doodle labs and joystick setup
-
@Jetson-Nano You set that parameter to match the button you want to use.
-
@Eric-Katzfey Thank you for reverting back, The options only show one option button 1. I tested with button one but the drone was not taking in the command for enabling the turtle mode.
I want to know whether the code was tested out, so that I can be sure about not missing out on any parameter or setup -
@Jetson-Nano It's a parameter that you can set to any number you want. In QGC you can look at the joysticks tab and see as you press each button which number it is. Then set the parameter to that number.
-
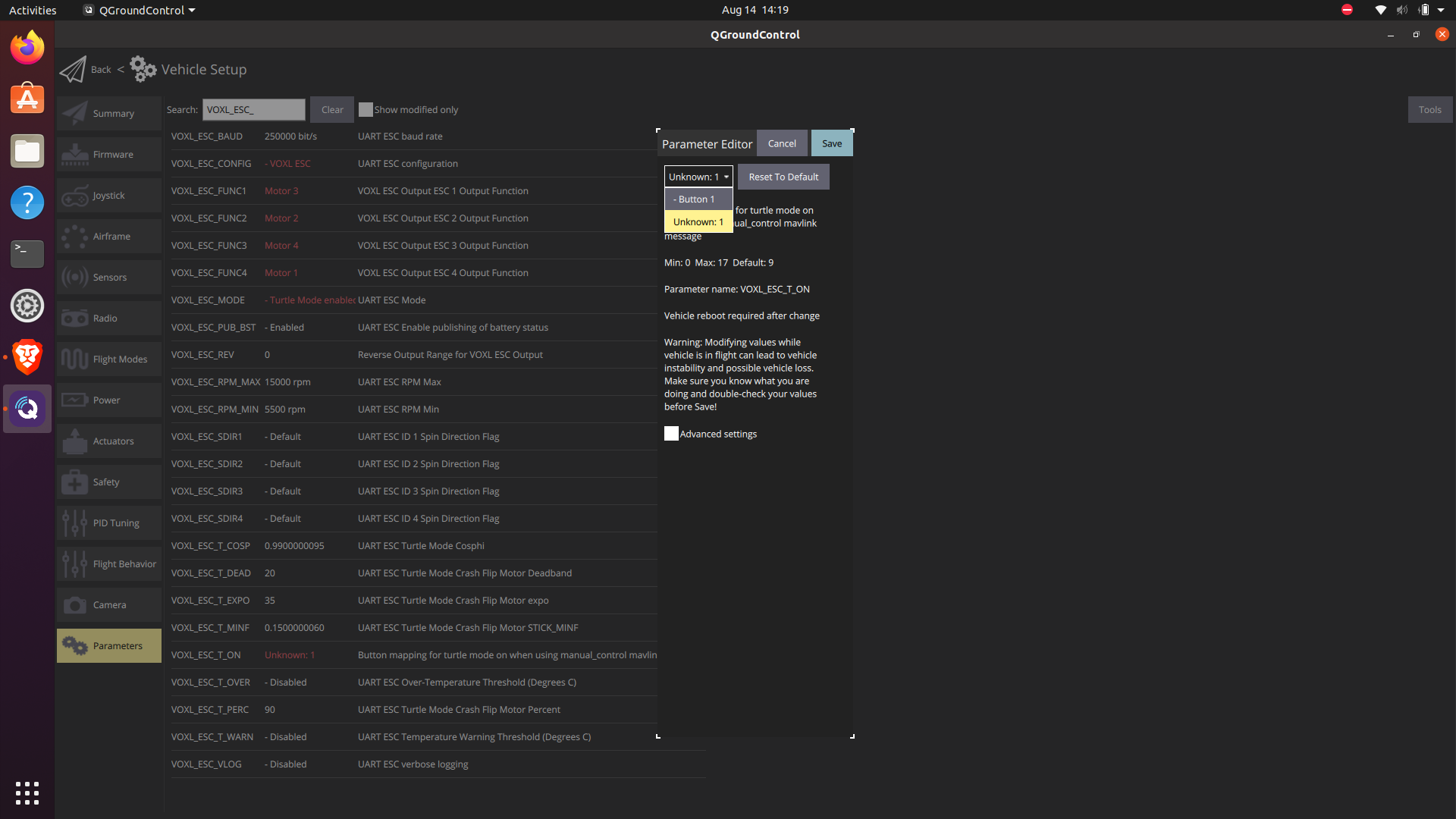
@Eric-Katzfey I am not able to setup multiple buttons, it is only showing one option of
button 1.
