SYS_AUTOSTART param missing, shown in QGC, after flashing the flight deck with voxl2_SDK_1.4.1
-
To whom it may concern,
When flashing the flight deck with voxl2_SDK_1.4.1,
here are my stepsStep 1
PLEASE SELECT WHICH KERNEL TO FLASH- M0054-1 -> QRB5165M, Starling (D0005), Sentinel (D0006), FPV (D0008), D0010, PX4 Dev Kit (D0011)
Step 2
VOXL is not yet configured for a particular SKU.
Please select the new desired product family:
16) flight-deckStep 3
4) voxl2Step 4
If you would like to select a special camera config that differs
from the default for your product family, please select an option.
Simply hit ENTER to use the default
ENTERfamily code: MDK-F0001 (flight-deck)
compute board: 4 (voxl2)
hw version: 1
cam config: 3
modem config: 0 (none)
tx config: 0 (none)
extras config: 0 (none)
SKU: MDK-F0001-4-V1-C3-T0-M0-X0Step 5
Station mode is for connecting to a normal wifi network.- leave as-is
Step 6
To work with the Taoglas GPS "Classic" M9N w/IST8308 - M10034 which is connected to the J19 port,
and see the connection in the QGC,
I made the following changes:in /etc/modalai/voxl-px4.conf,
GPS=AUTODETECTin /etc/modalai/voxl-mavlink-server.conf,
"primary_static_gcs_ip": "192.168.110.205",
"primary_static_gcs_port": 14550,
"secondary_static_gcs_ip": "0.0.0.0",
"secondary_static_gcs_port": 14550,==========
Then
1.
I saw
fix type is always NO GPS even in the outdoor condition in which GPS is 3D fixed before updating to voxl2_SDK_1.4.1
==========
Any suggestions to investigate/fix the issues above?Thank you for your precious time on this matter.
-
To whom it may concern,
When flashing the flight deck with voxl2_SDK_1.4.1,
here are my stepsStep 1
PLEASE SELECT WHICH KERNEL TO FLASH- M0054-1 -> QRB5165M, Starling (D0005), Sentinel (D0006), FPV (D0008), D0010, PX4 Dev Kit (D0011)
Step 2
VOXL is not yet configured for a particular SKU.
Please select the new desired product family:
16) flight-deckStep 3
4) voxl2Step 4
If you would like to select a special camera config that differs
from the default for your product family, please select an option.
Simply hit ENTER to use the default
ENTERfamily code: MDK-F0001 (flight-deck)
compute board: 4 (voxl2)
hw version: 1
cam config: 3
modem config: 0 (none)
tx config: 0 (none)
extras config: 0 (none)
SKU: MDK-F0001-4-V1-C3-T0-M0-X0Step 5
Station mode is for connecting to a normal wifi network.- leave as-is
Step 6
To work with the Taoglas GPS "Classic" M9N w/IST8308 - M10034 which is connected to the J19 port,
and see the connection in the QGC,
I made the following changes:in /etc/modalai/voxl-px4.conf,
GPS=AUTODETECTin /etc/modalai/voxl-mavlink-server.conf,
"primary_static_gcs_ip": "192.168.110.205",
"primary_static_gcs_port": 14550,
"secondary_static_gcs_ip": "0.0.0.0",
"secondary_static_gcs_port": 14550,==========
Then
1.
I saw
fix type is always NO GPS even in the outdoor condition in which GPS is 3D fixed before updating to voxl2_SDK_1.4.1
==========
Any suggestions to investigate/fix the issues above?Thank you for your precious time on this matter.
@will-huang-oksi Don't worry about the missing parameter warning in QGC. VOXL 2 is slightly different in it's operation from standard microcontroller based boards and it doesn't use all of the same parameters which confuses QGC a bit.
-
To whom it may concern,
When flashing the flight deck with voxl2_SDK_1.4.1,
here are my stepsStep 1
PLEASE SELECT WHICH KERNEL TO FLASH- M0054-1 -> QRB5165M, Starling (D0005), Sentinel (D0006), FPV (D0008), D0010, PX4 Dev Kit (D0011)
Step 2
VOXL is not yet configured for a particular SKU.
Please select the new desired product family:
16) flight-deckStep 3
4) voxl2Step 4
If you would like to select a special camera config that differs
from the default for your product family, please select an option.
