Poor GPS Fix
-
Re: GPS and VL53L1 not working
I'm having a similar issue with my PX4 Autonomy Developer Kit drone. A couple weeks ago, I took my drone out for a flight test and it never acquired any GPS satellites. Today I took it out to a parking lot with minimal sky obstructions and played around with the settings in QGC to see if I could get anything to track. The best I observed through the MavLink telemetry was the track of two satellites with valid PRN and SN values. I let the drone stay powered on for 15-30 minutes after various changes to allow time for the drone to self-download almanac (if it actually does it). Time does not seem to help at all.
Any help or insight would be appreciated!
When the drone boots up, here's the INFO that prints out from it:
[uORB] Advertising remote topic event
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: flight_mode_manager start
INFO [muorb] [qshell] arg0 = 'flight_mode_manager'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] [qshell] Ok executing command: flight_mode_manager start
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] [uORB] Advertising remote topic transponder_report
INFO [muorb] [uORB] Advertising remote topic rtl_time_estimate
INFO [muorb] [uORB] Advertising remote topic position_setpoint_triplet
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] [uORB] Advertising remote topic telemetry_status
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] [uORB] Advertising remote topic obstacle_distance
INFO [muorb] [uORB] Advertising remote topic vehicle_visual_odometry
INFO [muorb] [uORB] Advertising remote topic distance_sensor
INFO [muorb] [uORB] Advertising remote topic offboard_control_mode
INFO [muorb] [uORB] Advertising remote topic timesync_status
INFO [uORB] Advertising remote topic estimator_aid_src_rng_hgt
INFO [muorb] [uORB] Marking DeviceNode(vehicle_command_ack) as advertised in process_remote_topic
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] [uORB] Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [px4] Startup script returned successfully
INFO [logger] logger started (mode=all)
ERROR [muorb] [ekf2] ====> GLOBAL R to Earth: -152.495228 (42)
INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos
INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel
INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw
ERROR [muorb] [gps] GPS: failed to set baud rate 19200 on serial port
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] [uORB] Marking DeviceNode(vehicle_command_ack) as advertised in process_remote_topic
INFO [muorb] [gps] No COM port detected
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [muorb] [uORB] Advertising remote topic ping
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [gps] Got ack to initial CFG_VALSET!
INFO [muorb] [gps] u-blox firmware version: SPG 5.10
INFO [muorb] [gps] u-blox protocol version: 34.10
INFO [muorb] [gps] u-blox module: MAX-M10S
INFO [uORB] Advertising remote topic sensor_gps
INFO [uORB] Advertising remote topic satellite_info
INFO [uORB] Advertising remote topic mavlink_logAnd here is the voxl-px4 config file. The "EXTRA_STEPS" were added in after the fact while troubleshooting.
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=(
qshell gps start -d 7 -b 115200
)The drone is fairly new and the only "changes" made to it, outside of the GPS QGC settings I played around with, were by the direction of the bootcamp.
QGC GPS Settings Modified:
GPS_1_GNSS: 0* and 1
GPS_1_PROTOCOL: Auto Detect* and U-BLOX
GPS_SAT_INFO: ENABLED* and DISABLED
GPS_UBX_BAUD2: 230400, 115200*, 38400The configuration that got me two valid PRNs tracking have the * next to them.
And finally, here's a parse of the .ulg from the original test.
https://review.px4.io/plot_app?log=37983558-9d8c-4b27-b33e-84373301fca4The drone was started in Position mode, it appears that VIO was working fine and holding the drone in place until the altitude was increase beyond what the tracking camera could handle, fell back to altitude hold mode and started flying out of control. We did have a teather on it (just incase) so were able to reel it in and not lose it. Significant wind did pick up halfway through the flight, so I will attribute some of the chaos to that factor.
-

Starling 2 Max no GPS data
ModalAI Support, I received a new Starling 2 Max a few days ago, and overall it's great, but I'm having a problem with GPS. Basically, the drone appears to N...
ModalAI Forum (forum.modalai.com)
Just found this discussion and is likely the cause for my problems considering the two satellites I did track were right above me and still had very low SNR levels (20's). This seems like a pretty bad design flaw that should have been caught in testing. I'm going to try some testing and experimentation on my end to try and mitigate the EMI and will report back with any results that appear promising.
