Lumenier RID & M10Q GPS Module compatibility
-
@Alex-May The driver for that magnetometer has not been built into the image so it won't work without adding that driver. As for GPS it seems like it isn't communicating with the receiver. Can you run this experiment: Stop PX4 with
systemctl stop voxl-px4, wait a couple of seconds, then start px4 from the command line withvoxl-px4 -dand post the output from that? -
@psafi Yes, unfortunately it is a real pain to get the SDK from Qualcomm and you need that version.
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
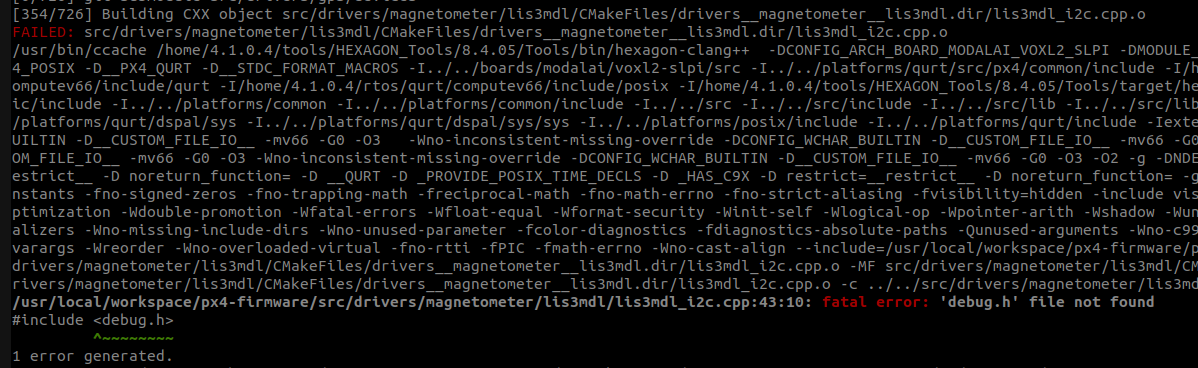
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
-
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
@psafi Looks like it will compile if you comment out the
#include <debug.h>lines in both lis3mdl_i2c.cpp and lis3mdl_spi.cpp -
@Eric-Katzfey I am able to build voxl-px4 now.
I am following instructions outlined here to add this magnetometer:
https://forum.modalai.com/post/16770I am adding following line:
CONFIG_DRIVERS_MAGNETOMETER_LIS3MDL=yto this file:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/default.px4boardwhen I attempt to build px4 I get the following error from the driver module:
@psafi Those should only be there on the Nuttx platform.
-
@psafi Looks like it will compile if you comment out the
#include <debug.h>lines in both lis3mdl_i2c.cpp and lis3mdl_spi.cpp@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
-
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi If you disable the px4 service (
systemctl stop voxl-px4) and then start it from the command line (voxl-px4 -d) what output do you get? And if you disconnect the magnetometer from the system how does that change things? Remove the start command from voxl-px4-start and enter it after px4 starts from the command prompt to see what happens. -
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi And how did you load your updated build to the VOXL 2?
-
@Eric-Katzfey I did that and was able to build and install new px4. Thank you!
Sill not detecting lis3mdl module on the px4 side.
I tried adding the following to /usr/bin/voxl-px4-start
qshell lis3mdl start -R 10 -X -b 1but I think that causes px4 service fail to start. Not sure if that means the module has not been successfully added to voxl-px4 or some other issue.
Are there any steps I need to take besides adding sensor name to default.px4board file?
@psafi I just built voxl-px4 with the lis3mdl driver and when I run it the command fails because it fails the probe (I don't have that magnetometer) but otherwise runs normally.
-
@psafi And how did you load your updated build to the VOXL 2?
@Eric-Katzfey by installing debian package and I got output similar to this after installation:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-px4#deployment -
@psafi If you disable the px4 service (
systemctl stop voxl-px4) and then start it from the command line (voxl-px4 -d) what output do you get? And if you disconnect the magnetometer from the system how does that change things? Remove the start command from voxl-px4-start and enter it after px4 starts from the command prompt to see what happens.@Eric-Katzfey I did the systemctl stop and started service again. I guess rebooting the board earlier did not have the same effect. The compass calibration in Q is working now (no more "no mag found" error) which I guess it means the mag is working now and our gps is working too.
here is the output of voxl-p4 -d by the way:
INFO [qshell] Send cmd: 'lis3mdl start -R 10 -X -b 1' INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] [qshell] qshell gotten: lis3mdl start -R 10 -X -b 1 INFO [muorb] [qshell] arg0 = 'lis3mdl' INFO [muorb] [qshell] arg1 = 'start' INFO [muorb] [qshell] arg2 = '-R' INFO [muorb] [qshell] arg3 = '10' INFO [muorb] [qshell] arg4 = '-X' INFO [muorb] [qshell] arg5 = '-b' INFO [muorb] [qshell] arg6 = '1' INFO [muorb] [drivers__device] *** I2C Device ID 0x51e09 335369 INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1 INFO [muorb] lis3mdl #0 on I2C bus 1 INFO [muorb] (external) INFO [muorb] address 0x1E INFO [muorb] rotation 10 INFO [muorb] INFO [muorb] [qshell] Ok executing command: lis3mdl start -R 10 -X -b 1
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login