Simply hit ENTER to use the default
ENTERfamily code: MDK-F0001 (flight-deck)
compute board: 4 (voxl2)
hw version: 1
cam config: 3
modem config: 0 (none)
tx config: 0 (none)
extras config: 0 (none)
SKU: MDK-F0001-4-V1-C3-T0-M0-X0Step 5
Station mode is for connecting to a normal wifi network.- leave as-is
Step 6
To work with the Taoglas GPS "Classic" M9N w/IST8308 - M10034 which is connected to the J19 port,
and see the connection in the QGC,
I made the following changes:in /etc/modalai/voxl-px4.conf,
GPS=AUTODETECTin /etc/modalai/voxl-mavlink-server.conf,
"primary_static_gcs_ip": "192.168.110.205",
"primary_static_gcs_port": 14550,
"secondary_static_gcs_ip": "0.0.0.0",
"secondary_static_gcs_port": 14550,==========
Then
1.
I saw
fix type is always NO GPS even in the outdoor condition in which GPS is 3D fixed before updating to voxl2_SDK_1.4.1
==========
Any suggestions to investigate/fix the issues above?Thank you for your precious time on this matter.
@will-huang-oksi Can you share a px4 flight log? How do you have the parameter SYS_HAS_GPS set?
-
@will-huang-oksi Don't worry about the missing parameter warning in QGC. VOXL 2 is slightly different in it's operation from standard microcontroller based boards and it doesn't use all of the same parameters which confuses QGC a bit.
As shown below, many sections are in red.
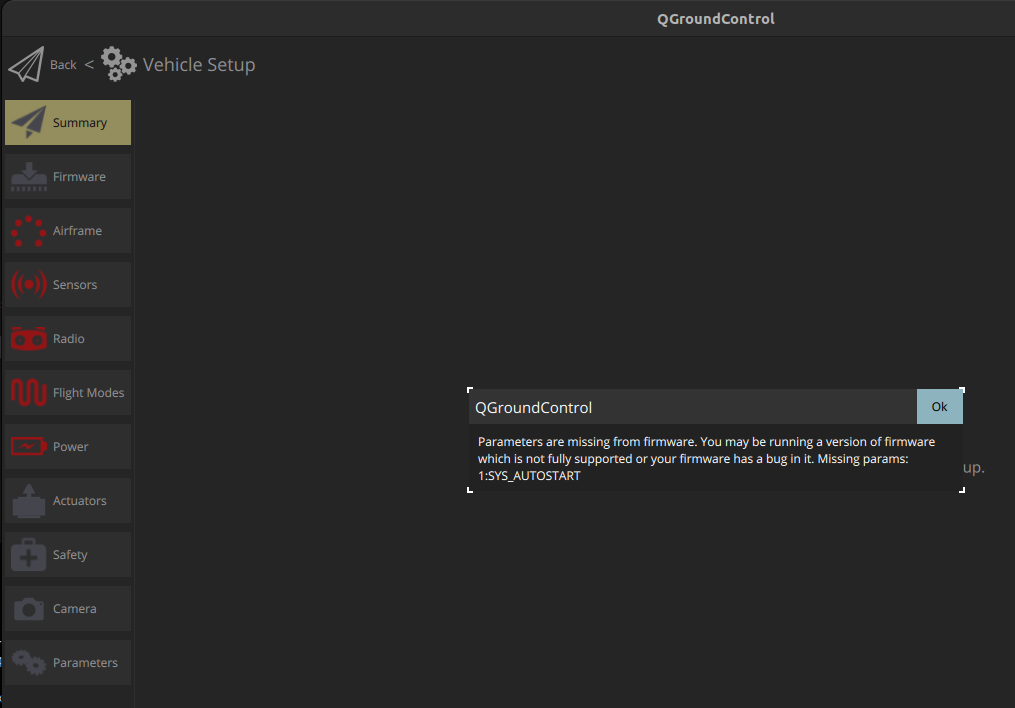
Are they not related to the missing parameter?
If not, how to resolve this issue after updating to voxl2_SDK_1.4.1? -
@will-huang-oksi Can you share a px4 flight log? How do you have the parameter SYS_HAS_GPS set?
