@Eric-Katzfey Update:
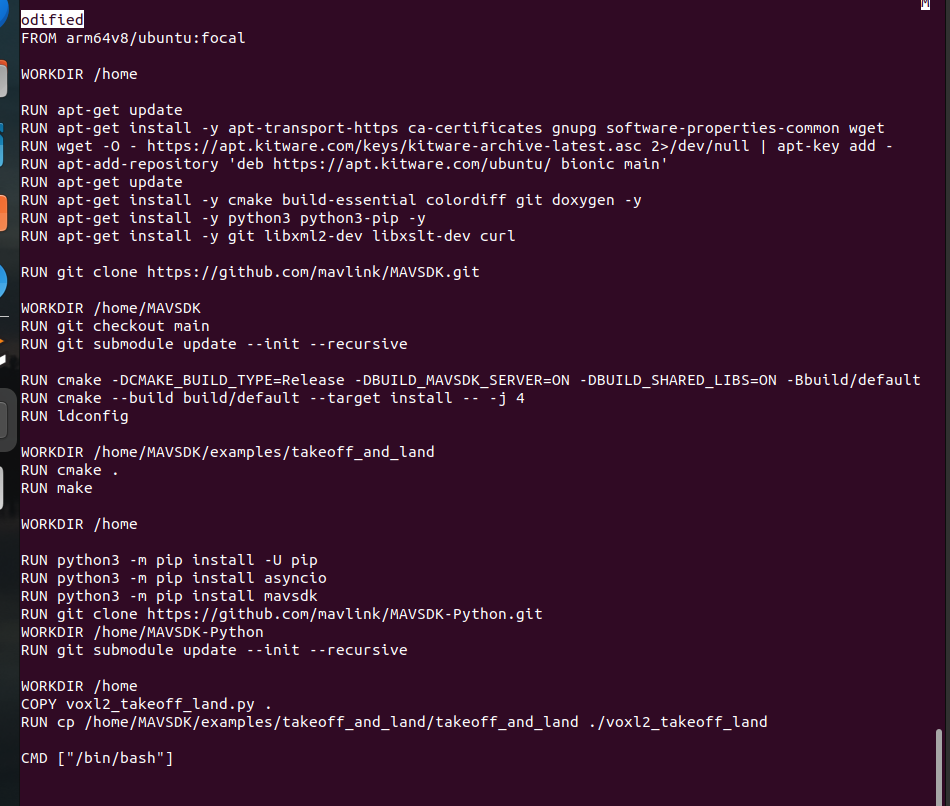
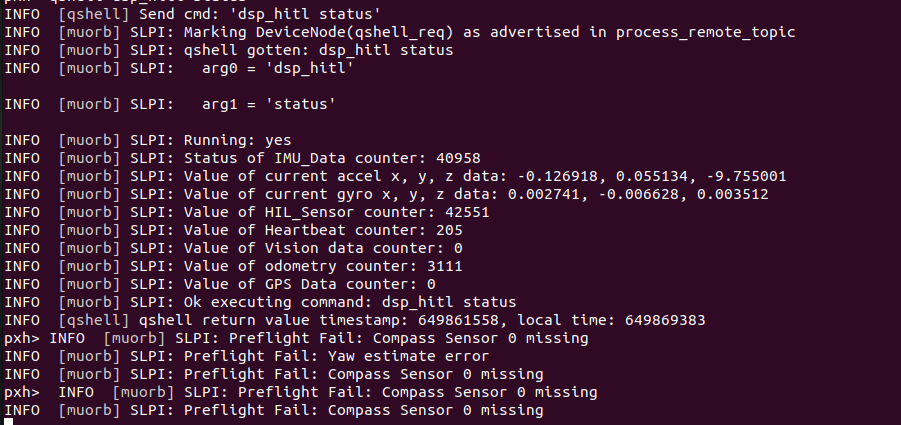
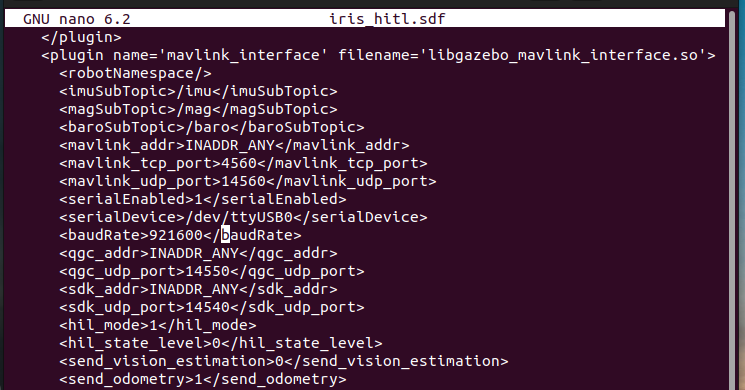
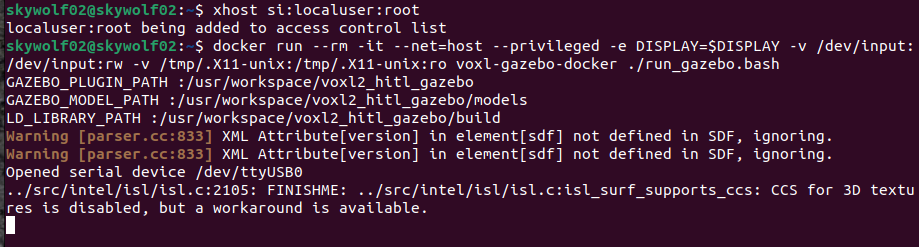