-
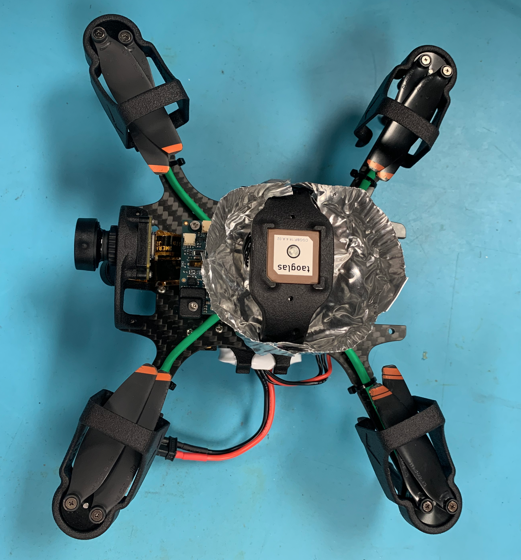
Building upon what @ROBERT-JUDD did in his testing, we made a shield out of a tinfoil solder cup to isolate the GPS antenna from the rest of the drone. This resulted in an almost immediate track of 10+ satellites. The EMI problem is real. We are now working on designing a 3D printable cone similar to what the cup is doing that we plan to paint with an EMI coating that will be our more rugged long term solution.
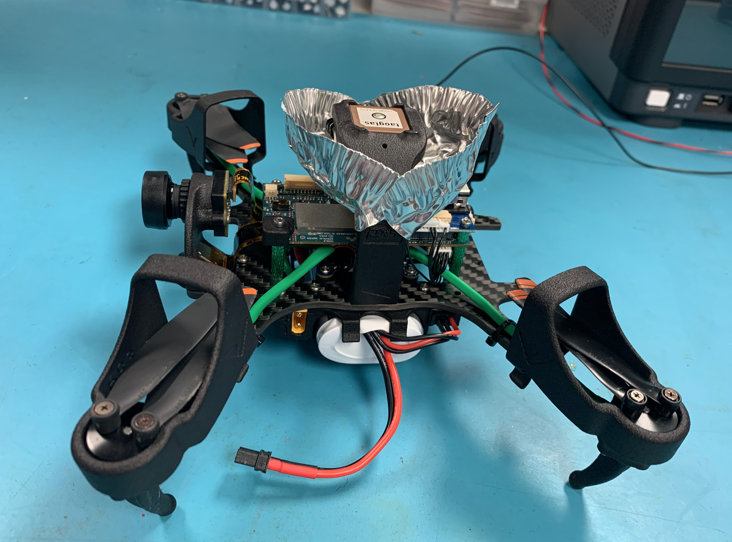
ModalAi should be providing clear disclaimers about this problem before people go and spend thousands on this drone!
-
Building upon what @ROBERT-JUDD did in his testing, we made a shield out of a tinfoil solder cup to isolate the GPS antenna from the rest of the drone. This resulted in an almost immediate track of 10+ satellites. The EMI problem is real. We are now working on designing a 3D printable cone similar to what the cup is doing that we plan to paint with an EMI coating that will be our more rugged long term solution.
ModalAi should be providing clear disclaimers about this problem before people go and spend thousands on this drone!
@somalley @Alex-Kushleyev Thanks for referring to my March 1, 2025 post regarding the GPS problem:
Starling 2 Max no GPS data
ModalAI Support, I received a new Starling 2 Max a few days ago, and overall it's great, but I'm having a problem with GPS. Basically, the drone appears to N...
ModalAI Forum (forum.modalai.com)
Overall I'm a big fan of ModalAI, but in my opinion this product contains a fundamental design flaw (complete loss of GPS position data due to EMI) that should have been detected and corrected early in the design testing phase. Moreover, that fatal design flaw has remained uncorrected for many months now, and I have received no information about if/when a permanent fix will be available. Our company spent over $5,000 on a Starling 2 Max, and it remains largely unusable due to this problem.
Alex Kushleyev at ModalAI has in general been very responsive, and has developed a temporary fix that customers can implement on their own, which I genuinely appreciate. But the fact remains that ModalAI inexcusably sold a product with a fundamental design flaw, and has not offered a permanent fix for many months now. In my opinion, at this point a permanent fix should be one of ModalAI's highest priority if they want to avoid a significant loss of customer confidence.
I would suggest that, as a first step, ModalAI should create a new post dedicated to providing ongoing fix updates and timelines, and to systematically update that post on the same day and time each week until a permanent fix is made available.
