MAVROS not connecting to FCU on m500
-
Hi again!
I am trying to run mavros on VOXL on the m500 and I have been following the tutorial given here. The output when I run do./run_mavros.shis as shown here
... logging to /root/.ros/log/0c573912-1dda-11b2-b775-ec5c68cd236d/roslaunch-apq8096-2040.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://192.168.8.1:49495/
SUMMARY
CLEAR PARAMETERS
- /mavros/
PARAMETERS
- /mavros/cmd/use_comp_id_system_control: False
- /mavros/conn/heartbeat_rate: 1.0
- /mavros/conn/system_time_rate: 1.0
- /mavros/conn/timeout: 10.0
- /mavros/conn/timesync_rate: 10.0
- /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
- /mavros/distance_sensor/hrlv_ez4_pub/id: 0
- /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
- /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
- /mavros/distance_sensor/laser_1_sub/id: 3
- /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
- /mavros/distance_sensor/laser_1_sub/subscriber: True
- /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
- /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
- /mavros/distance_sensor/lidarlite_pub/id: 1
- /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
- /mavros/distance_sensor/lidarlite_pub/send_tf: True
- /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
- /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
- /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
- /mavros/distance_sensor/sonar_1_sub/id: 2
- /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
- /mavros/distance_sensor/sonar_1_sub/subscriber: True
- /mavros/fake_gps/eph: 2.0
- /mavros/fake_gps/epv: 2.0
- /mavros/fake_gps/fix_type: 3
- /mavros/fake_gps/geo_origin/alt: 408.0
- /mavros/fake_gps/geo_origin/lat: 47.3667
- /mavros/fake_gps/geo_origin/lon: 8.55
- /mavros/fake_gps/gps_rate: 5.0
- /mavros/fake_gps/mocap_transform: True
- /mavros/fake_gps/satellites_visible: 5
- /mavros/fake_gps/tf/child_frame_id: fix
- /mavros/fake_gps/tf/frame_id: map
- /mavros/fake_gps/tf/listen: False
- /mavros/fake_gps/tf/rate_limit: 10.0
- /mavros/fake_gps/tf/send: False
- /mavros/fake_gps/use_mocap: True
- /mavros/fake_gps/use_vision: False
- /mavros/fcu_protocol: v2.0
- /mavros/fcu_url: udp://127.0.0.1:1...
- /mavros/gcs_url:
- /mavros/global_position/child_frame_id: base_link
- /mavros/global_position/frame_id: map
- /mavros/global_position/gps_uere: 1.0
- /mavros/global_position/rot_covariance: 99999.0
- /mavros/global_position/tf/child_frame_id: base_link
- /mavros/global_position/tf/frame_id: map
- /mavros/global_position/tf/global_frame_id: earth
- /mavros/global_position/tf/send: False
- /mavros/global_position/use_relative_alt: True
- /mavros/image/frame_id: px4flow
- /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0...
- /mavros/imu/frame_id: base_link
- /mavros/imu/linear_acceleration_stdev: 0.0003
- /mavros/imu/magnetic_stdev: 0.0
- /mavros/imu/orientation_stdev: 1.0
- /mavros/landing_target/camera/fov_x: 2.0071286398
- /mavros/landing_target/camera/fov_y: 2.0071286398
- /mavros/landing_target/image/height: 480
- /mavros/landing_target/image/width: 640
- /mavros/landing_target/land_target_type: VISION_FIDUCIAL
- /mavros/landing_target/listen_lt: False
- /mavros/landing_target/mav_frame: LOCAL_NED
- /mavros/landing_target/target_size/x: 0.3
- /mavros/landing_target/target_size/y: 0.3
- /mavros/landing_target/tf/child_frame_id: camera_center
- /mavros/landing_target/tf/frame_id: landing_target
- /mavros/landing_target/tf/listen: False
- /mavros/landing_target/tf/rate_limit: 10.0
- /mavros/landing_target/tf/send: True
- /mavros/local_position/frame_id: map
- /mavros/local_position/tf/child_frame_id: base_link
- /mavros/local_position/tf/frame_id: map
- /mavros/local_position/tf/send: False
- /mavros/local_position/tf/send_fcu: False
- /mavros/mission/pull_after_gcs: True
- /mavros/mocap/use_pose: True
- /mavros/mocap/use_tf: False
- /mavros/odometry/fcu/odom_child_id_des: base_link
- /mavros/odometry/fcu/odom_parent_id_des: map
- /mavros/plugin_blacklist: ['safety_area', '...