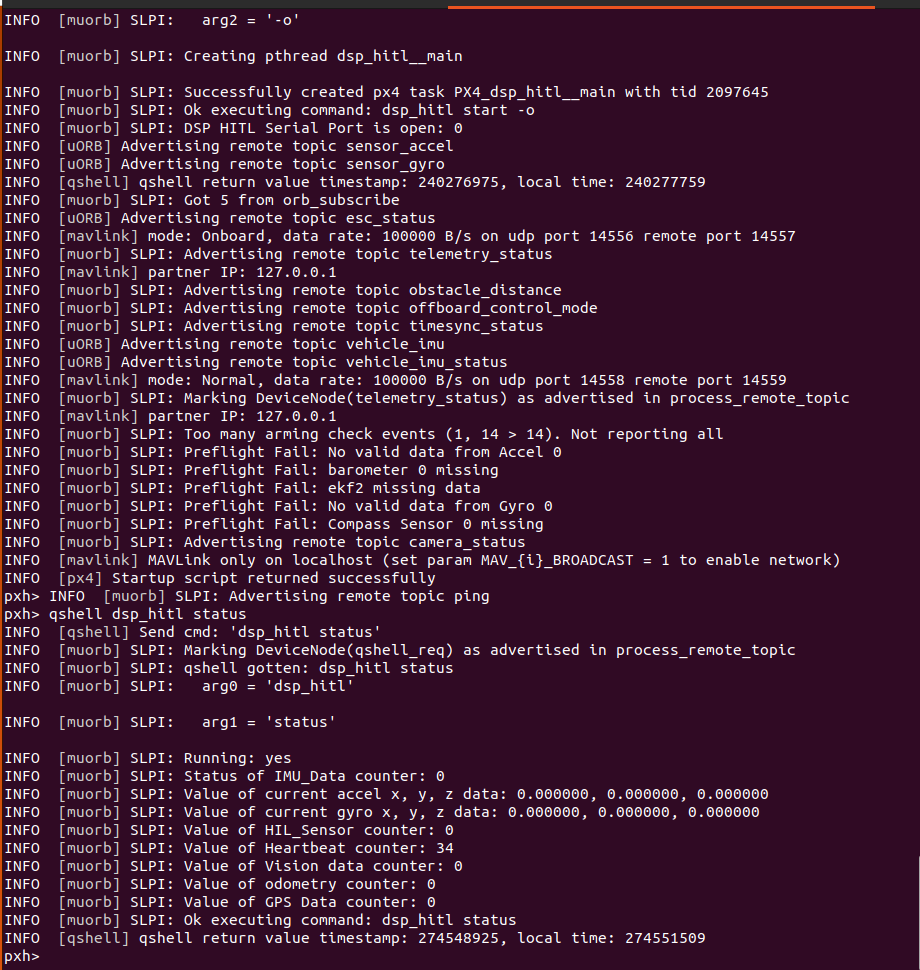
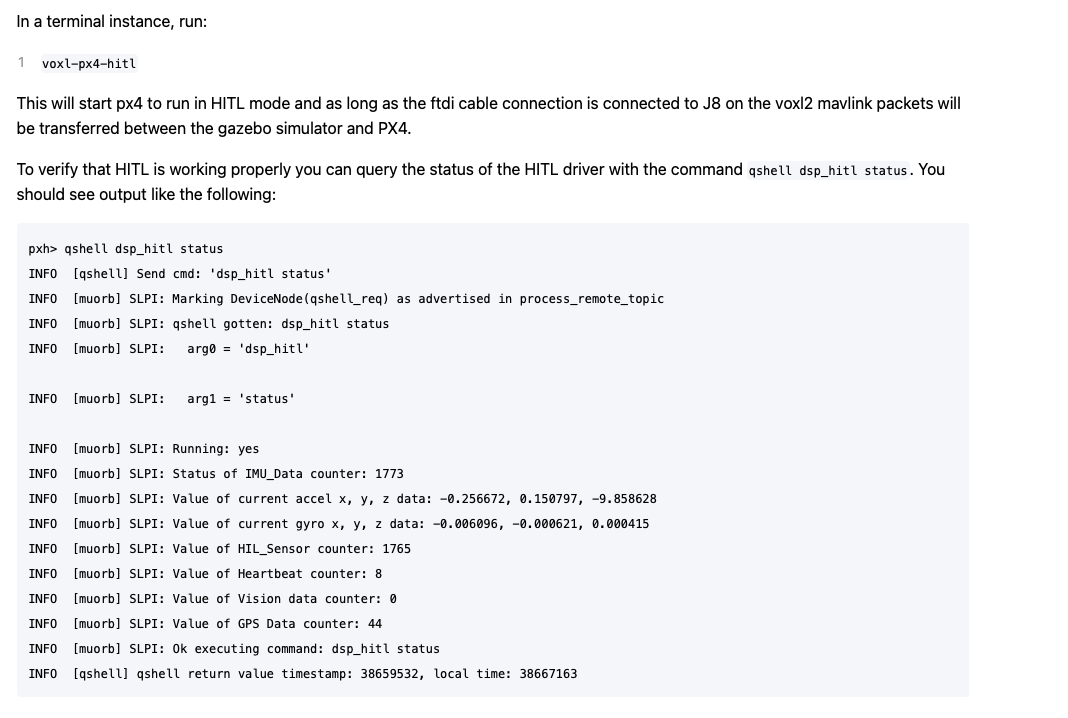
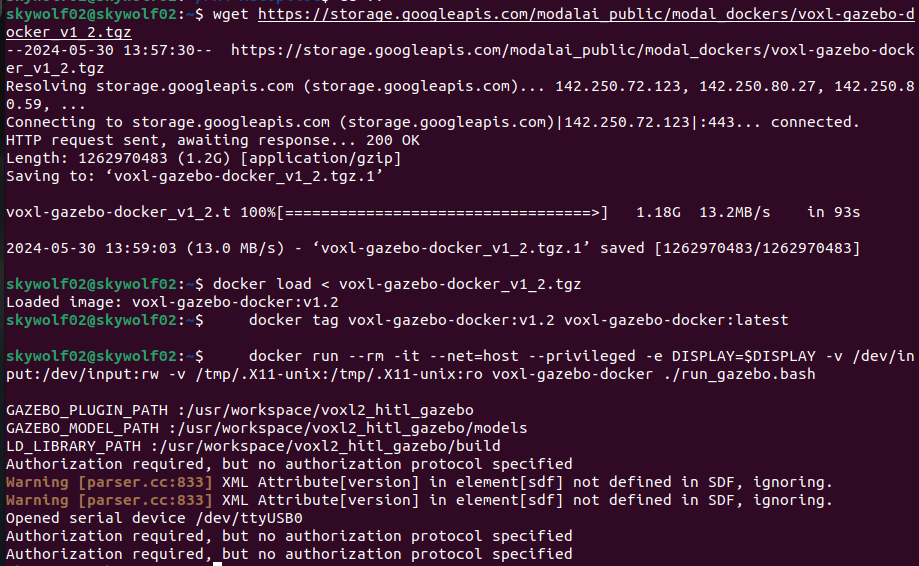
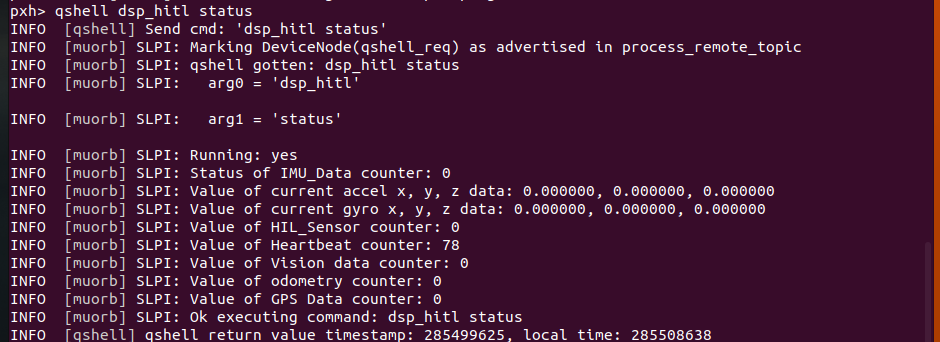