Because having the missing parameter issue and a lot of sections are in red,
the VOXL flight deck is never armed and therefore there is no px4 log.Thank you for your precious time on this matter, and please let me know any other log/file will be helpful.
-
Because having the missing parameter issue and a lot of sections are in red,
the VOXL flight deck is never armed and therefore there is no px4 log.Thank you for your precious time on this matter, and please let me know any other log/file will be helpful.
@will-huang-oksi You need to set some parameters, calibrate sensors, etc. to properly setup PX4 for flight. If that hasn't been done then QGC will show those tabs in red indicating that you need to address something. If you set SYS_AUTOSTART to 4001 does that make the Airframe tab change from red?
-
Because having the missing parameter issue and a lot of sections are in red,
the VOXL flight deck is never armed and therefore there is no px4 log.Thank you for your precious time on this matter, and please let me know any other log/file will be helpful.
@will-huang-oksi We have setup routines to do all of this on our drones. But if you are making your own drone then you have to know how to set those values up yourself.
-
@will-huang-oksi We have setup routines to do all of this on our drones. But if you are making your own drone then you have to know how to set those values up yourself.
Thank you for the feedback.
Before your response, I added "-w" to re-flash the VOXL and resolved the SYS_AUTOSTART issue
./install.sh -w
Now I can calibrate the VOXL 2 flight deck.
If you need the flashing process log, let me know since I don't have privilege to upload any file yet.
NOW the remaining issue I have is no GPS fix.
The output from voxl-inspect-gps isdt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
124.9 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 3794659.840 |^CIn voxl-px4.conf
I tried GPS=AUTODETECT and GPS=MRO, but none of them works.
I connect Taoglas GPS "Classic" M9N w/IST8308 - M10034 to the J19 port.Here is the full configuration in the voxl-px4.conf
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=()Also there is no output from
cat /dev/ttyHS0
cat /dev/ttyHS1
cat /dev/ttyHS2
cat /dev/ttyHS3And this is what I have from journalctl -u voxl-px4 -n 100
-- Logs begin at Thu 2023-03-02 12:58:02 UTC, end at Thu 2023-03-02 13:35:18 UTC. --
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [uORB] Advertising remote topic takeoff_status
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_pos_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_att_control'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg1 = 'start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_rate_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_rate_controINFO [qshell] Send cmd: 'mc_rate_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036903088, local time: 2036905841
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036964219, local time: 2036966402
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037021853, local time: 2037025239
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'land_detector start multicopter'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037083571, local time: 2037085728
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'manual_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037144972, local time: 2037146917Any suggestions or any information you need?
Thank you for helping.
-
Thank you for the feedback.
Before your response, I added "-w" to re-flash the VOXL and resolved the SYS_AUTOSTART issue
./install.sh -w
Now I can calibrate the VOXL 2 flight deck.
If you need the flashing process log, let me know since I don't have privilege to upload any file yet.
NOW the remaining issue I have is no GPS fix.
The output from voxl-inspect-gps isdt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
124.9 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 3794659.840 |^CIn voxl-px4.conf
I tried GPS=AUTODETECT and GPS=MRO, but none of them works.
I connect Taoglas GPS "Classic" M9N w/IST8308 - M10034 to the J19 port.Here is the full configuration in the voxl-px4.conf
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=()Also there is no output from
cat /dev/ttyHS0
cat /dev/ttyHS1
cat /dev/ttyHS2
cat /dev/ttyHS3And this is what I have from journalctl -u voxl-px4 -n 100
-- Logs begin at Thu 2023-03-02 12:58:02 UTC, end at Thu 2023-03-02 13:35:18 UTC. --
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [uORB] Advertising remote topic takeoff_status
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_pos_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_att_control'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg1 = 'start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_rate_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_rate_controINFO [qshell] Send cmd: 'mc_rate_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036903088, local time: 2036905841
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036964219, local time: 2036966402
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037021853, local time: 2037025239
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'land_detector start multicopter'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037083571, local time: 2037085728
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'manual_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037144972, local time: 2037146917Any suggestions or any information you need?
Thank you for helping.
@will-huang-oksi said in SYS_AUTOSTART param missing, shown in QGC, after flashing the flight deck with voxl2_SDK_1.4.1:
Thank you for the feedback.