Also after assigning the button one and trying to enable and use turtle mode, it is not working.
Is there any particular version of px4 that this works with.
My setup is VOXL 2 ---> TELEM 1 --> Flight core v2 --> TELEM 2 --> FPV ESC
In normal setup the motors are working and rotating, but when I try to keep the drone upside down and enable the turtle mode , the QGC is still showingnot readymessage. Also I am not able to ARM because of this.
Is there anything I am missing out? -
@Eric-Katzfey could you please help me out here
-
@Jetson-Nano Let's try to walk through this and see where it is going wrong. Please provide answers to all of the following questions. Go to the joystick tab in QGC and press the button on the joystick that you want to use for turtle mode. Which number lights up when you press the button? Next, go to the MAVLink console and provide the output of these commands:
ver all,listener manual_control_setpoint,param show VOXL_ESC_MODE,param show VOXL_ESC_T_ON, andparam show COM_RC_IN_MODE. If VOXL_ESC_T_ON is not set to the number of the button you just discovered on the joystick tab then change it to the value you want. For example, by default VOXL_ESC_T_ON is set to 9. If you want to use button 10 instead then doparam set VOXL_ESC_T_ON 10. If you had to change that parameter then reboot and verify that it is now set correctly. You should see the aux1 value in manual_control_setpoint change from 0.0 to 1.0 when you press the button that you have chosen. Can you verify that you are seeing that? -