- /mavros/plugin_whitelist: []
- /mavros/px4flow/frame_id: px4flow
- /mavros/px4flow/ranger_fov: 0.118682
- /mavros/px4flow/ranger_max_range: 5.0
- /mavros/px4flow/ranger_min_range: 0.3
- /mavros/safety_area/p1/x: 1.0
- /mavros/safety_area/p1/y: 1.0
- /mavros/safety_area/p1/z: 1.0
- /mavros/safety_area/p2/x: -1.0
- /mavros/safety_area/p2/y: -1.0
- /mavros/safety_area/p2/z: -1.0
- /mavros/setpoint_accel/send_force: False
- /mavros/setpoint_attitude/reverse_thrust: False
- /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
- /mavros/setpoint_attitude/tf/frame_id: map
- /mavros/setpoint_attitude/tf/listen: False
- /mavros/setpoint_attitude/tf/rate_limit: 50.0
- /mavros/setpoint_attitude/use_quaternion: False
- /mavros/setpoint_position/mav_frame: LOCAL_NED
- /mavros/setpoint_position/tf/child_frame_id: target_position
- /mavros/setpoint_position/tf/frame_id: map
- /mavros/setpoint_position/tf/listen: False
- /mavros/setpoint_position/tf/rate_limit: 50.0
- /mavros/setpoint_raw/thrust_scaling: 1.0
- /mavros/setpoint_velocity/mav_frame: LOCAL_NED
- /mavros/startup_px4_usb_quirk: True
- /mavros/sys/disable_diag: False
- /mavros/sys/min_voltage: 10.0
- /mavros/target_component_id: 1
- /mavros/target_system_id: 1
- /mavros/tdr_radio/low_rssi: 40
- /mavros/time/time_ref_source: fcu
- /mavros/time/timesync_avg_alpha: 0.6
- /mavros/time/timesync_mode: MAVLINK
- /mavros/vibration/frame_id: base_link
- /mavros/vision_pose/tf/child_frame_id: vision_estimate
- /mavros/vision_pose/tf/frame_id: odom
- /mavros/vision_pose/tf/listen: False
- /mavros/vision_pose/tf/rate_limit: 10.0
- /mavros/vision_speed/listen_twist: True
- /mavros/vision_speed/twist_cov: True
- /mavros/wheel_odometry/child_frame_id: base_link
- /mavros/wheel_odometry/count: 2
- /mavros/wheel_odometry/frame_id: odom
- /mavros/wheel_odometry/send_raw: True
- /mavros/wheel_odometry/send_twist: False
- /mavros/wheel_odometry/tf/child_frame_id: base_link
- /mavros/wheel_odometry/tf/frame_id: odom
- /mavros/wheel_odometry/tf/send: False
- /mavros/wheel_odometry/use_rpm: False
- /mavros/wheel_odometry/vel_error: 0.1
- /mavros/wheel_odometry/wheel0/radius: 0.05
- /mavros/wheel_odometry/wheel0/x: 0.0
- /mavros/wheel_odometry/wheel0/y: -0.15
