VOXL Mini 4 in 1 ESC query
-
Hello community,
We are working on VOXL2 and we have Mini 4 in 1 ESC with us with in-built power module. On its datasheet page there is no mention of its continous and peak current support per channel. My UAV needs hover time 5 Amp of current per channel and in worst case scenerio at full throttle/max thrust it might shoot to maximum of 12 Amp. Will this requirement be catered by this ESC? -
Hello community,
We are working on VOXL2 and we have Mini 4 in 1 ESC with us with in-built power module. On its datasheet page there is no mention of its continous and peak current support per channel. My UAV needs hover time 5 Amp of current per channel and in worst case scenerio at full throttle/max thrust it might shoot to maximum of 12 Amp. Will this requirement be catered by this ESC?Hi @Aaky
You just went one page in too far")
https://docs.modalai.com/voxl-escs/
Hope this helps! -
Hi @Aaky
You just went one page in too far
https://docs.modalai.com/voxl-escs/
Hope this helps!@Aaky , 5A hover / 12A max (per motor) should be easy for M0129 in terms of current capacity. Just make sure you have some cooling. Sufficient cooling should be determined by testing and monitoring ESC temps, which are available in the ESC telemetry and PX4.
Alex
-
@Aaky , 5A hover / 12A max (per motor) should be easy for M0129 in terms of current capacity. Just make sure you have some cooling. Sufficient cooling should be determined by testing and monitoring ESC temps, which are available in the ESC telemetry and PX4.
Alex
@Vinny Thank you pointing that out.
")
@Alex-Kushleyev Thank you for your inputs. Can you please review once my tuning xml for for following propulsion : EMAX Eco ii 2306 motor 1700 kv, 5126 GemFan bi-blade propeller and 4S 15000 mah battery pack. All up weight of my UAV is 1800 grams. We did tuning of ESC as mentioned in the tuning guide.
Tuning file link : https://drive.google.com/file/d/11D6HuHfLuBnW2HNoYhLyWO13bDPDH-Qz/view?usp=sharing
-
@Vinny Thank you pointing that out.
@Alex-Kushleyev Thank you for your inputs. Can you please review once my tuning xml for for following propulsion : EMAX Eco ii 2306 motor 1700 kv, 5126 GemFan bi-blade propeller and 4S 15000 mah battery pack. All up weight of my UAV is 1800 grams. We did tuning of ESC as mentioned in the tuning guide.
Tuning file link : https://drive.google.com/file/d/11D6HuHfLuBnW2HNoYhLyWO13bDPDH-Qz/view?usp=sharing
Hi @Aaky, can you please confirm which ESC you are using for this drone? This thread is related to the mini ESC, and i just want to make sure that you are not using that for the relatively heavy drone.
Alex
-
Hi @Aaky, can you please confirm which ESC you are using for this drone? This thread is related to the mini ESC, and i just want to make sure that you are not using that for the relatively heavy drone.
Alex
-
@Alex-Kushleyev I am using VOXL ESC 4 in 1 present over this link.
Hi @Aaky ,
The documentation for the mini ESC states that we recommend using this ESC for drones 750g or less. It seems your UAV weight is around 1800g.

VOXL Mini 4-in-1 ESC Datasheet
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
I am concerned that the ESC may overheat (even though sustained current capacity may still be ok). Also, for larger motor like 2206, you may need to add a bypass capacitor to the ESC power ensure stable performance.
Have you performed tests of sustained hover thrust to see what the ESC temperature is like after several minutes of continuous "hover" thrust?
Alex
-
Hi @Aaky ,
The documentation for the mini ESC states that we recommend using this ESC for drones 750g or less. It seems your UAV weight is around 1800g.
VOXL Mini 4-in-1 ESC Datasheet
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
I am concerned that the ESC may overheat (even though sustained current capacity may still be ok). Also, for larger motor like 2206, you may need to add a bypass capacitor to the ESC power ensure stable performance.
Have you performed tests of sustained hover thrust to see what the ESC temperature is like after several minutes of continuous "hover" thrust?
Alex
@Alex-Kushleyev Here is short flight log. We are able to hover but UAV needs tuning. Please specify concerns if any from ESC perspective.