@Jetson-Nano If all that seems to be working then press the turtle button and arm (with drone right side up, not upside down) and verify that with turtle mode enabled the propellers are spinning in the opposite direction and the drone won't lift off. Of course, you must be extremely careful when running this test!!! Make sure that the drone is in a location where it cannot cause damage or injure someone if it goes out of control. It would be best to completely remove the propellers and just verify that the motors are spinning in the opposite direction of normal flight.
-
@Eric-Katzfey
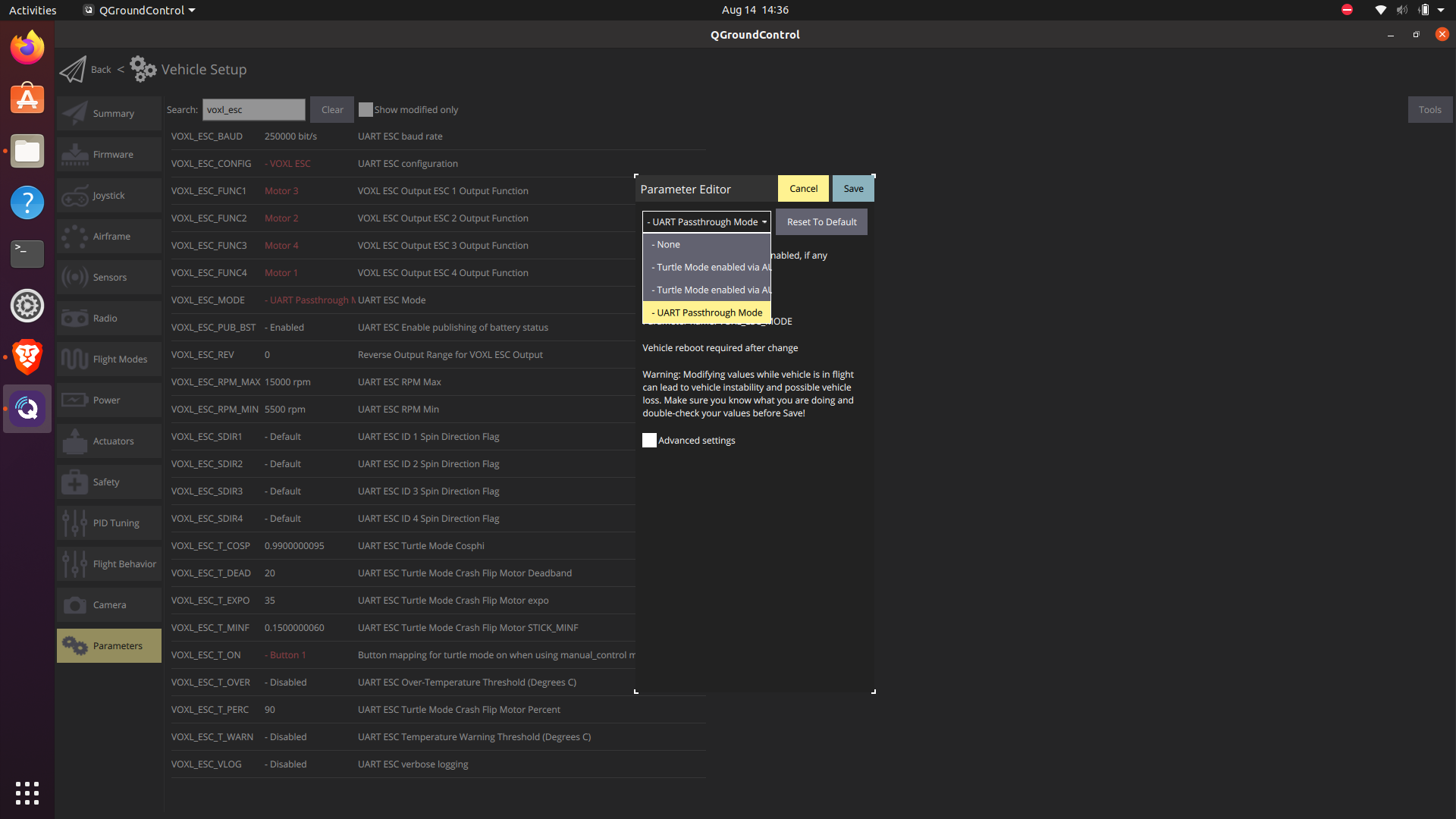
I followed the steps you suggested, i am attaching the Screenshots. I tried what you suggested the result is still the same, I am not able to arm the system. I tried with various options forVOXL_ESC_MODE, still the same.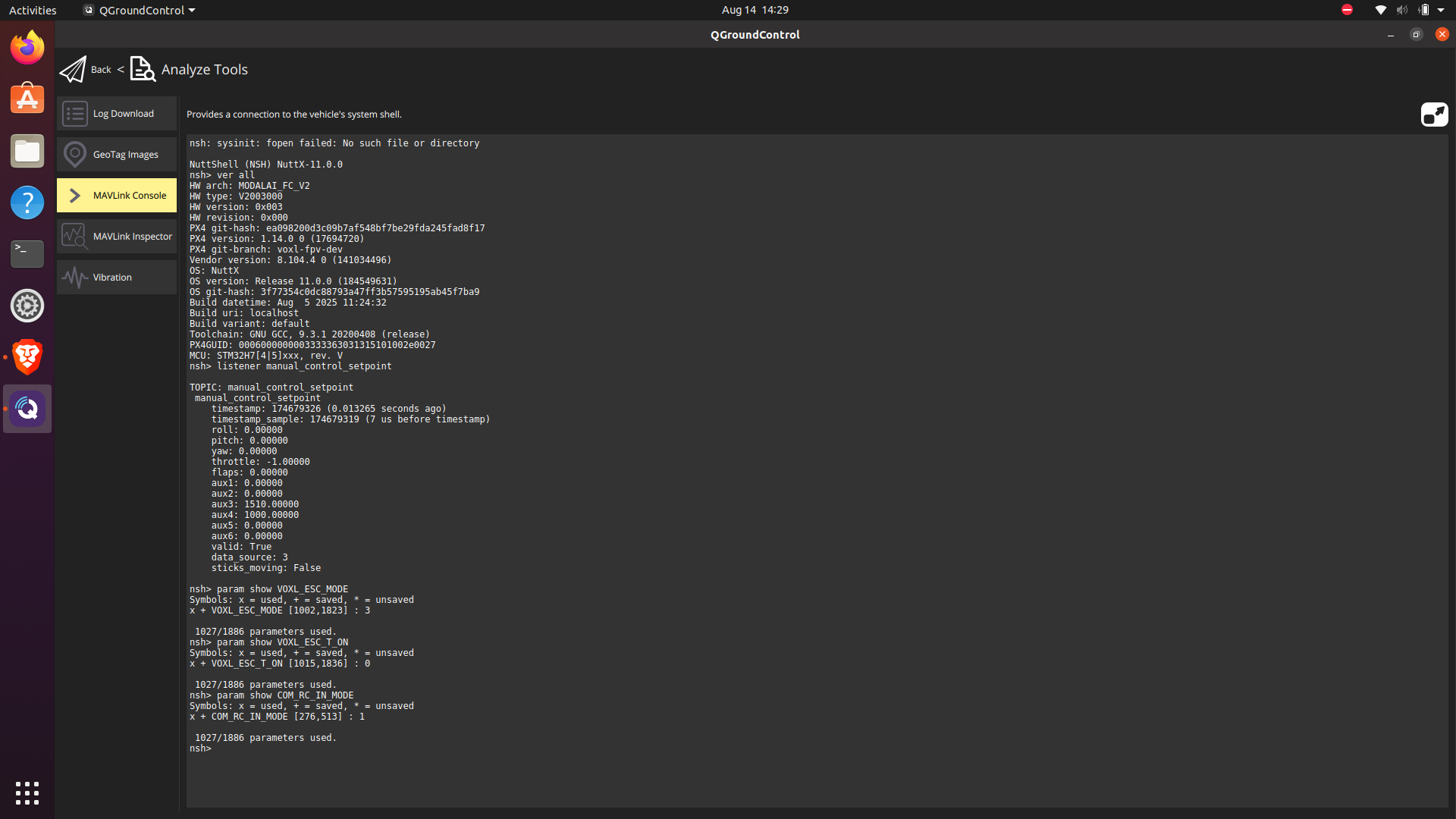
