Odd behavior from ModalAI 4 in 1 ESC
-
Hi,
I've been testing / flying with a VOXL2 running px4 and ModalAI ESC (m0134-6 using the low rpm firmware). I've gone through the calibration process for each motor/prop combination, but in each case I am getting the same behavior. I am able to take off and fly normally for about a minute but after a about a minute, flight control becomes erratic and the quadcopter crashes (or I land beforehand). 3 out of the 4 motors are cool, but the 4th motor is hot. This has happened with 3 different sets of motors on the same ESC channel.
I originally thought I needed to adjust the tuning, but I'm wondering if there is actually something wrong with one of the ESCs on the ESC board. I have a M0138 to test as well, but I was only going to swap out to that board as a last resort.
Thanks!
Matt@Matthew-Wellner , are you able to share the PX4 log from a hover test? it has a lot of the ESC feedback information that we can use to examine what is going on. Also, if you are able to share the ESC config file, that would help.
Alex
-
@Matthew-Wellner , are you able to share the PX4 log from a hover test? it has a lot of the ESC feedback information that we can use to examine what is going on. Also, if you are able to share the ESC config file, that would help.
Alex
@Alex-Kushleyev - I can download it tomorrow and send it over. I've been noticing odd flight behavior too, that I thought was due to the ESC, but it may just be tuning? I crashed earlier today - when everything seemed stable flying, all of a sudden the platform dipped down on an angle and then it broke a prop.
Thanks,
Matt -
@Alex-Kushleyev - I can download it tomorrow and send it over. I've been noticing odd flight behavior too, that I thought was due to the ESC, but it may just be tuning? I crashed earlier today - when everything seemed stable flying, all of a sudden the platform dipped down on an angle and then it broke a prop.
Thanks,
Matt@Matthew-Wellner , once we have the PX4 log, we can dig into details, the ESC feedback useful information like actual RPM and power applied to the motor, so we will see if one ESC channel is having trouble tracking RPM or applying more power than other ESC channels. Based on the results i can advise you on further (stationary) tests where you can compare basic spin performance of each ESC channel - they should be identical if everything is working properly.
Also, if you don't mind sharing the motor and propeller that you are using, i could potentially buy a set (if it is readily available, or I may have it) and tune + test it to make sure the ESC parameters are solid. We can wait to see if that is necessary until after looking at the PX4 log.
Alex
-
@Matthew-Wellner , once we have the PX4 log, we can dig into details, the ESC feedback useful information like actual RPM and power applied to the motor, so we will see if one ESC channel is having trouble tracking RPM or applying more power than other ESC channels. Based on the results i can advise you on further (stationary) tests where you can compare basic spin performance of each ESC channel - they should be identical if everything is working properly.
Also, if you don't mind sharing the motor and propeller that you are using, i could potentially buy a set (if it is readily available, or I may have it) and tune + test it to make sure the ESC parameters are solid. We can wait to see if that is necessary until after looking at the PX4 log.
Alex
@Alex-Kushleyev the motor / prop combination is a mn4004 or mn4006 with a tmotor MS1101.
I switched over to the 138 ESC last night to see if the ESC board was just bad, but I'm still having similar issues.
Thanks again for the help!
Matt -
@Alex-Kushleyev the motor / prop combination is a mn4004 or mn4006 with a tmotor MS1101.
I switched over to the 138 ESC last night to see if the ESC board was just bad, but I'm still having similar issues.
Thanks again for the help!
Matt@Matthew-Wellner , remember we had a discussion about 5 months ago, where i helped with the tuning. At that time, did you get the setup to work? https://forum.modalai.com/topic/2979/can-you-power-voxl2-from-the-modalai-6s-esc/ . Did anything change since then in terms of your motor / propeller setup? did this issue suddenly start occurring without a hardware change? (any crashes that could have damaged the ESC?)
Also, is your motor a Tmotor MN4006 or SunnySky? Also, what KV and what voltage are you applying (4s / 6s). I do have these propellers.