Link: https://review.px4.io/plot_app?log=192f9c98-a3b0-48c9-b438-e6f290ed3f43 -
@Alex-Kushleyev Here is short flight log. We are able to hover but UAV needs tuning. Please specify concerns if any from ESC perspective.
Link: https://review.px4.io/plot_app?log=192f9c98-a3b0-48c9-b438-e6f290ed3f43Hi @Aaky ,
I looked at the log using our customized version of flight-review (https://github.com/modalai/px4-flight-review), which you can run locally on your linux machine (the custom version of flight-review provides additional plots related to ESC and some other fields).
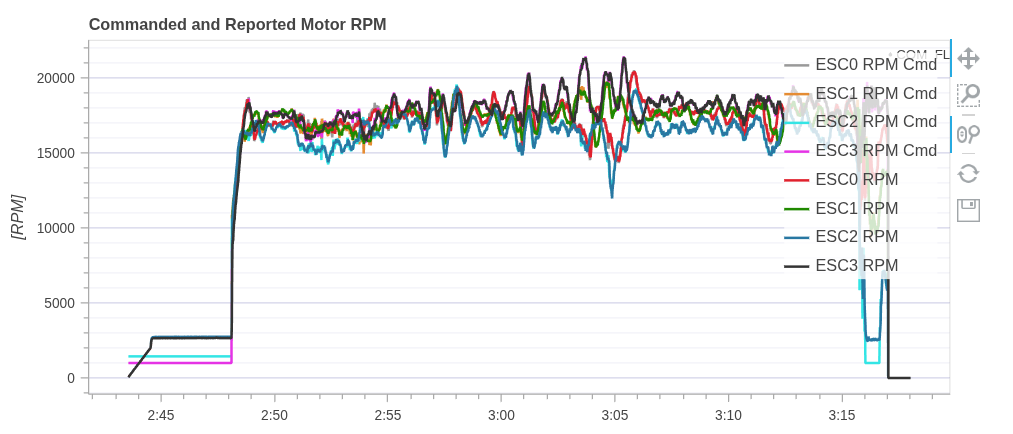
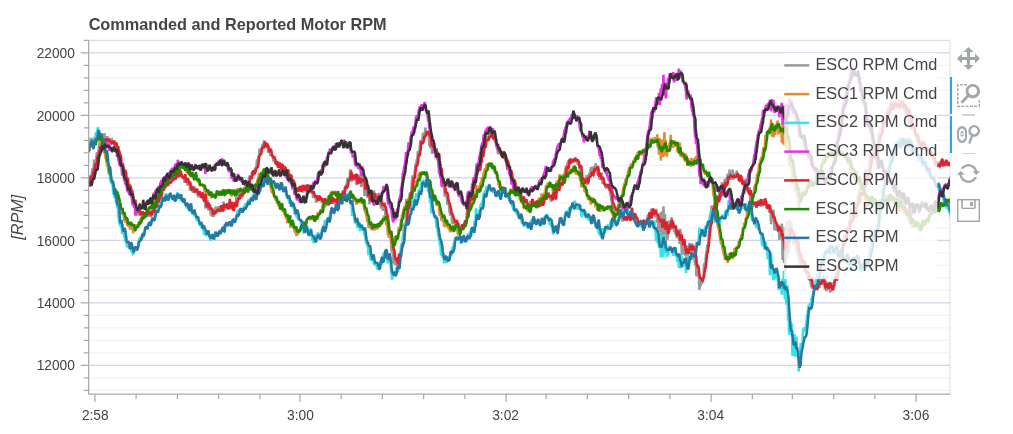
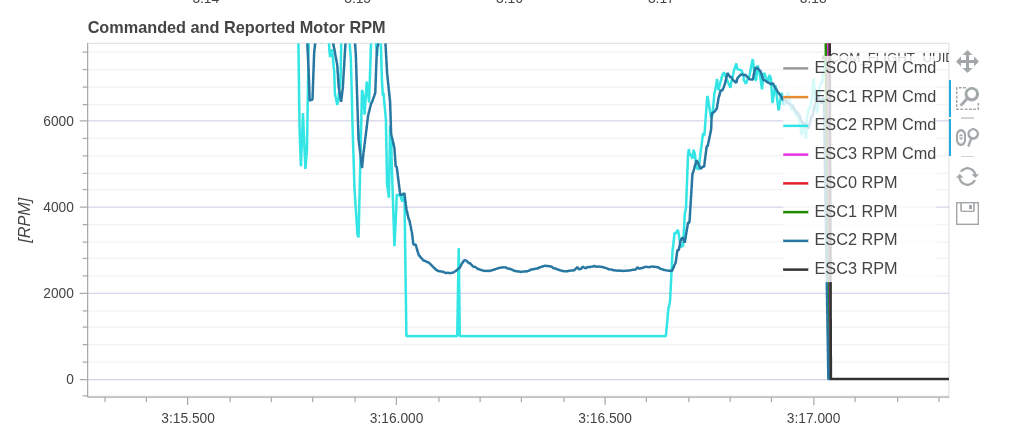
The RPM tracking looks good - tight tracking and not a lot of noise in commands (meaning IMU is well isolated, there are no significant vibrations or esc-induced oscillations).