Thank you for your consideration.
Robert Judd
-
@somalley @Alex-Kushleyev Thanks for referring to my March 1, 2025 post regarding the GPS problem:
Starling 2 Max no GPS data
ModalAI Support, I received a new Starling 2 Max a few days ago, and overall it's great, but I'm having a problem with GPS. Basically, the drone appears to N...
ModalAI Forum (forum.modalai.com)
Overall I'm a big fan of ModalAI, but in my opinion this product contains a fundamental design flaw (complete loss of GPS position data due to EMI) that should have been detected and corrected early in the design testing phase. Moreover, that fatal design flaw has remained uncorrected for many months now, and I have received no information about if/when a permanent fix will be available. Our company spent over $5,000 on a Starling 2 Max, and it remains largely unusable due to this problem.
Alex Kushleyev at ModalAI has in general been very responsive, and has developed a temporary fix that customers can implement on their own, which I genuinely appreciate. But the fact remains that ModalAI inexcusably sold a product with a fundamental design flaw, and has not offered a permanent fix for many months now. In my opinion, at this point a permanent fix should be one of ModalAI's highest priority if they want to avoid a significant loss of customer confidence.
I would suggest that, as a first step, ModalAI should create a new post dedicated to providing ongoing fix updates and timelines, and to systematically update that post on the same day and time each week until a permanent fix is made available.
Thank you for your consideration.
Robert Judd
Hello @ROBERT-JUDD and @somalley ,
Thank you for following up and I appreciate your feedback. I have relayed your comments (again) to the team and will push to get the workaround out.
For Starling 2 Max, the workaround is to install a mast, so we are working on making those details available. Shielding the GPS receiver in the default location is not as effective. Please refer to the testing done with a mast in the center of the drone in this thread : https://forum.modalai.com/topic/4226/starling-2-max-no-gps-data/38 . However, the workaround is probably going to have the mast in the back of the Starling 2 Max.