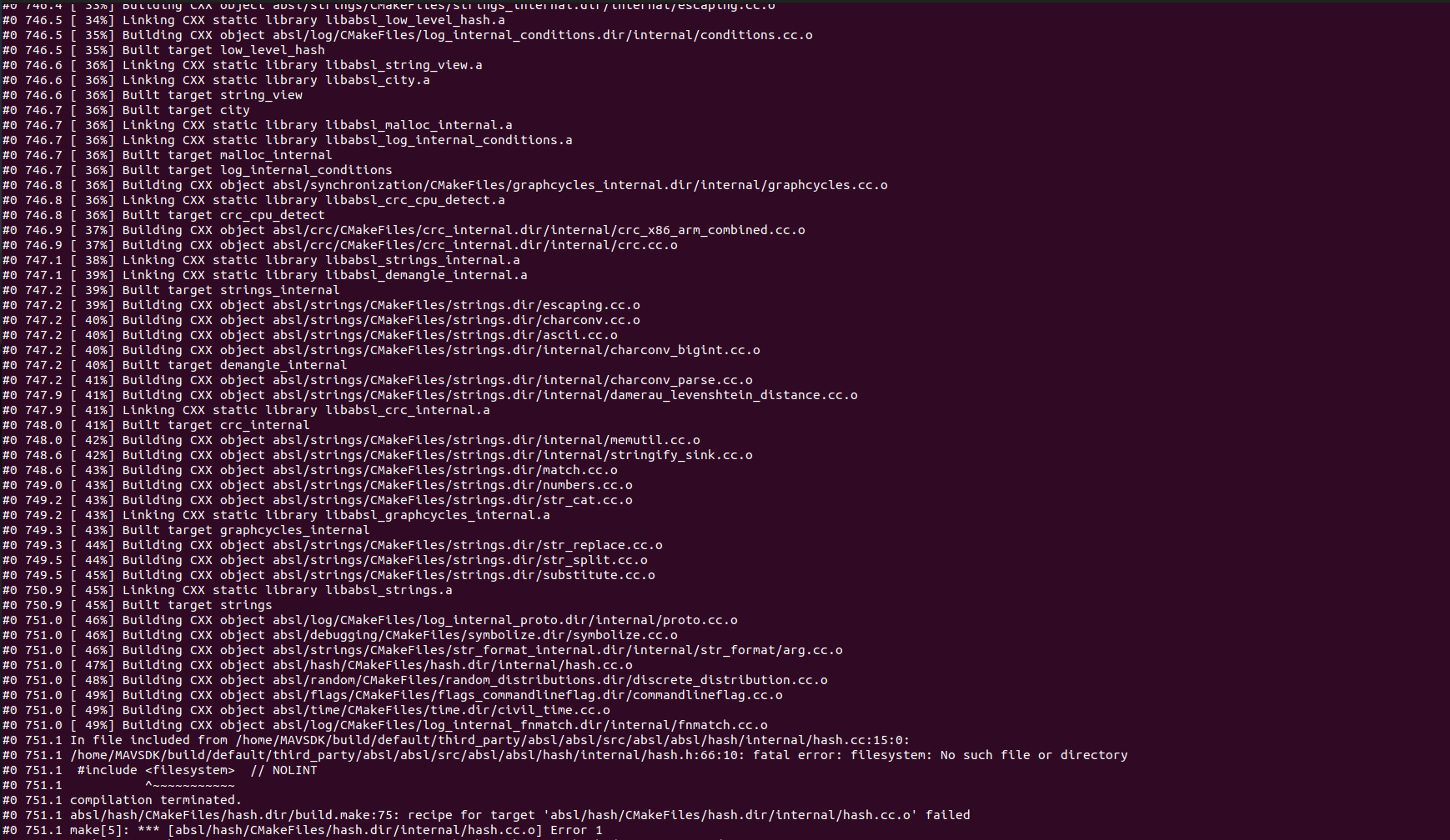
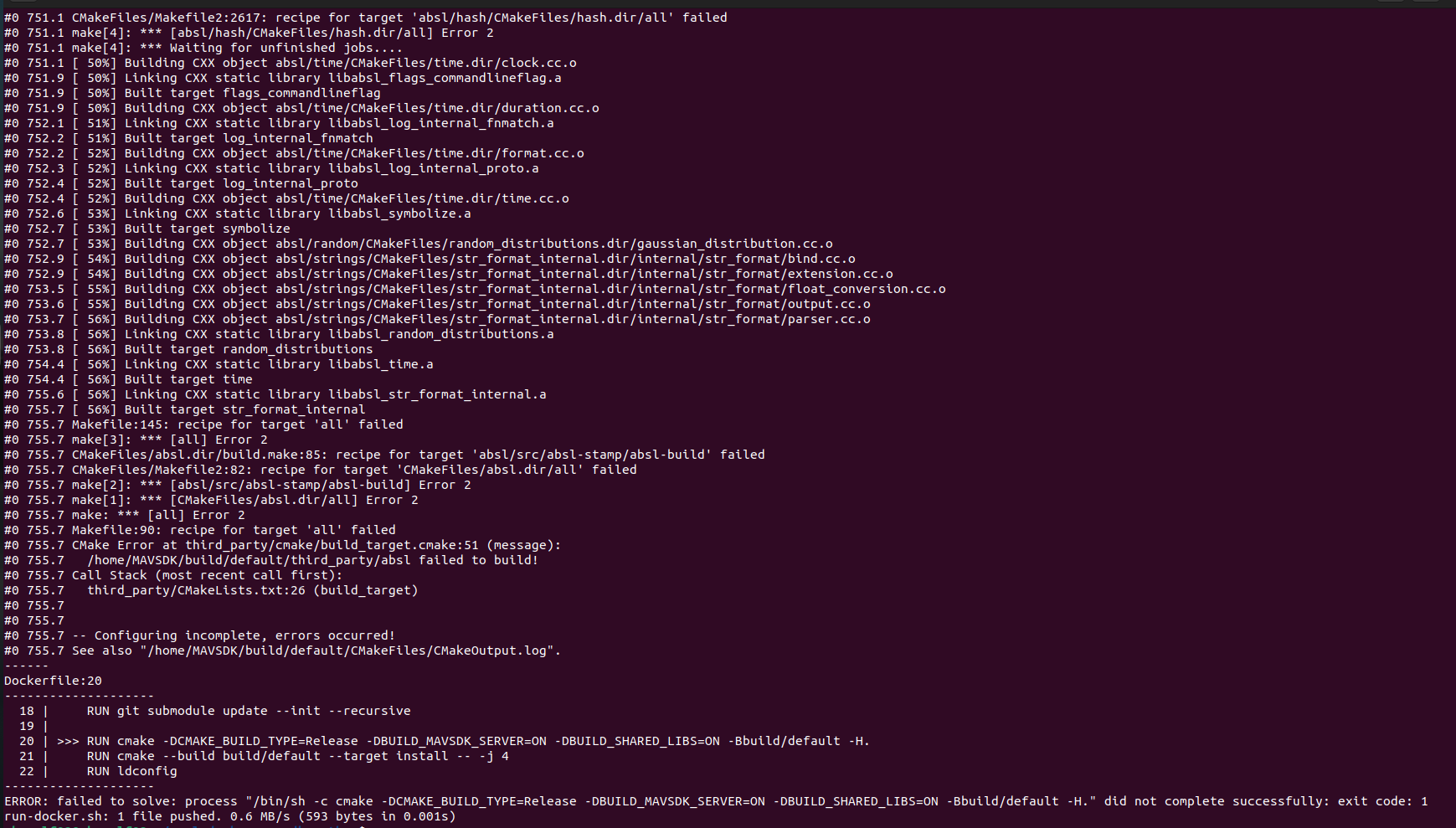
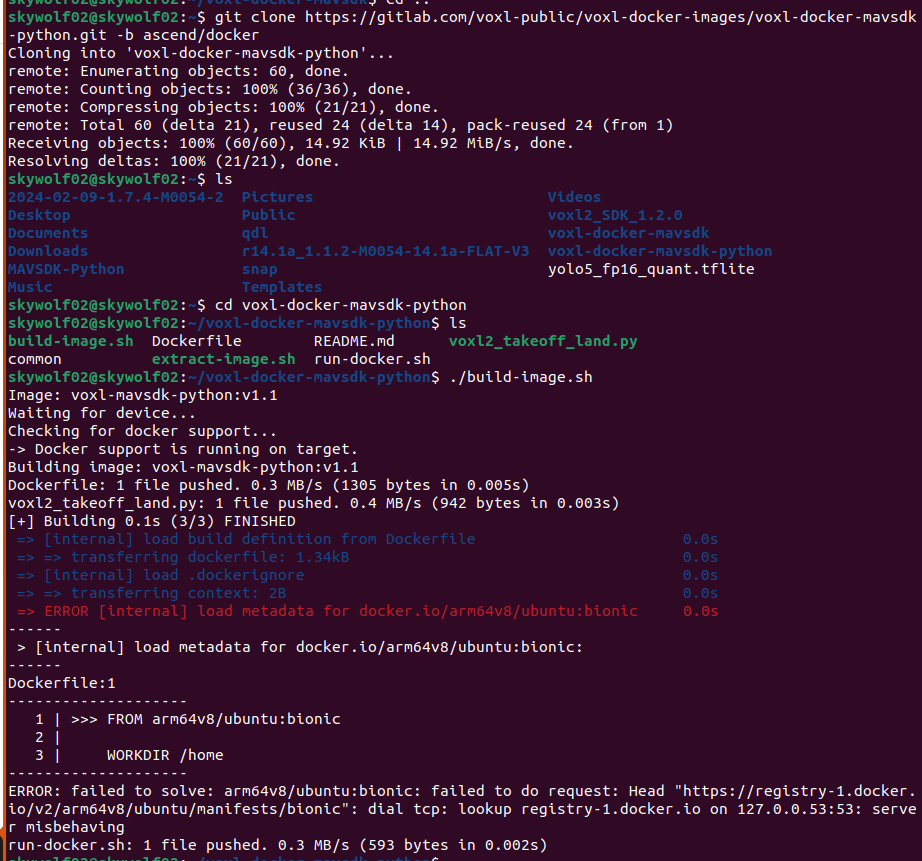
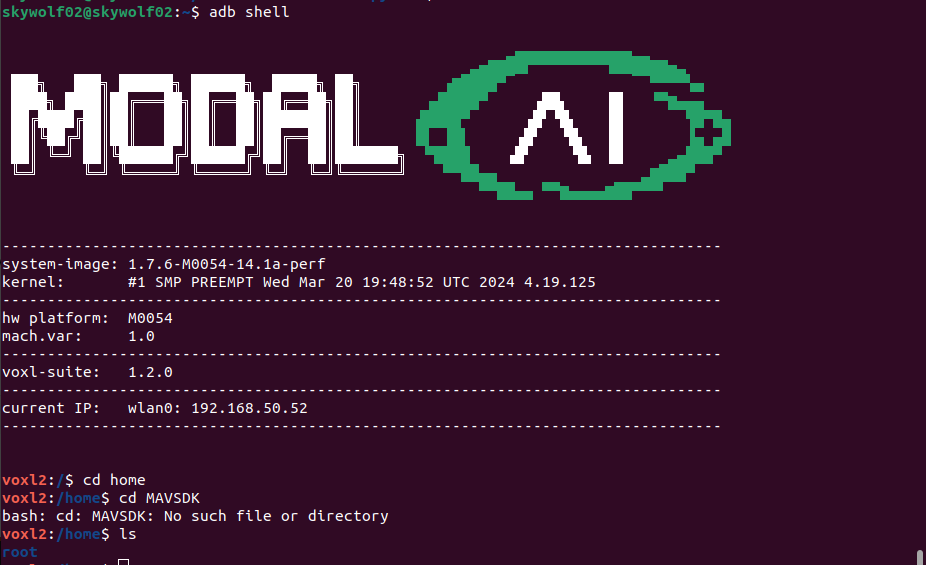