I clicked the assigned button here, AUX 1 values are changing but only when i keep the
voxl_ESC_MODE to UART passthorugh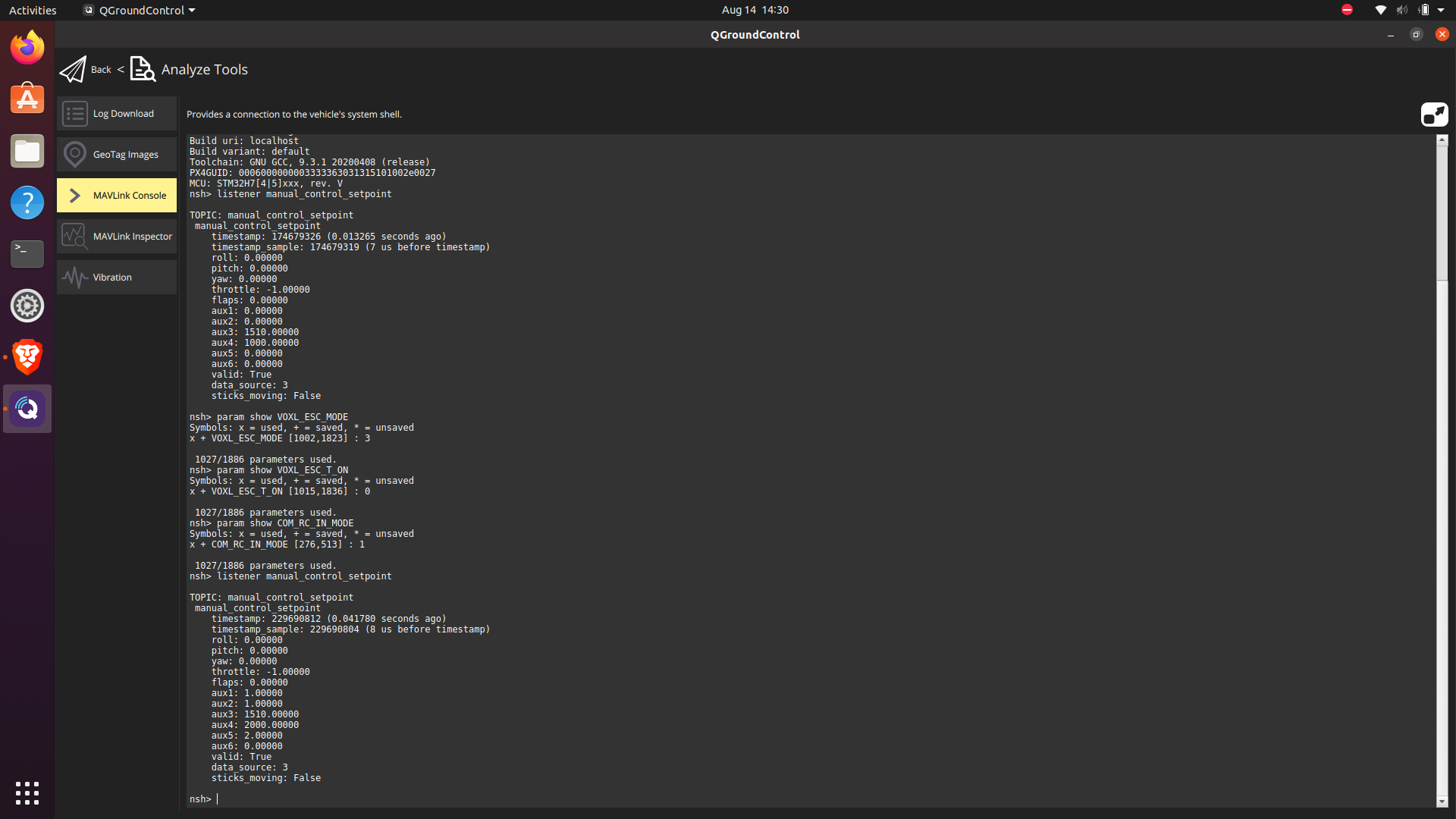
-
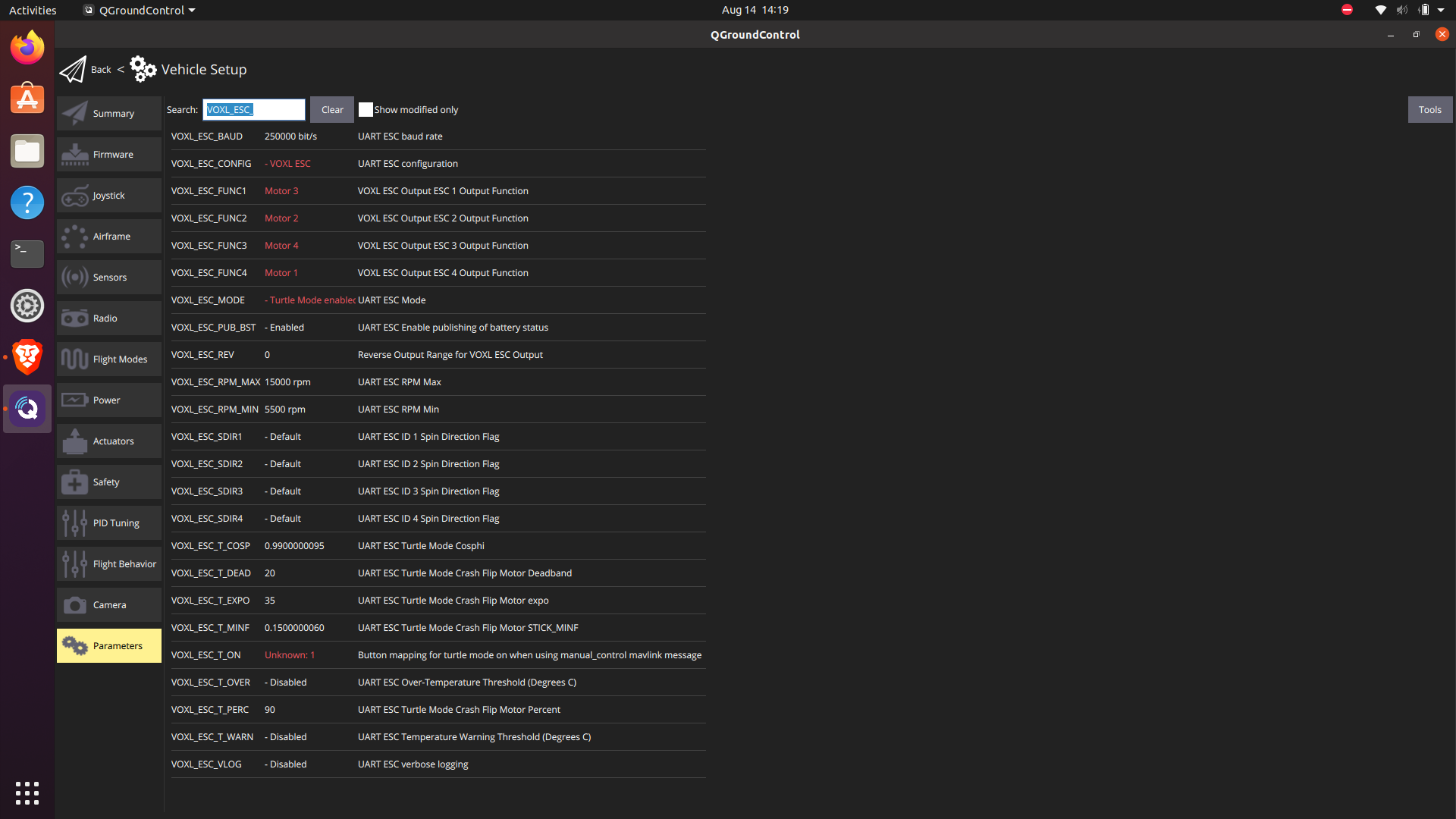
@Jetson-Nano Here are the steps I am using for testing. Here are my VOXL_ESC parameters:
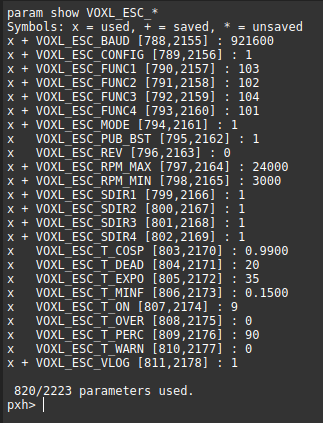
My VOXL_ESC_BAUD is set non-standard because I am using an ESC simulator. I have flight mode set to altitude mode. If I check the ESC commands I see no output:

Then I arm and check ESC commands and see values:

Then I disarm, press button 9, arm, move both sticks around and see these ESC commands:

Notice that most motors are 0 except for 1 or 2 and are of opposite sign than normal. In this case pitch was centered and roll was full right. Hope this helps. -
@Eric-Katzfey
Thank you for reverting back, I will check these out and get back to you. Also I will flash the FC once more and see if I have any luck.
I would like to know which is the version of PX4 you are using. -
@Jetson-Nano I was using v1.14.0-8.106.1
-
Hey @Eric-Katzfey ,
sorry for the late reply, I tested it out by keeping the drone straight and enabling turtle mode, it is working. I should also press both the turtle mode button and arm button together to get it working.
The major issue still is there, When i try to arm the system by keeping it facing down or in an angle, the drone is not accepting the command and is not arming.
I am attaching screenshot for your reference.