For Starling 2, @somalley , a similar solution should be possible (with a mast). We are targeting the fix for the Starling 2 Max first, however you may be able to use the same approach (elevate the GPS receiver as well as getting it farther from the usb wifi dongle, which is right under the gps receiver, and seems to cause interference sometimes on Starling 2). We have seen improvement on Starling 2 when the wifi dongle is mounted elsewhere, but also elevating the GPS receiver should help as well as putting a small shield at the bottom.
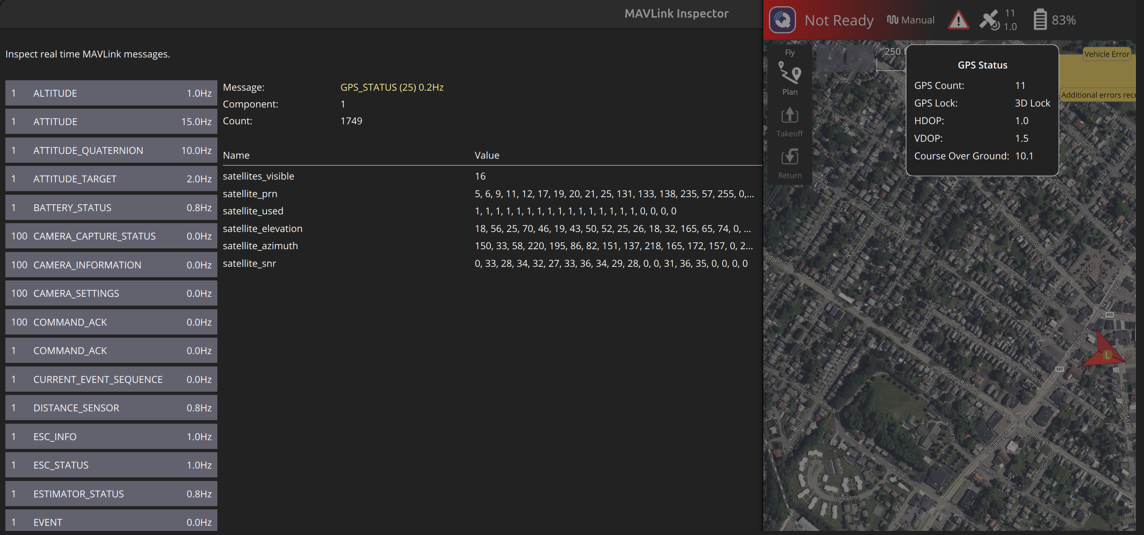
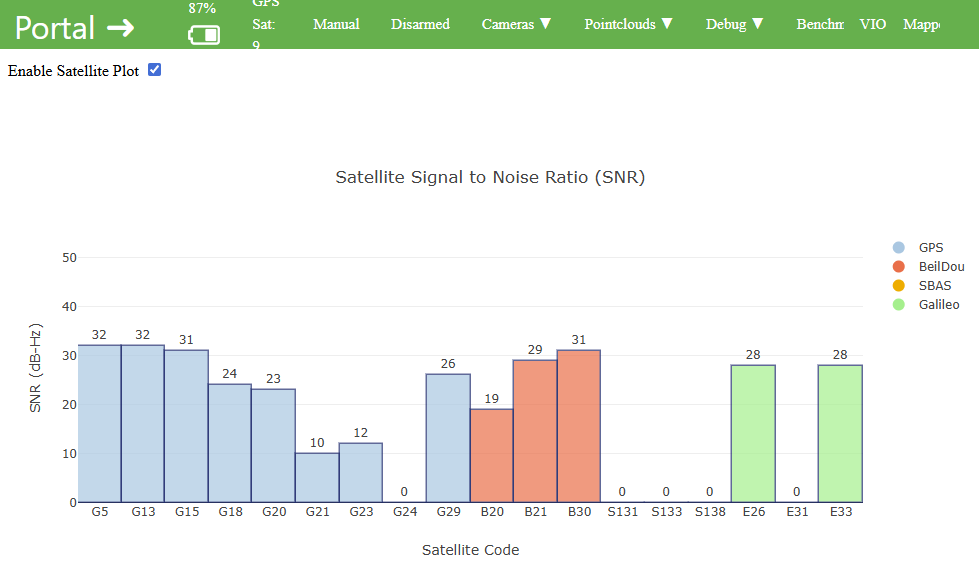
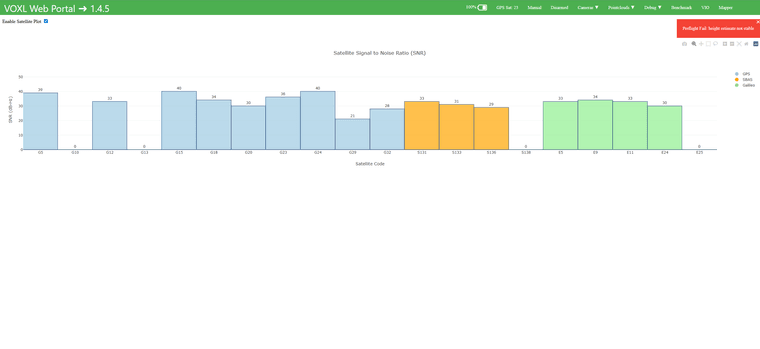
voxl-portal now supports displaying the GPS SNR, so it should be easier to validate the signal improvements based on SNR directly (as opposed to time to lock, etc).
Again, sorry for the inconvenience and I will check in a few days regarding the status of the workaround.
Alex
-
Hello @ROBERT-JUDD and @somalley ,
Thank you for following up and I appreciate your feedback. I have relayed your comments (again) to the team and will push to get the workaround out.
For Starling 2 Max, the workaround is to install a mast, so we are working on making those details available. Shielding the GPS receiver in the default location is not as effective. Please refer to the testing done with a mast in the center of the drone in this thread : https://forum.modalai.com/topic/4226/starling-2-max-no-gps-data/38 . However, the workaround is probably going to have the mast in the back of the Starling 2 Max.
For Starling 2, @somalley , a similar solution should be possible (with a mast). We are targeting the fix for the Starling 2 Max first, however you may be able to use the same approach (elevate the GPS receiver as well as getting it farther from the usb wifi dongle, which is right under the gps receiver, and seems to cause interference sometimes on Starling 2). We have seen improvement on Starling 2 when the wifi dongle is mounted elsewhere, but also elevating the GPS receiver should help as well as putting a small shield at the bottom.
voxl-portal now supports displaying the GPS SNR, so it should be easier to validate the signal improvements based on SNR directly (as opposed to time to lock, etc).
Again, sorry for the inconvenience and I will check in a few days regarding the status of the workaround.