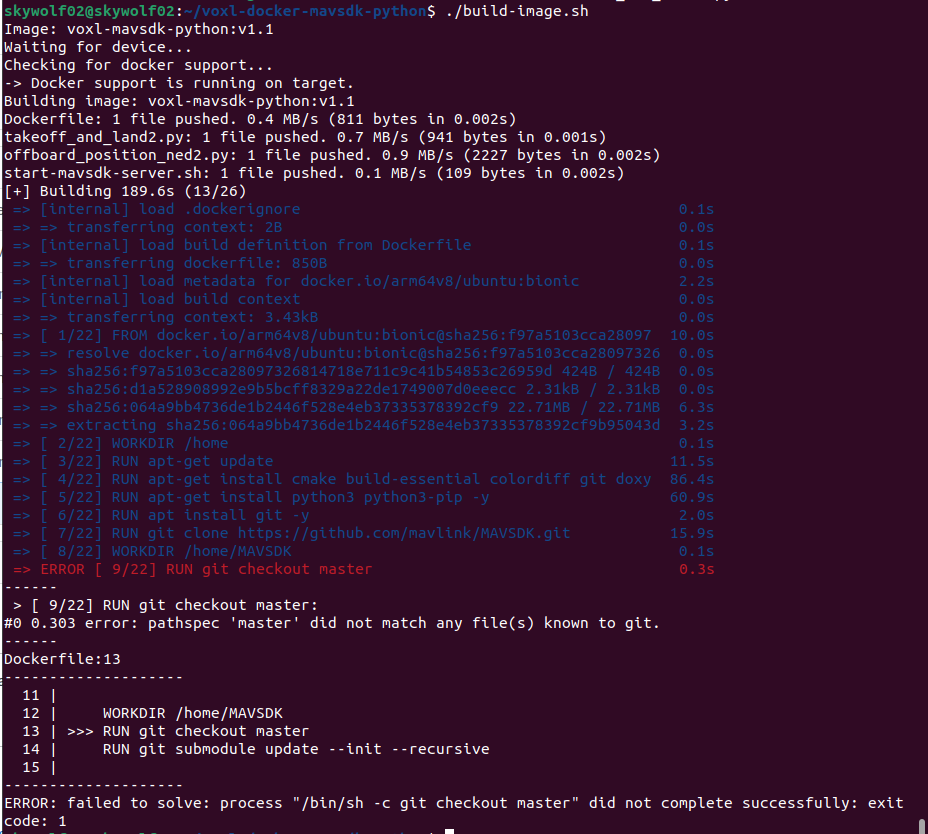
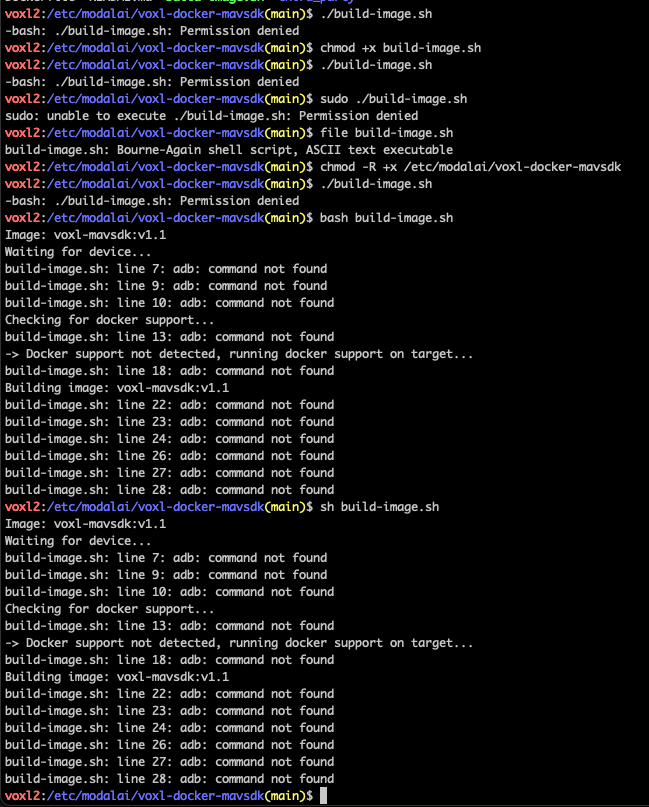
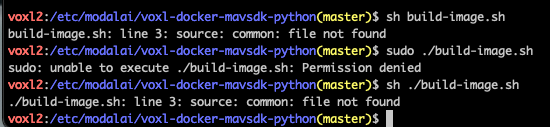
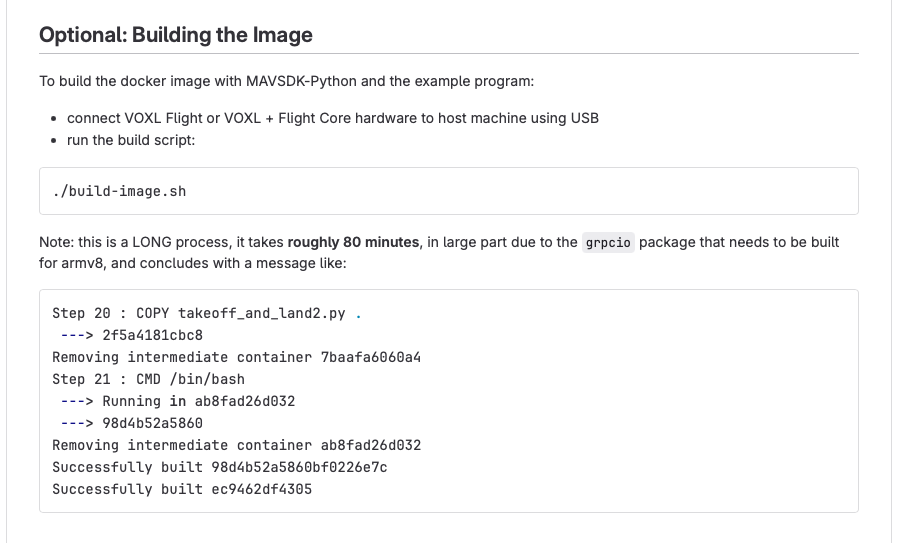
