):
File "./voxl-esc-calibrate.py", line 194, in <module>
plt.plot(rpms, motor_voltages, 'bo')
File "/usr/lib/python3/dist-packages/matplotlib/pyplot.py", line 3250, in plot
ax = gca()
File "/usr/lib/python3/dist-packages/matplotlib/pyplot.py", line 962, in gca
return gcf().gca(**kwargs)
File "/usr/lib/python3/dist-packages/matplotlib/pyplot.py", line 592, in gcf
return figure()
File "/usr/lib/python3/dist-packages/matplotlib/pyplot.py", line 539, in figure
**kwargs)
File "/usr/lib/python3/dist-packages/matplotlib/backend_bases.py", line 171, in new_figure_manager
return cls.new_figure_manager_given_figure(num, fig)
File "/usr/lib/python3/dist-packages/matplotlib/backends/backend_tkagg.py", line 1049, in new_figure_manager_given_figure
window = Tk.Tk(className="matplotlib")
File "/usr/lib/python3.6/tkinter/init.py", line 2023, in init
self.tk = _tkinter.create(screenName, baseName, className, interactive, wantobjects, useTk, sync, use)
_tkinter.TclError: no display name and no $DISPLAY environment variable -
Do i need to calibrate 4 in 1 ESC for Voxl 2?posted in ESCs
Do i need to calibrate 4 in 1 ESC for Voxl 2? i have a M0134.
-
RE: Voxl 2 IO and PWM outputsposted in VOXL 2
@tom stuck here
INFO: perform manual power cycle now, if needed
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
Updated baud rate to 230400
INFO: Installing firmware to ESC ID 0 : /home/root/m0065_firmware.binI plug the cord into the IO board and nothing happens.
-
RE: Voxl 2 IO and PWM outputsposted in VOXL 2
@tom 1.1.1 is out and it is not working? was it not added as planned??
-
RE: Props spinning affect collision prevention?posted in VOXL 2
@Moderator Any idea where in the code i would do that? Trying to understand the code but it is a little confusing, a lot of your variables are initialized with pass through values.
-
Props spinning affect collision prevention?posted in VOXL 2
How can i black out the frames of the stereo that see the blades so collision prevention will work? How did you guys do it? We have the same exact drone with 10 in props and the stereo sees the props spinning and wont move if collision prevention is enabled.
-
RE: Will the blades spinning affect collision prevention?posted in VOXL 2
@Moderator Please tell me how i can narrow the frame of the stereo in the code.
-
RE: Will the blades spinning affect collision prevention?posted in VOXL 2
@Moderator Yes i see them on the Voxl portal under stereo rear and front is there a way i can shrink the stereo image scope? or must i get smaller props?
-
Will the blades spinning affect collision prevention?posted in VOXL 2
Will the blades spinning affect collision prevention? For some reason when i have it enabled the drone will not move while hovering. I open the stereo screen on the VOXL portal and i do see the blades there.If that is the reason it wont move what do you suggest? I have the flight deck mounted on a S500 HolyBro. Should i reposition the stereos within the Voxl 2 or is there a way to shorten the line of sight at all in the code for the stereos?
-
RE: Voxl 2 IO and PWM outputsposted in VOXL 2
@Jetson-Nano I believe they are planning a release that supports this in two weeks. A 4 in 1 ESC is the only option right now.
-
RE: avoidance collision prevention disabledposted in VOXL 2
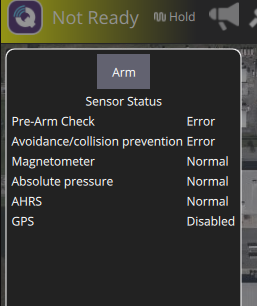
@wilkinsaf Hey Wilk, Thank you so much for the suggestion, i unplugged the GPS/MAG it changed to error, did you guys turn them off in the parms? Do you just leave it off to use collision prevention?
-
RE: avoidance collision prevention disabledposted in VOXL 2
@tom i just flashed my other voxl 2 to the 1.1.0, i like how you guys simplified the setup process for sure with the GPS, MPA, WIFI, camera and ESC setup. Although after i ran the command systemctl enable voxl-dfs-server and rebooted the drone. The data for the DFS was flowing but still, avoidance system not ready.
I did all this:
"MPC_POS_MODE = Simple pos control or smooth pos control, COM_OBS_AVOID is enabled, CP_DIST > 0 (e.g. 2) and you must have an established home position (or good position from qvio if that is the case). Typically an "obstacle system not ready" is due to the MPC_POS_MODE (I think we default to acceleration-based input)."
Do you have a brand new drone sitting somewhere you can unbox to try to reproduce this issue? I didn't have my ESC board on it and the PWM isn't compatible yet could that be the issue? I wish you guys would make a video of setting it up not just flying it around the office.
-
RE: avoidance collision prevention disabledposted in VOXL 2
@tom Yes i was having a bit of an issue with the ESC 4 in 1 so i stuck to the 0.9.5 SDK and PWM board. Does 1.1.0 address any ESC 4 in 1 issues?
-
RE: avoidance collision prevention disabledposted in VOXL 2
@tom is it compatible with the PWM board 0065?
-
RE: Troubleshooting/Improving VIO Accuracyposted in GPS-denied Navigation (VIO)
@nickyblanch Hey Nicky Thank you for posting on here! I'm having issues with the VIO as well but my error is, "avoidance system not ready" with a "pre-arm check" error. This only happens when i enable obstetrical avoidance under safety on OGC. Was this occurring with you before by chance?
-
RE: avoidance collision prevention disabledposted in VOXL 2
@Cliff-Wong said in avoidance collision prevention disabled:
voxl-inspect-points voa_pc_out
Thank you Cliff for your support, everything is set properly and i am getting data from oxl-inspect-points voa_pc_out.

Isn't home position set once i arm the drone? How can i do that if it wont let me arm it?