Alex
-
@Matthew-Wellner , remember we had a discussion about 5 months ago, where i helped with the tuning. At that time, did you get the setup to work? https://forum.modalai.com/topic/2979/can-you-power-voxl2-from-the-modalai-6s-esc/ . Did anything change since then in terms of your motor / propeller setup? did this issue suddenly start occurring without a hardware change? (any crashes that could have damaged the ESC?)
Also, is your motor a Tmotor MN4006 or SunnySky? Also, what KV and what voltage are you applying (4s / 6s). I do have these propellers.
Alex
@Alex-Kushleyev sorry for the slow response. I never actually test flew the setup outside of a few quick lift offs because we were making some housing changes. I thought the platform just needed to be tuned.
I have run 3 different motors with similar behaviors - sunnysky 4004 (400kv), tmotor 4004 (400kv) and tmotor 4006 (380kv) all at 6s voltage with 11" props. I also tried 10" master airscrew props with the 4006s.
I swapped the 0134-6 ESC with a 0138 ESC yesterday after the the 0134-6 got hot enough that, I think, one of the motor wires desoldered itself.
Thanks again for the help!
Matt -
@Alex-Kushleyev sorry for the slow response. I never actually test flew the setup outside of a few quick lift offs because we were making some housing changes. I thought the platform just needed to be tuned.
I have run 3 different motors with similar behaviors - sunnysky 4004 (400kv), tmotor 4004 (400kv) and tmotor 4006 (380kv) all at 6s voltage with 11" props. I also tried 10" master airscrew props with the 4006s.
I swapped the 0134-6 ESC with a 0138 ESC yesterday after the the 0134-6 got hot enough that, I think, one of the motor wires desoldered itself.
Thanks again for the help!
Matt@Matthew-Wellner , thanks for the clarification. I do have the tmotor 4006 and sunysky motors, since i ordered it last time we had the discussion.
Lets take a look at the px4 log once you have a chance to share it. Thanks.
Alex
-
@Matthew-Wellner , thanks for the clarification. I do have the tmotor 4006 and sunysky motors, since i ordered it last time we had the discussion.
Lets take a look at the px4 log once you have a chance to share it. Thanks.
Alex
@Alex-Kushleyev I'm sorry to have to ask this, but is there a way to upload the logs via this interface? When I try and upload a file I get a permissions error.
-
@Alex-Kushleyev I'm sorry to have to ask this, but is there a way to upload the logs via this interface? When I try and upload a file I get a permissions error.
@Matthew-Wellner , no problem, if you are ok sharing the log publicly, here is how we usually do it : upload it here https://review.px4.io/ and send a link. from there i can inspect and download the log for further analysis.
-
@Matthew-Wellner , no problem, if you are ok sharing the log publicly, here is how we usually do it : upload it here https://review.px4.io/ and send a link. from there i can inspect and download the log for further analysis.
@Alex-Kushleyev Is there a way to share it privately? Otherwise I can send it to the link you already shared.
-
@Alex-Kushleyev Is there a way to share it privately? Otherwise I can send it to the link you already shared.
@Matthew-Wellner , i will reach out to you via email
-
@Matthew-Wellner , i will reach out to you via email
@Alex-Kushleyev thanks! I responded. The ESC parameters file were exactly as you example except for the calibration parameters (the 3 numbers we need from the calibration routine). I averaged the numbers I collected from running the calibration on each ESC.
-
@Alex-Kushleyev thanks! I responded. The ESC parameters file were exactly as you example except for the calibration parameters (the 3 numbers we need from the calibration routine). I averaged the numbers I collected from running the calibration on each ESC.