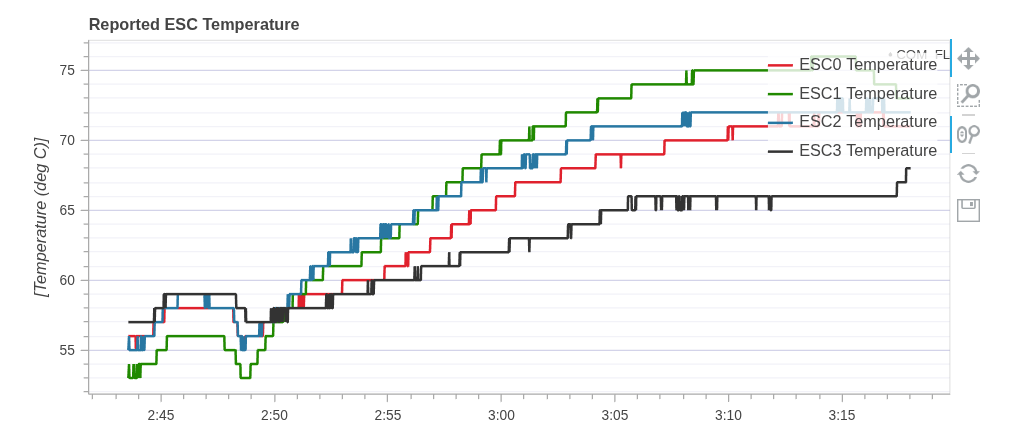
ESC temps are ok (although this is a pretty short test!)
Power
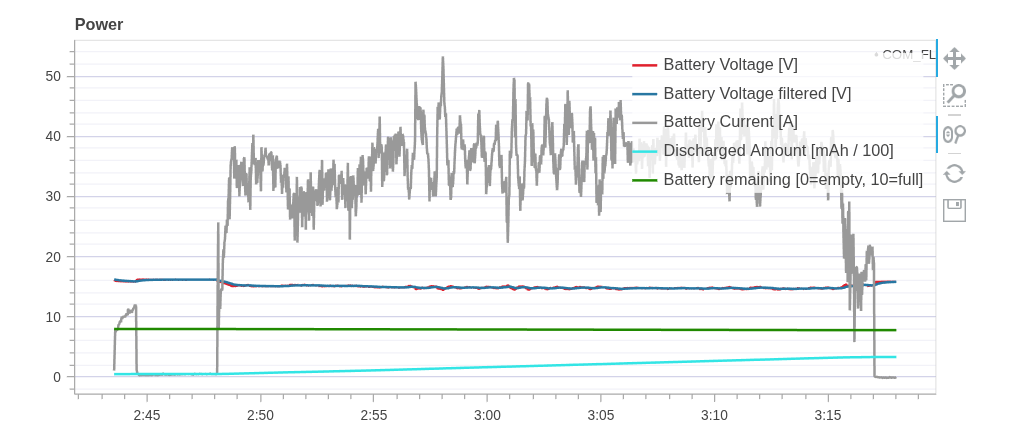
The total battery current seems to be around 35A, meaning 8-9A per motor, which is still a very comfortable load for this ESC, as long as you can keep the ESC temperature not exceeding 100C (it should still run OK at 125C and higher, but that's definitely not recommended, and if you have to do that for short bursts, it may be ok). Unless you are trying to push the performance to the limit somehow, stay below 90-100C for the ESC temps. You can also significantly help with ESC cooling by adding a heat spreader to significantly increase the thermal mass of the ESC (which is very low, since the board is so tiny). Adding a heat spreader will make the cooling more efficient.