Alex
Alex: Thanks for the reply. I tried to duplicate your workaround, see picture. The GPS signal did improve to the point where I could see 9-10 satellites, but I could not get a position lock and still could not fly.
Question: in the picture from your post (see below), what is the object that I've circled in blue? Is that something that might explain why your GPS signals are much better than mine?


-
Alex: Thanks for the reply. I tried to duplicate your workaround, see picture. The GPS signal did improve to the point where I could see 9-10 satellites, but I could not get a position lock and still could not fly.
Question: in the picture from your post (see below), what is the object that I've circled in blue? Is that something that might explain why your GPS signals are much better than mine?
PS there is a piece of copper foil under the GPS receiver, not visible in picture.
-
PS there is a piece of copper foil under the GPS receiver, not visible in picture.
Our team is getting together a GPS mast kit we can send out for testing on Starling 2 Max. I believe your name is already on the list to receive it.
Regarding your question, the item you circled in blue is a 6-pin connector board that allowed me to extend the short cable using another 6-pin cable. It is kind of bulky, so i just taped over it.
In your implementation, does that look like you have two antennas stacked on top of each other? Can you please elaborate?
Also, did you get a chance to try out the GPS signal viewer in the
voxl-portal? how high were your SNR during your test in open sky?Additionally, as i mentioned before, the proximity of RC transmitter (within < 2 meters) of the drone seems to decrease SNR, so please check that. It seems the RC transmitter is sending out signal outside of 900mhz band, which affects GPS.
Regarding the upgrade mast kit, i am also going to receive it and test it to confirm that it performs similarly to my initial mast.
I am going to perform some more testing in the next few days. I know there are a lot of factors that can affect the GPS signal, i will try to summarize them all in a shorter write-up.
Alex
-
Our team is getting together a GPS mast kit we can send out for testing on Starling 2 Max. I believe your name is already on the list to receive it.
Regarding your question, the item you circled in blue is a 6-pin connector board that allowed me to extend the short cable using another 6-pin cable. It is kind of bulky, so i just taped over it.
In your implementation, does that look like you have two antennas stacked on top of each other? Can you please elaborate?
Also, did you get a chance to try out the GPS signal viewer in the
voxl-portal? how high were your SNR during your test in open sky?Additionally, as i mentioned before, the proximity of RC transmitter (within < 2 meters) of the drone seems to decrease SNR, so please check that. It seems the RC transmitter is sending out signal outside of 900mhz band, which affects GPS.
Regarding the upgrade mast kit, i am also going to receive it and test it to confirm that it performs similarly to my initial mast.
I am going to perform some more testing in the next few days. I know there are a lot of factors that can affect the GPS signal, i will try to summarize them all in a shorter write-up.
Alex
@Alex-Kushleyev Thanks for the info. Yes your team has shipped a GPS mast kit to me and it should arrive tomorrow. Thanks very much for making that happen. I'll try it and let you know the results in the next few days.
In my implementation I did not have two antennas, only one. I did try the GPS viewer in voxl-portal and it worked great, much more convenient than Ublox Ucenter. The GPS signals I received were about 20-30dB in open sky with up to 9 satellites. Much better than before but not enough to get a lock. I did not power up the RC transmitter because I'm connecting exclusively with 5G Google Fi when the drone is outside (inside I use the USB cable). I've also removed the WiFI USB device just to limit the possibilities.
Looking forward to testing the mast kit.
Bob
-
@Alex-Kushleyev Thanks for the info. Yes your team has shipped a GPS mast kit to me and it should arrive tomorrow. Thanks very much for making that happen. I'll try it and let you know the results in the next few days.
In my implementation I did not have two antennas, only one. I did try the GPS viewer in voxl-portal and it worked great, much more convenient than Ublox Ucenter. The GPS signals I received were about 20-30dB in open sky with up to 9 satellites. Much better than before but not enough to get a lock. I did not power up the RC transmitter because I'm connecting exclusively with 5G Google Fi when the drone is outside (inside I use the USB cable). I've also removed the WiFI USB device just to limit the possibilities.
Looking forward to testing the mast kit.
Bob
@ROBERT-JUDD , 20-30dB is still very low, so something else is going on. Ideally, majority of satellites in open sky would be above or around 40dB. If it is at all possible, can you try disabling the 5G modem and instead just use USB connection with adb forwarding to look at
voxl-portal: https://docs.modalai.com/voxl-portal-via-adb/The reason why i asked about two antennas is because it looks like you have two antenna stacked on top of each other in your picture. Or is it just a plastic mount?
