Motor issues when running ESC calibration
-
copy all, will do.
-
@rdjarvis , sorry for confusion, please do not change esc params but find px4 tuning params for our fpv vehicle and try to load it to your vehicle (change 6s vbatt to 4s in px4 params since fpv vehicle uses 6s).
Test without props because attitude control is going tonbe much different for fpv vehicles vs yours. But you should still be able yo see thrust response in plots.
-
you can find our FPV params here :
-
We kept the custom ESC config for the 2203.5, and uploaded px4 FPV_RevB_v4.
Motors are more responsive in all channels, Throttle channel still conducts a "ramp up", but more aggresively when RC Tx input is applied.
-
@Alex-Kushleyev No actionable response from throttle.
-
Throttle input is being "ignored" regardless of RC Channel input, same response (slow ramp up) when armed in any flight mode (Manual/Stab/Pos etc..) and throttle is increased, even when RC Channel is changed (1,2,3,4).
Motors respond correctly with pitch, yaw, and roll inputs.
PX4 FPV_RevBv4 params are uploaded, switched to 4S and put min/max RPM to 3000/40000.
-
From the GCS, executed "take-off" command in "Position Mode" with props off. Motors smoothly increase. I "hand-flew" it up to 1m and UAV was adjusting for small movements correctly.
Executed "Land" and "hand-flew" it to the deck, landing detected and disarmed.
-
@rdjarvis , interesting. Can you please share a px4 log from that position mode test?
-
-
@rdjarvis , yes in this mode, the vehicle seems to be responding to thrust commands and motors are tracking rpm well (even though without props)
-
@Alex-Kushleyev I agree, what do you think the next troubleshooting step is for this issue?
-
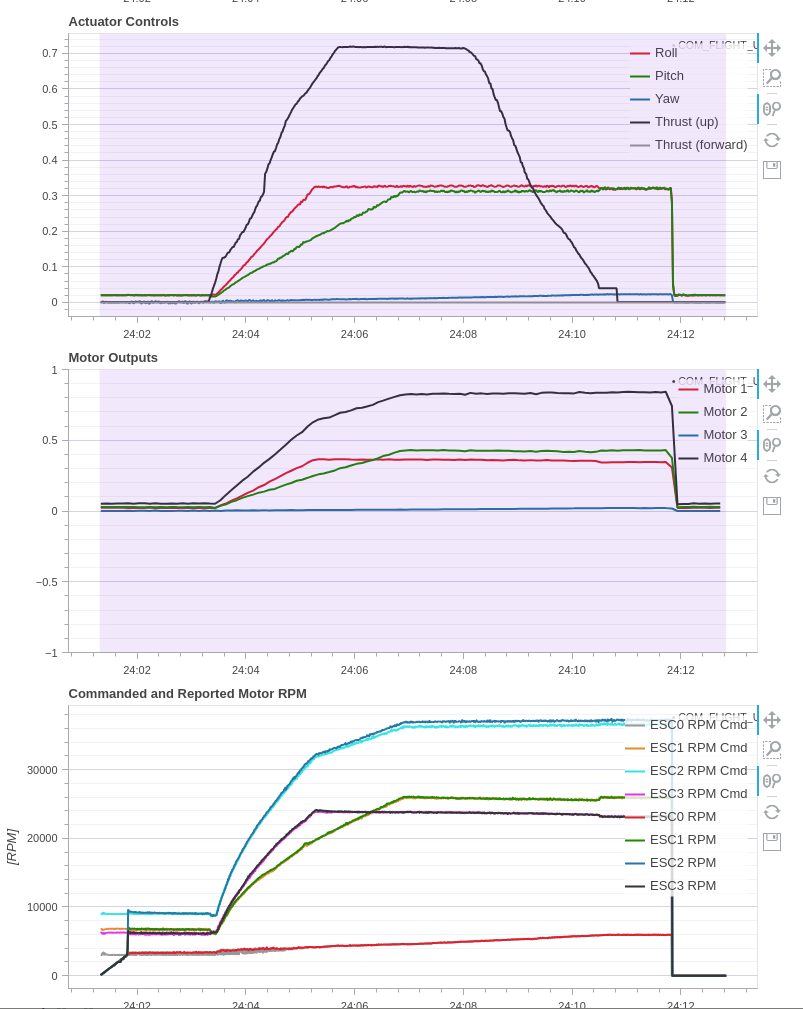
Also another observation.. remember in manual flight, it seemed like instead of responding to the throttle stick, the actuator outputs were going up slowly in a ramp -- i just double check that seems to be a response to small rill/pitch deviations that happened, so it seems that the thrust stick is COMPLETELY ignored, which is what you have suggested.
Now, the position mode goes through the same control pipeline except the hight is controlled using a high controller, as opposed to your radio. However, the commands are still going through the mixer that converts and thrust, roll, pitch, yaw commands to motor outputs , so that seems to be working correctly.
Based on that, it seems the issue is somewhere between the Actuator controls and motor outputs, which is the mixer, right? Actuator controls data shows the desired thrust (up) goes up, but motor output does not reflect this. Maybe we can look at the px4 source code for the mixer which maps the actuator controls to motor outputs.
I just noticed that you have parameters
CA_ROTORx_AZ(for x =0,1,2,3) set to 1, but default is -1, which would mean that you are saying that thrust from this motor goes up, not down? -
@Alex-Kushleyev Thanks Alex, We will test it out. In the meantime my team will be sending the first FPV 4n1 ESC back, so you can investigate onsite.
Thank you,
RDJ -
@rdjarvis , please let me know the RMA number once you send back the M0138 ESC. Thanks!
-
@rdjarvis , I received the M0138 ESC that you sent back (reported that you were unable to communicate with the ESC).
The issue was that the baud rate in ESC params was set to 2.5Mbit instead of 250K by accident, so our auto-scan in ESC tools could not detect the ESC (and VOXL2 DSP does not support 2.5Mbit).
We will fix this in future ESC firmware to prevent accidental setting of unsupported baud rates. Sorry about that.
Alex