You should double check your PX4 params for min and max rpm to match what you have in the ESC params, since at the end it seems that PX4 is sending a low RPM that is not achievable by the ESC:
Since we are talking about ESC temps, you can actually set up a parameter to send a warning or critical message (which you should see in QGC) for different ESC temperature thresholds : https://github.com/modalai/px4-firmware/blob/voxl-dev/src/drivers/actuators/voxl_esc/voxl_esc_params.c#L249. Just for full disclosure, we don't test this PX4 feature frequently, but my understanding is that if you hit the warning threshold, QGC should show a warning and CRITICAL limit may actually cause a behavior change in PX4, I am not sure. The ESC driver in PX4 just sends out a warning message, but how it is handled is up to PX4.
Honestly I don't really see any issues with this setup, even though it is heavier than I would recommend for this ESC. I would suggest that you slowly build up confidence in this setup and start flying a bit more aggressively and checking the log for the metrics i mentioned in this post and checking ESC temps.
Alex
-
Hi @Aaky ,
I looked at the log using our customized version of flight-review (https://github.com/modalai/px4-flight-review), which you can run locally on your linux machine (the custom version of flight-review provides additional plots related to ESC and some other fields).
The RPM tracking looks good - tight tracking and not a lot of noise in commands (meaning IMU is well isolated, there are no significant vibrations or esc-induced oscillations).
ESC temps are ok (although this is a pretty short test!)
Power
The total battery current seems to be around 35A, meaning 8-9A per motor, which is still a very comfortable load for this ESC, as long as you can keep the ESC temperature not exceeding 100C (it should still run OK at 125C and higher, but that's definitely not recommended, and if you have to do that for short bursts, it may be ok). Unless you are trying to push the performance to the limit somehow, stay below 90-100C for the ESC temps. You can also significantly help with ESC cooling by adding a heat spreader to significantly increase the thermal mass of the ESC (which is very low, since the board is so tiny). Adding a heat spreader will make the cooling more efficient.
You should double check your PX4 params for min and max rpm to match what you have in the ESC params, since at the end it seems that PX4 is sending a low RPM that is not achievable by the ESC:
Since we are talking about ESC temps, you can actually set up a parameter to send a warning or critical message (which you should see in QGC) for different ESC temperature thresholds : https://github.com/modalai/px4-firmware/blob/voxl-dev/src/drivers/actuators/voxl_esc/voxl_esc_params.c#L249. Just for full disclosure, we don't test this PX4 feature frequently, but my understanding is that if you hit the warning threshold, QGC should show a warning and CRITICAL limit may actually cause a behavior change in PX4, I am not sure. The ESC driver in PX4 just sends out a warning message, but how it is handled is up to PX4.
Honestly I don't really see any issues with this setup, even though it is heavier than I would recommend for this ESC. I would suggest that you slowly build up confidence in this setup and start flying a bit more aggressively and checking the log for the metrics i mentioned in this post and checking ESC temps.
Alex
@Alex-Kushleyev Thanks for detailed information and analysis. I am going ahead with further testing with this ESC as per your suggestion.
I have changed my propulsion system as follows: Emax Eco II seroes 2306 2400kv motor, propeller Gemfan 5177 and 15000 mah 4S battery.
Here is my file with ESC calibration : https://drive.google.com/file/d/1uzbx9MGwF1EvRqJx6tXBqqc-j3XZSgu_/view?usp=sharing
All the motor directions are checked and they are correct as per airframe reference. My UAV is able to takeoff a bit but at around 0.5 meters it again decreases its altitude and then after scratching the surface is flipping over.
Here is the logs : https://review.px4.io/plot_app?log=08691d7d-887d-41d8-b00d-d543febeea59
Can you spot is my ESC configuration wrong or anything I am missing in PX4 configuration? This flip happened twice in a row and all motor direction are verified to be correct since UAV is able to takeoff. Also any advantage of RPM vs PWM control in VOXL ESC PX4 parameter setup?
Also my voxl2 is unpside down so I have set ROLL_180 in Autopilot orientation, but is this creating some problem anywhere is unknown since I can see yaw reset EKF2 estimator flag set as soon as I takeoff.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login