We switched some of the wires for the FTDI cable and now receiving data. We went back to following the HITL docs along with https://forum.modalai.com/topic/3511/serial-port-closed-and-other-hitl-errors/9 . We have the drone running in HITL via QGC and running the voxl-px4-hitl command. Despite this, gazebo is still not showing the drone or connecting. Could the issue possibly be with the Dockerfile that reflects bionic instead of focal since that had to be changed for the image to be pulled? We also tried running ./run-docker.sh within the directory and received docker run --help.
 This is from the ascend branch
This is from the ascend branch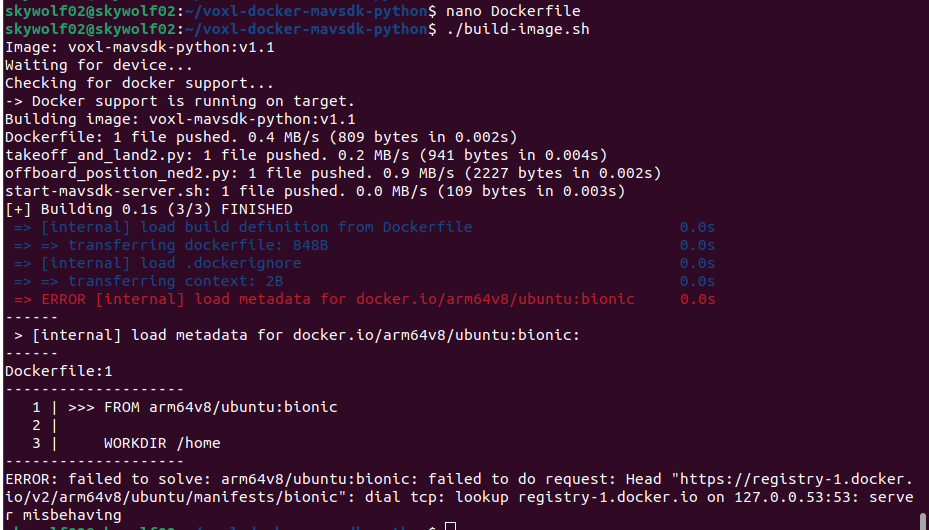

{kind=link}