Please help me out here. I am using the px4 firmware version 1.14.0 dev 8.104.4
Since it is working when I keep it straight and arm, I feel there is something wrong in the logic somewhere or in the parameters.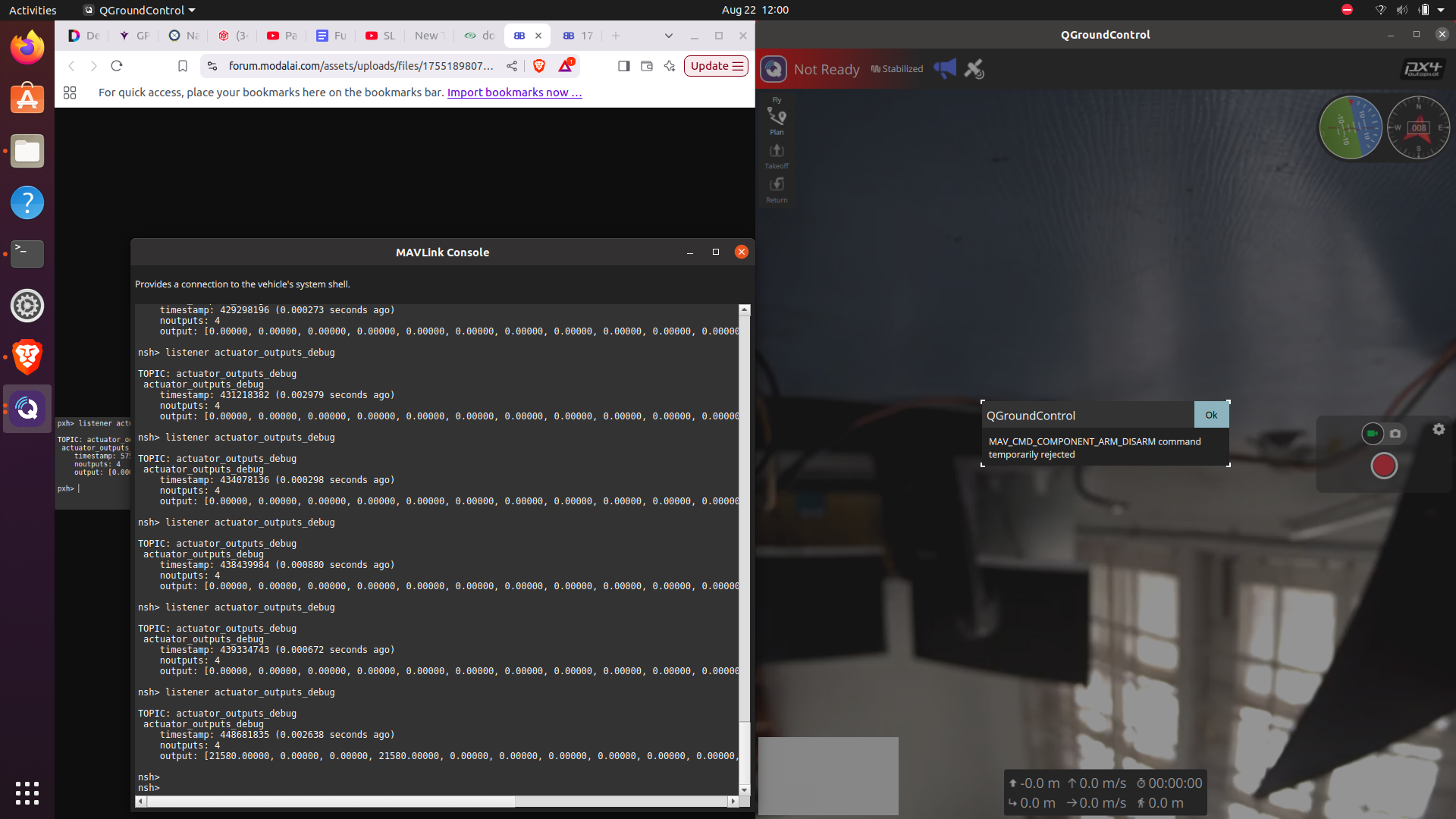
-
@Jetson-Nano I'm sure it is related to your parameter settings. Take a look at our parameter settings for FPV drones and compare against what you are using: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/dev/params/v1.14/platforms/D0008_v5.params?ref_type=heads
-
@Eric-Katzfey Thank you for reverting back, I am able to get the turtle mode working now, The error was due to the safety parameters, once i changed it to the FPV setup, it was working.
Once again thank you for the support. It was really helpful.