 . Maybe i am just not familiar with this GPS receiver you are using.
. Maybe i am just not familiar with this GPS receiver you are using.I should be getting my kit later today, so i will test it out. In my early tests i was using the original GPS module that came with Starling 2 Max and it was fine ( you can see it in the screen shots that you also shared in this thread).
Alex
-
@Alex-Kushleyev said in Poor GPS Fix:
I believe your name is already on the list to receive it.
Anyway we can get on that list too? We received our starling 2 max nearly a month ago now and have only recently been able to test it. We're happy with everything but the GPS problem makes this product borderline unacceptable. We just had a meeting where we decided to hold off on ordering 5 more starlings because of this issue!
-
@Alex-Kushleyev said in Poor GPS Fix:
I believe your name is already on the list to receive it.
Anyway we can get on that list too? We received our starling 2 max nearly a month ago now and have only recently been able to test it. We're happy with everything but the GPS problem makes this product borderline unacceptable. We just had a meeting where we decided to hold off on ordering 5 more starlings because of this issue!
@Rodrigo-Betances , yes, absolutely. I will provide your name to the team.
-
@Rodrigo-Betances , yes, absolutely. I will provide your name to the team.
@Alex-Kushleyev That's just the PETG plastic mount that I 3D printed in the picture. I'm using the GPS receiver that came with my Starling 2 Max from ModalAI (3DR taoglas).
Here's what I'm seeing in voxl-portal with my modification. ModalAI's GPS kit should arrive today, and I should be able to send you results for that in a few days.
-
@Alex-Kushleyev said in Poor GPS Fix:
I believe your name is already on the list to receive it.
Anyway we can get on that list too? We received our starling 2 max nearly a month ago now and have only recently been able to test it. We're happy with everything but the GPS problem makes this product borderline unacceptable. We just had a meeting where we decided to hold off on ordering 5 more starlings because of this issue!
@Rodrigo-Betances @Alex-Kushleyev @somalley OK I received the mast GPS fix from ModalAI and I've installed and tested it. I do get more satellites and the signal is enough to get a GPS lock, so I'm clear to fly at this point. The signal still seems a bit low but maybe that's just my location. I do have a clear view of the sky but there are tall trees not far away that may block satellites below roughly 45 degrees from the horizon.
IMPORTANT: The mast kit shipped with a ca. 10cm 6-pin cable with female JST GH connectors on each end. There is no way to connect that cable to the existing connector, and the cable itself is too short to reach the VOXL2 connector. I would suggest that one end be shipped with a male connector. Otherwise customers will need to make their own cable as I did.
Thanks for your help. Looking forward to reports from others.

-
@Rodrigo-Betances @Alex-Kushleyev @somalley OK I received the mast GPS fix from ModalAI and I've installed and tested it. I do get more satellites and the signal is enough to get a GPS lock, so I'm clear to fly at this point. The signal still seems a bit low but maybe that's just my location. I do have a clear view of the sky but there are tall trees not far away that may block satellites below roughly 45 degrees from the horizon.
IMPORTANT: The mast kit shipped with a ca. 10cm 6-pin cable with female JST GH connectors on each end. There is no way to connect that cable to the existing connector, and the cable itself is too short to reach the VOXL2 connector. I would suggest that one end be shipped with a male connector. Otherwise customers will need to make their own cable as I did.
Thanks for your help. Looking forward to reports from others.
Yes, we are aware about the cable mismatch (sorry, the shipment was rushed a bit, but we will get it right!)
Regarding the satellite SNR, yest it still looks low. I would normally expect 10dB higher.
Are you able to test with disabled 5G modem? maybe pop out the 5G card or shut it down via a pin ( think we discussed how to do this long time ago).
I just received the same kit and will be testing it today and compare with my initial implementation of the mast. Will report back..
Alex
-
@Rodrigo-Betances @Alex-Kushleyev @somalley OK I received the mast GPS fix from ModalAI and I've installed and tested it. I do get more satellites and the signal is enough to get a GPS lock, so I'm clear to fly at this point. The signal still seems a bit low but maybe that's just my location. I do have a clear view of the sky but there are tall trees not far away that may block satellites below roughly 45 degrees from the horizon.