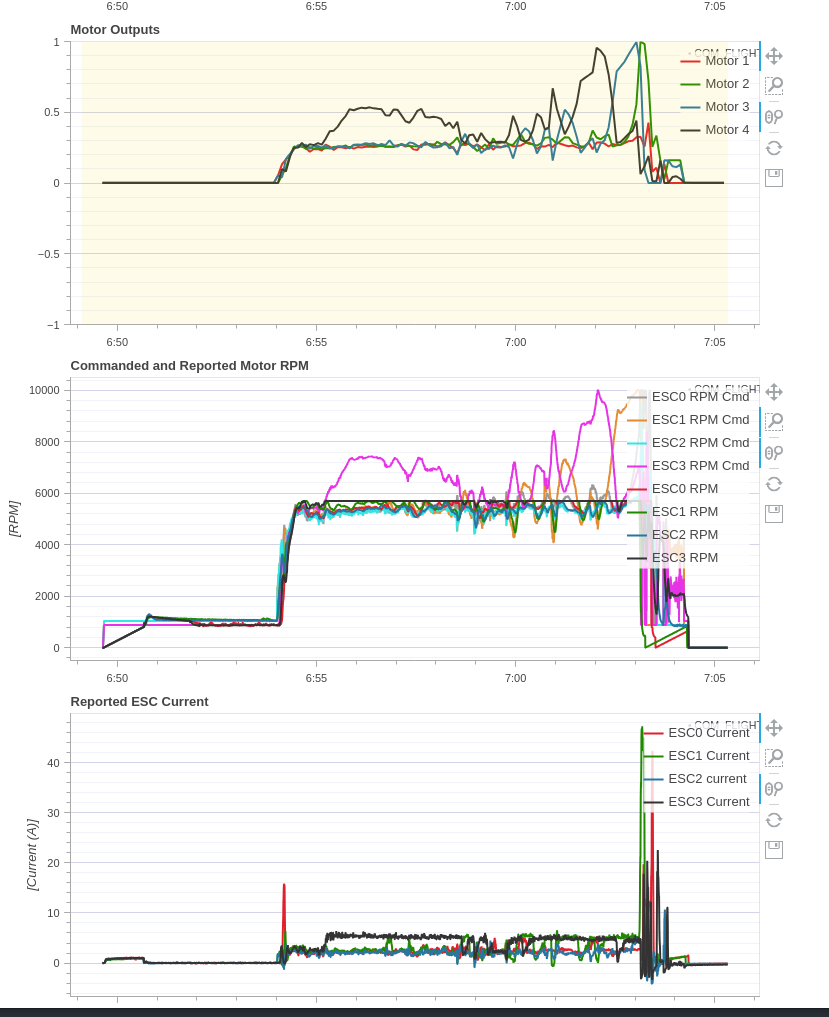
@Matthew-Wellner , As we discussed offline, I am going to post the summary for the likely issue here:
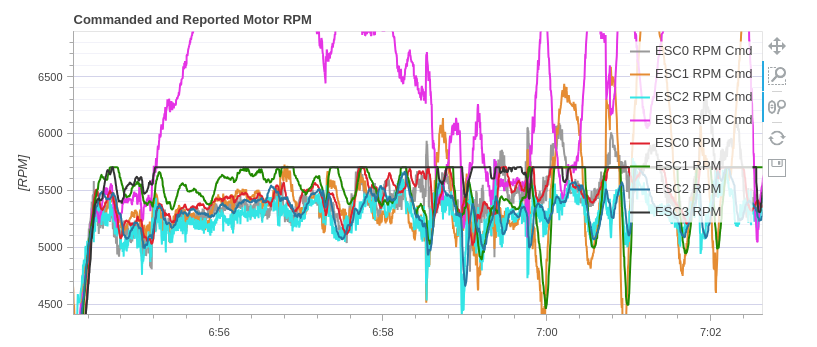
By setting "demag_timing: 1" in esc params, it enabled some experimental feature, which fails to work correctly above certain rpm. It prevents motor from spinning faster when more power is applied (above a certain rpm). You can see from plots above, the desired command for motor 4 (purple) goes higher, but actual rpm is flat lined around 5700rpm (black). Also the current jumps up significantly for motor 4 (black) when it hits that ceiling.
For your motor, please disable this "feature" by setting demag_timing to 0. Depending on your current timing advance, we may keep that the same or increase slightly.
After disabling demag_timing-> 0, i would recommend performing rpm step tests to make sure the de-syncs still do not happen.
I am sorry about this, I will update documentation to not recommend using this feature.
zoomed in
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login