- /mavros/wheel_odometry/wheel1/radius: 0.05
- /mavros/wheel_odometry/wheel1/x: 0.0
- /mavros/wheel_odometry/wheel1/y: 0.15
- /rosdistro: kinetic
- /rosversion: 1.12.14
NODES
/
mavros (mavros/mavros_node)auto-starting new master
process[master]: started with pid [2050]
ROS_MASTER_URI=http://127.0.0.1:11311/setting /run_id to 0c573912-1dda-11b2-b775-ec5c68cd236d
process[rosout-1]: started with pid [2063]
started core service [/rosout]
process[mavros-2]: started with pid [2081]
[ INFO] [3426.096303900]: FCU URL: udp://127.0.0.1:14551@:14551
[ INFO] [3426.103686380]: udp0: Bind address: 127.0.0.1:14551
[ INFO] [3426.104249508]: GCS bridge disabled
[ INFO] [3426.137194964]: Plugin 3dr_radio loaded
[ INFO] [3426.146114065]: Plugin 3dr_radio initialized
[ INFO] [3426.146529380]: Plugin actuator_control loaded
[ INFO] [3426.167594784]: Plugin actuator_control initialized
[ INFO] [3426.168073849]: Plugin altitude loaded
[ INFO] [3426.173392987]: Plugin altitude initialized
[ INFO] [3426.174679971]: Plugin command loaded
[ INFO] [3426.217533648]: Plugin command initialized
[ INFO] [3426.218051879]: Plugin ftp loaded
[ INFO] [3426.262606814]: Plugin ftp initialized
[ INFO] [3426.263183066]: Plugin global_position loaded
[ INFO] [3426.403349147]: Plugin global_position initialized
[ INFO] [3426.405406343]: Plugin hil loaded
[ INFO] [3426.550259840]: Plugin hil initialized
[ INFO] [3426.552356359]: Plugin home_position loaded
[ INFO] [3426.584895147]: Plugin home_position initialized
[ INFO] [3426.586284216]: Plugin imu loaded
[ INFO] [3426.645288119]: Plugin imu initialized
[ INFO] [3426.647154846]: Plugin local_position loaded
[ INFO] [3426.697651837]: Plugin local_position initialized
[ INFO] [3426.699237990]: Plugin manual_control loaded
[ INFO] [3426.722194757]: Plugin manual_control initialized
[ INFO] [3426.723371793]: Plugin param loaded
[ INFO] [3426.742331303]: Plugin param initialized
[ INFO] [3426.743906883]: Plugin rc_io loaded
[ INFO] [3426.767917352]: Plugin rc_io initialized
[ INFO] [3426.768082457]: Plugin safety_area blacklisted
[ INFO] [3426.768497928]: Plugin setpoint_accel loaded
[ INFO] [3426.787777179]: Plugin setpoint_accel initialized
[ INFO] [3426.788179680]: Plugin setpoint_attitude loaded