IMPORTANT: The mast kit shipped with a ca. 10cm 6-pin cable with female JST GH connectors on each end. There is no way to connect that cable to the existing connector, and the cable itself is too short to reach the VOXL2 connector. I would suggest that one end be shipped with a male connector. Otherwise customers will need to make their own cable as I did.
Thanks for your help. Looking forward to reports from others.
@ROBERT-JUDD Nice! Hopefully we can get one of those kits too! Green with envy over here haha
-
Yes, we are aware about the cable mismatch (sorry, the shipment was rushed a bit, but we will get it right!)
Regarding the satellite SNR, yest it still looks low. I would normally expect 10dB higher.
Are you able to test with disabled 5G modem? maybe pop out the 5G card or shut it down via a pin ( think we discussed how to do this long time ago).
I just received the same kit and will be testing it today and compare with my initial implementation of the mast. Will report back..
Alex
@Alex-Kushleyev This morning I tried to determine if the 5G service affects the GPS signal. I removed the SIM card, turned off the power using the commands below, and verified that I had no 5G service. I also tried various combinations of these, and I also tried disabling voxl-modem and rebooting.
voxl-gpio -m 1 out
voxl-gpio -w 1 0 # power off
voxl-gpio -w 1 1 # power onNone of these had any effect on the GPS signal. It remains essentially the same as the graph I sent yesterday (20-35 db on ca. 10 satellites). This does get a GPS position lock, however, so probably I can fly.
Looking forward to your results.
-
@Rodrigo-Betances @Alex-Kushleyev @somalley OK I received the mast GPS fix from ModalAI and I've installed and tested it. I do get more satellites and the signal is enough to get a GPS lock, so I'm clear to fly at this point. The signal still seems a bit low but maybe that's just my location. I do have a clear view of the sky but there are tall trees not far away that may block satellites below roughly 45 degrees from the horizon.
IMPORTANT: The mast kit shipped with a ca. 10cm 6-pin cable with female JST GH connectors on each end. There is no way to connect that cable to the existing connector, and the cable itself is too short to reach the VOXL2 connector. I would suggest that one end be shipped with a male connector. Otherwise customers will need to make their own cable as I did.
Thanks for your help. Looking forward to reports from others.
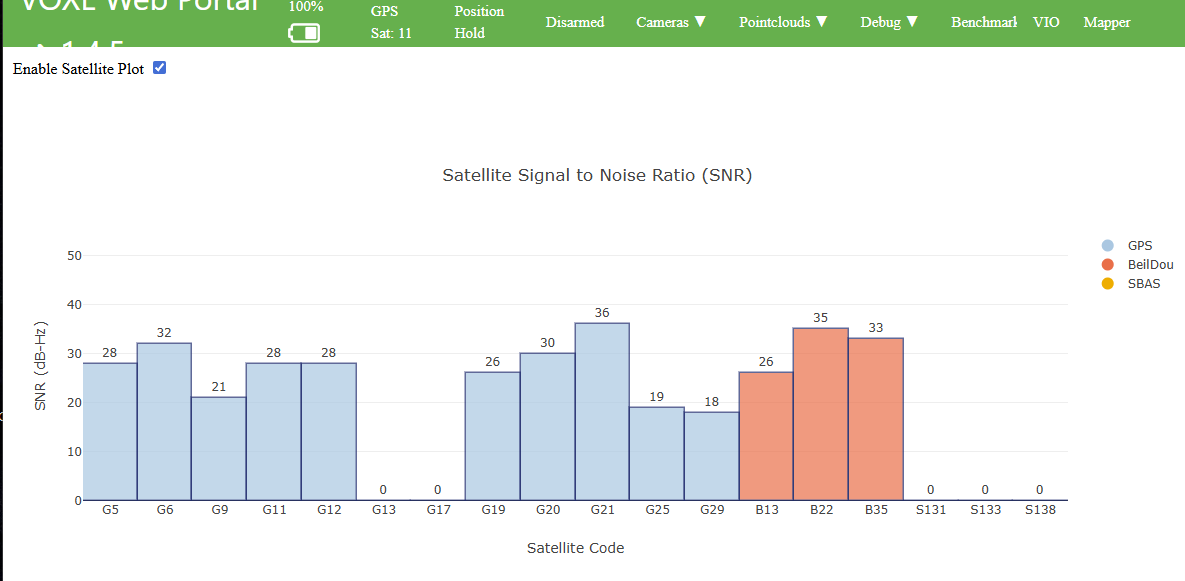
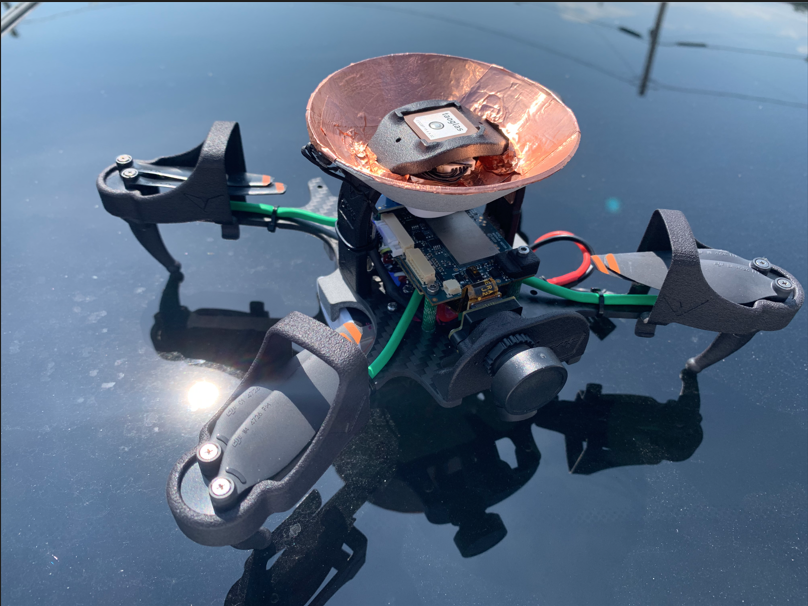
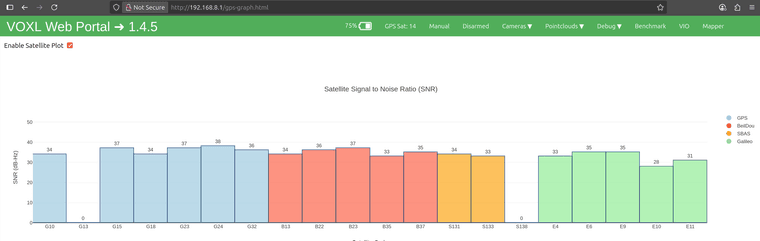
