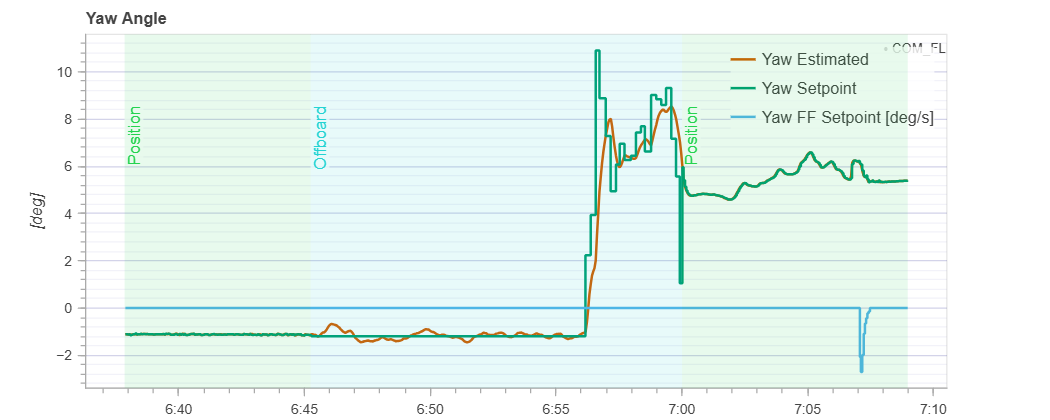
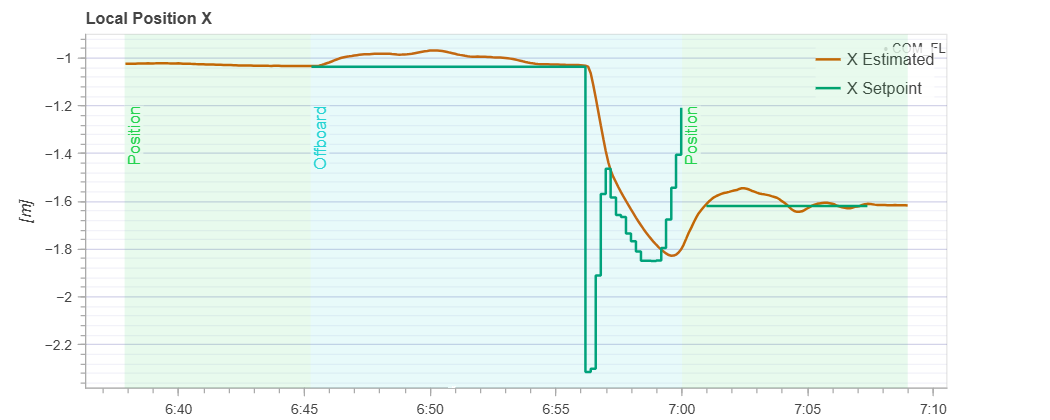
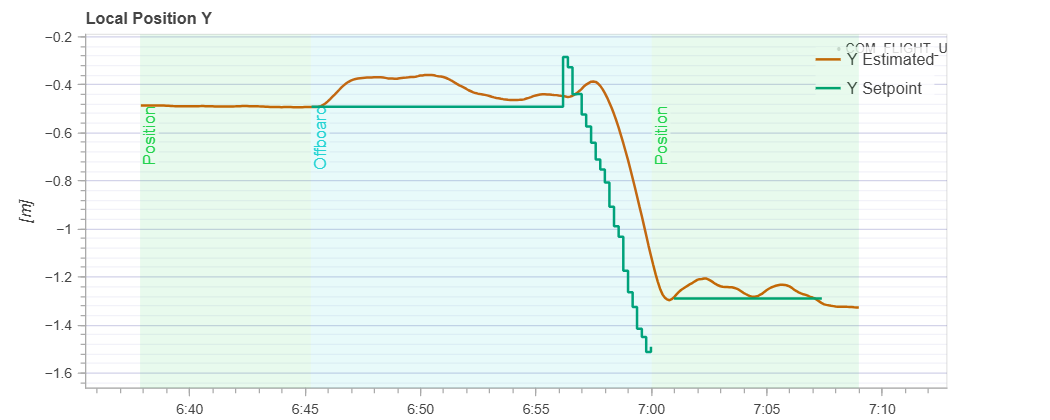
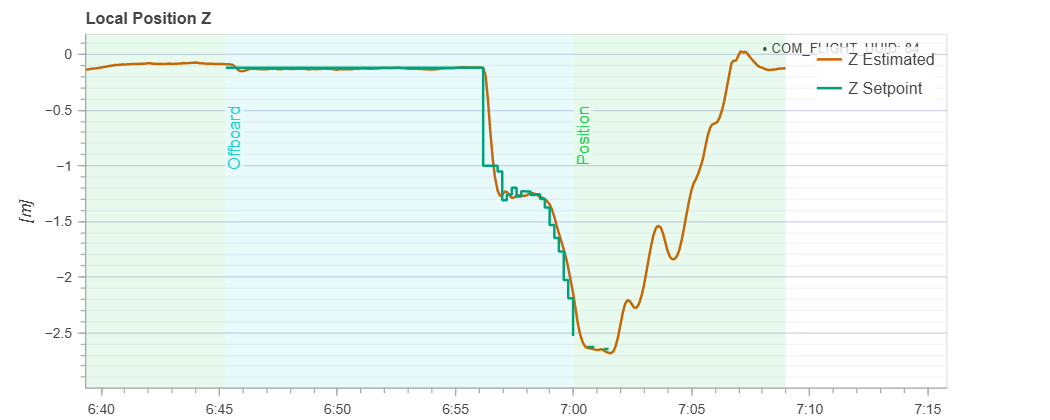
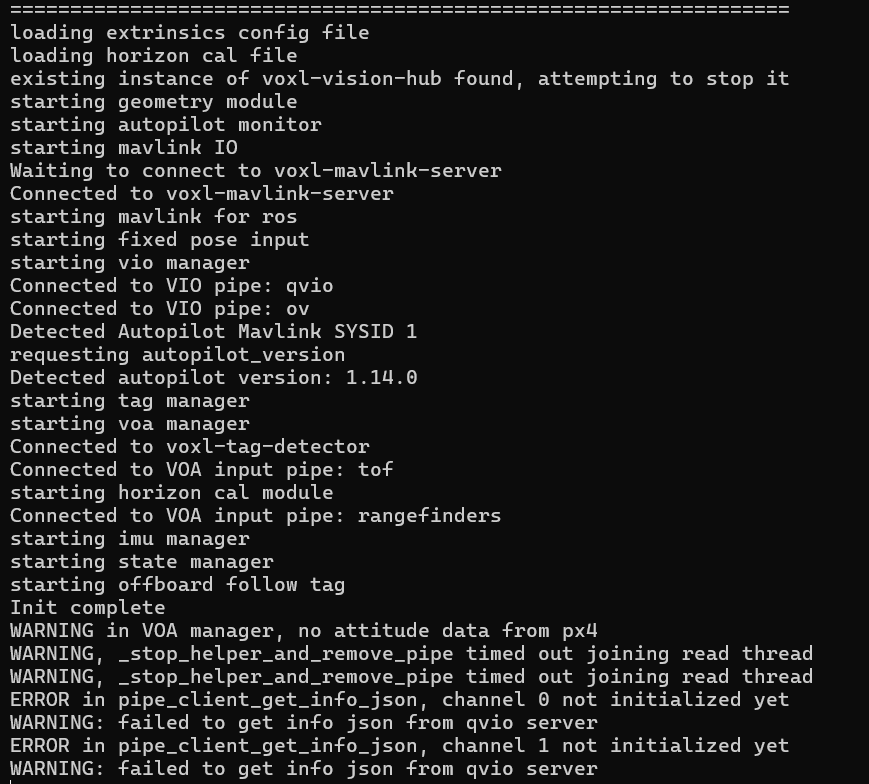
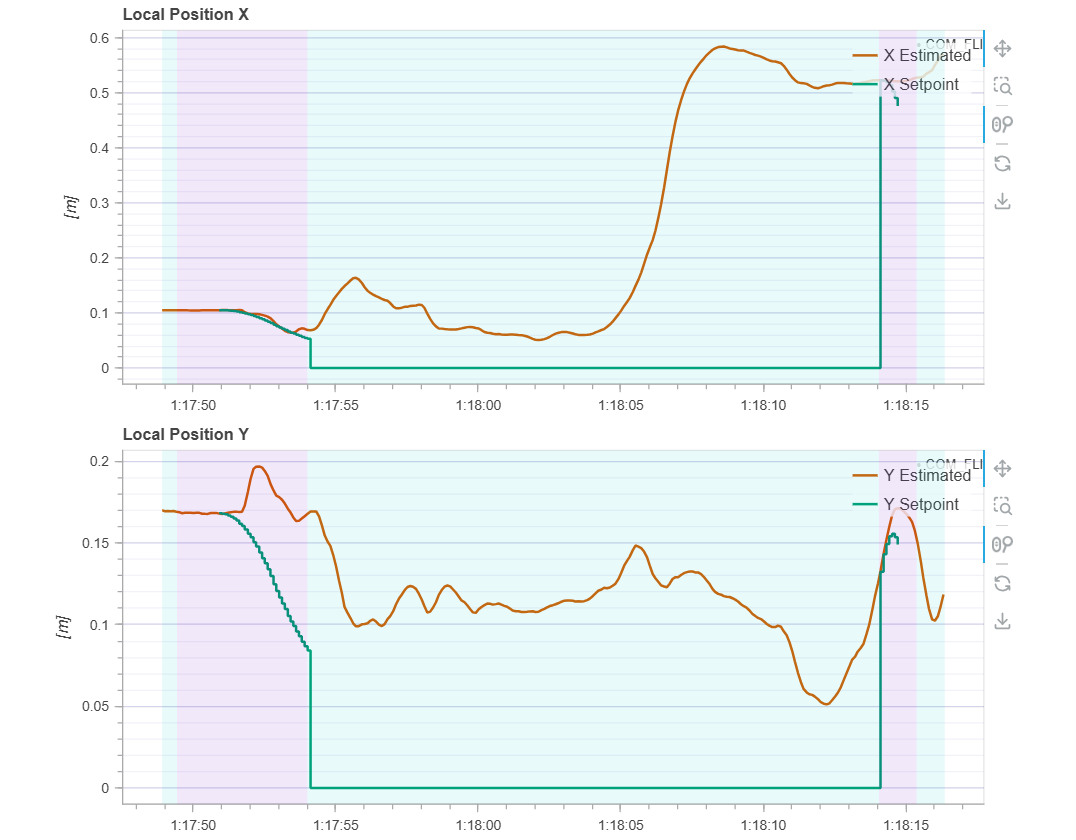
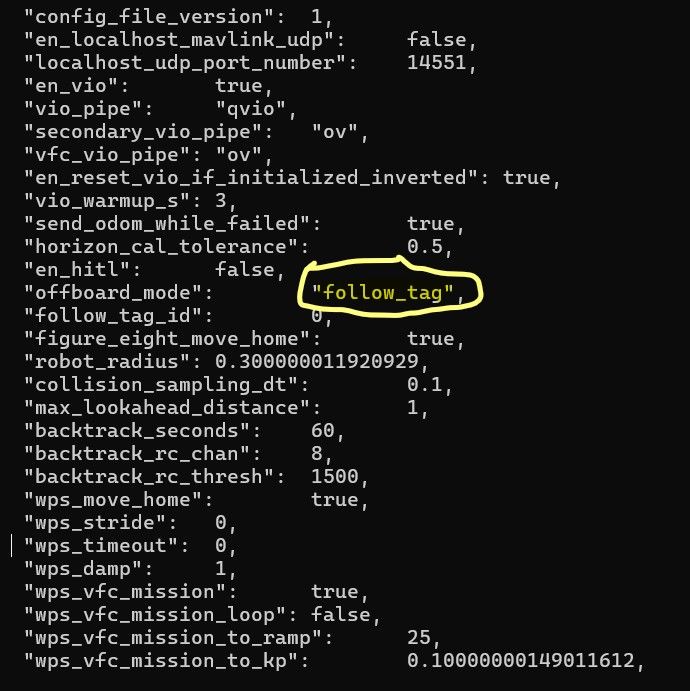
@ApoorvThapliyal, with the setting you provided, I tried flying with propellers on in offboard mode. Once I armed and switched to offboard mode, the drone took off and stayed at around 10 cm height for 10 seconds. During that time, it didn't detect AprilTag and failed to align, as the height was too low for detection. However, after 10 seconds, it suddenly began to gain height, and as it approached the ceiling, I took control and landed. From the log file, we can see that the drone was attempting to align its X and Y positions with AprilTag; however, the issue was that the Z setpoints continually decreased. Can you please help me solve this?
Additionally, it would be more beneficial if we could run it using MAVSDK and customize it for our specific code.