[ INFO] [3426.855109035]: Plugin setpoint_attitude initialized
[ INFO] [3426.857526285]: Plugin setpoint_position loaded
[ INFO] [3426.985575542]: Plugin setpoint_position initialized
[ INFO] [3426.987834302]: Plugin setpoint_raw loaded
[ INFO] [3427.048711495]: Plugin setpoint_raw initialized
[ INFO] [3427.049813322]: Plugin setpoint_trajectory loaded
[ INFO] [3427.077156983]: Plugin setpoint_trajectory initialized
[ INFO] [3427.078320790]: Plugin setpoint_velocity loaded
[ INFO] [3427.122030304]: Plugin setpoint_velocity initialized
[ INFO] [3427.125250474]: Plugin sys_status loaded
[ INFO] [3427.205486606]: Plugin sys_status initialized
[ INFO] [3427.205882389]: Plugin sys_time loaded
[ INFO] [3427.242300308]: TM: Timesync mode: MAVLINK
[ INFO] [3427.250766699]: Plugin sys_time initialized
[ INFO] [3427.251244826]: Plugin vfr_hud loaded
[ INFO] [3427.255015832]: Plugin vfr_hud initialized
[ INFO] [3427.256062087]: Plugin waypoint loaded
[ INFO] [3427.285587164]: Plugin waypoint initialized
[ INFO] [3427.287675715]: Plugin wind_estimation loaded
[ INFO] [3427.293713085]: Plugin wind_estimation initialized
[ INFO] [3427.295370696]: Autostarting mavlink via USB on PX4
[ INFO] [3427.296400596]: Built-in SIMD instructions: ARM NEON
[ INFO] [3427.297354819]: Built-in MAVLink package version: 2019.12.30
[ INFO] [3427.298312532]: Known MAVLink dialects: common ardupilotmega ASLUAV autoquad icarous matrixpilot paparazzi slugs standard uAvionix ualbertaBut when I do
rostopic echo /mavros/stateI get the following output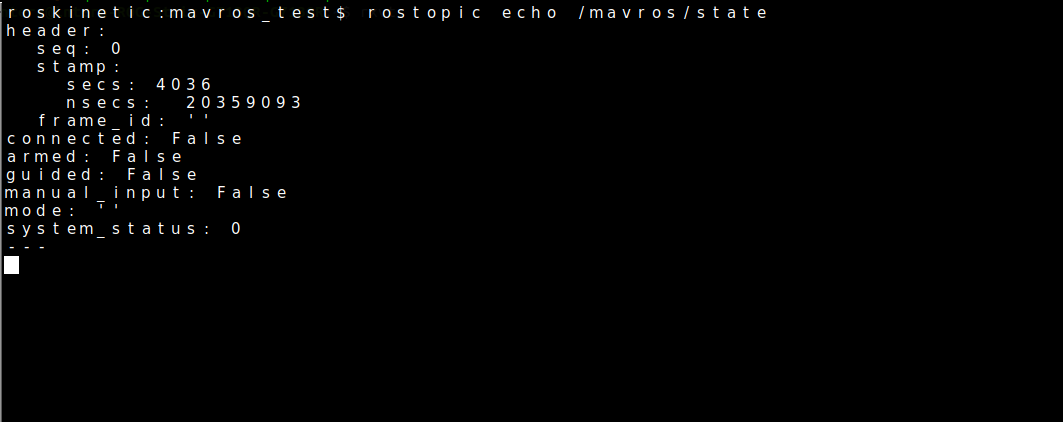
For your reference here are my
voxl-vision-px4.conffile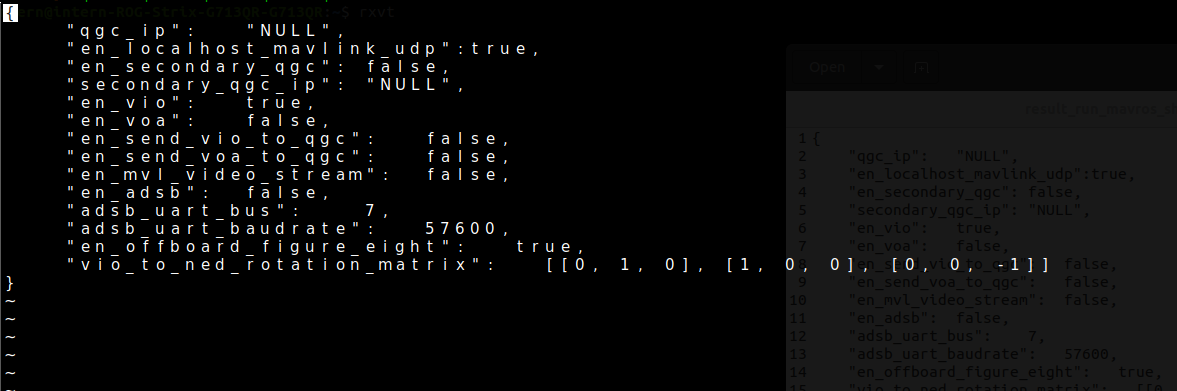
And here is myrun_mavros.shfile

As shown above, MAVROS is not connecting to FCU and as a result I am not getting anything on the
/mavros/local_position/poserostopic. Just FYI I am getting pose information in my QGC (in MAVLink Inspector) and it seemed to be accurate (moved approximately 1m forward and it was reflected in the QGC)Please let me know if you need any more information. Any insight into solving this would be greatly appreciated.
Thank you")
-
Have you followed the mavros tutorial here?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login