Before your response, I added "-w" to re-flash the VOXL and resolved the SYS_AUTOSTART issue
./install.sh -w
Now I can calibrate the VOXL 2 flight deck.
If you need the flashing process log, let me know since I don't have privilege to upload any file yet.
NOW the remaining issue I have is no GPS fix.
The output from voxl-inspect-gps isdt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
124.9 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 3794659.840 |^CIn voxl-px4.conf
I tried GPS=AUTODETECT and GPS=MRO, but none of them works.
I connect Taoglas GPS "Classic" M9N w/IST8308 - M10034 to the J19 port.Here is the full configuration in the voxl-px4.conf
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=()Also there is no output from
cat /dev/ttyHS0
cat /dev/ttyHS1
cat /dev/ttyHS2
cat /dev/ttyHS3And this is what I have from journalctl -u voxl-px4 -n 100
-- Logs begin at Thu 2023-03-02 12:58:02 UTC, end at Thu 2023-03-02 13:35:18 UTC. --
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [uORB] Advertising remote topic takeoff_status
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_pos_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_att_control'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg1 = 'start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_rate_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_rate_controINFO [qshell] Send cmd: 'mc_rate_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036903088, local time: 2036905841
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036964219, local time: 2036966402
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037021853, local time: 2037025239
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'land_detector start multicopter'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037083571, local time: 2037085728
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'manual_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037144972, local time: 2037146917Any suggestions or any information you need?
Thank you for helping.
I found a mistake
Previously I select flight-deck when re-flash.
This time with -w I select voxl2 flight-deck
Sorry for confusion.So the only issue I have now is the GPS issue.
Please let me know if any questions or suggestions. -
@will-huang-oksi said in SYS_AUTOSTART param missing, shown in QGC, after flashing the flight deck with voxl2_SDK_1.4.1:
Thank you for the feedback.
Before your response, I added "-w" to re-flash the VOXL and resolved the SYS_AUTOSTART issue
./install.sh -w
Now I can calibrate the VOXL 2 flight deck.
If you need the flashing process log, let me know since I don't have privilege to upload any file yet.
NOW the remaining issue I have is no GPS fix.
The output from voxl-inspect-gps isdt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
124.9 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 3794659.840 |^CIn voxl-px4.conf
I tried GPS=AUTODETECT and GPS=MRO, but none of them works.
I connect Taoglas GPS "Classic" M9N w/IST8308 - M10034 to the J19 port.Here is the full configuration in the voxl-px4.conf
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=()Also there is no output from
cat /dev/ttyHS0
cat /dev/ttyHS1
cat /dev/ttyHS2
cat /dev/ttyHS3And this is what I have from journalctl -u voxl-px4 -n 100
-- Logs begin at Thu 2023-03-02 12:58:02 UTC, end at Thu 2023-03-02 13:35:18 UTC. --
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [uORB] Advertising remote topic takeoff_status
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_pos_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_att_control'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg1 = 'start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Ok executing command: mc_att_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: qshell gotten: mc_rate_control start
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [muorb] SLPI: arg0 = 'mc_rate_controINFO [qshell] Send cmd: 'mc_rate_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036903088, local time: 2036905841
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2036964219, local time: 2036966402
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037021853, local time: 2037025239
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'land_detector start multicopter'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037083571, local time: 2037085728
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] Send cmd: 'manual_control start'
Mar 02 13:31:54 m0054 voxl-px4[4783]: INFO [qshell] qshell return value timestamp: 2037144972, local time: 2037146917Any suggestions or any information you need?
Thank you for helping.
I found a mistake
Previously I select flight-deck when re-flash.
This time with -w I select voxl2 flight-deck
Sorry for confusion.So the only issue I have now is the GPS issue.
Please let me know if any questions or suggestions.@will-huang-oksi On VOXL 2, if you enter the command
px4-listener sensor_gpswhat do you get? (Try it a few times) -
@will-huang-oksi On VOXL 2, if you enter the command
px4-listener sensor_gpswhat do you get? (Try it a few times)From other discussion,
I addqshell gps start -d 7 -b 115200and get the GPS now.
Here is my setting and please let me know if any questions.
Thank you for your precious time on this matter.AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER_MANAGER=VOXLPM
AIRSPEED_SENSOR=NONE
DISTANCE_SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA_STEPS=(
qshell gps start -d 7 -b 115200
)
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login