We built upon the shield/cone concept since it showed promise and worked to eliminate any tiny gaps and cracks where EMI could potentially leak through. We designed and 3D printed a cone that would come together on both sides of the GPS antenna mount with enough spacing for them to slide around the posts. The inside of the cone and some of the post had copper tape applied to it. Aim of this is to shield the GPS antenna from all RF below the cone and only receive RF from above. As you can see from the screen captures, the results are very promising. I think my team and I can now move forward in testing that was previously blocked by the poor GPS performance. Hope this helps and inspires some other fixes.
You may want to consider a small RF shield cone on top of your mast.
Here are the results from our custom shield and testing.

-
We built upon the shield/cone concept since it showed promise and worked to eliminate any tiny gaps and cracks where EMI could potentially leak through. We designed and 3D printed a cone that would come together on both sides of the GPS antenna mount with enough spacing for them to slide around the posts. The inside of the cone and some of the post had copper tape applied to it. Aim of this is to shield the GPS antenna from all RF below the cone and only receive RF from above. As you can see from the screen captures, the results are very promising. I think my team and I can now move forward in testing that was previously blocked by the poor GPS performance. Hope this helps and inspires some other fixes.
You may want to consider a small RF shield cone on top of your mast.
Here are the results from our custom shield and testing.
Very cool, thank you for sharing. We will try something like this.
Please note that we have observed that the wifi dongle, which is right under the gps receiver, causes some interference as well. Can you please try to repeat your test by unplugging the dongle completely?
A workaround to move the dongle to a different location is to use a different USB breakout board. Instead of M0141, use M0151 with a cable (JST GH to USB A Female).
Alex
-
Hey @Alex-Kushleyev how can I get on that mailing list for the ModalAI sanctioned mast? I designed and 3DP two mounts and used a carbon fibre rod, along with a copper laminate board and seen great improvement in GPS count (see image and screenshot).
Did a couple test flights with this set up and everything ran smoothly. I'll have a better peace of mind with an official mast though.Looking forward to your response!


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login