VOXL Mini 4-in-1 ESC no Status LED nor sound after power connection
-
The things i've tested so far:
- Trying to detect the board over the voxl2 chip (sdk 1.1) -> no board was detected
- Trying to detect the board over the serial connection from a pc -> no board detected
- Measured voltage in -> 12 v during boot descending to 6 V after some time
- Measured voltage at motor out pins -> Approximately 6 V on each
- Inspected the chip -> no visual damage (at least according to my untrained eye)
It's been some weeks since first boot without the led and sound. At first i didn't think much of it because it is annoying having a flashing led next to you when you are trying to code / setup the drone.
There was no flight / crash before that boot. The only thing that could have happened is my hand touching the chip by accident because i was rearranging other wires. But i don't think a simple touch would be enough to hurt the chip.Any help is highly appreciated!
Hi @K-Stute
Few quick questions (with some sub-questions) to help us:-
What was your 12V power source? Have you tried other supplies to ensure you are not experiencing a power supply/battery failure? If you are trying a power supply, what is your current limit set to?
-
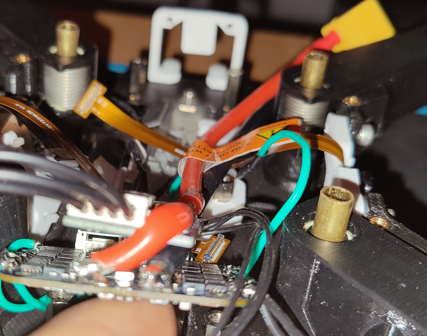
Can you please send some pics of your setup, with a zoom in near the power wires and all soldering joints?
-
What cable are you using for the VOXL 2 connection? Have you already verified your setup with another batch of items (other ESCs, VOXL 2's, PCs. etc)
Thanks!
-
Hi @K-Stute
Few quick questions (with some sub-questions) to help us:-
What was your 12V power source? Have you tried other supplies to ensure you are not experiencing a power supply/battery failure? If you are trying a power supply, what is your current limit set to?
-
Can you please send some pics of your setup, with a zoom in near the power wires and all soldering joints?
-
What cable are you using for the VOXL 2 connection? Have you already verified your setup with another batch of items (other ESCs, VOXL 2's, PCs. etc)
Thanks!
@Vinny Hey Vinny,
thanks for your quick reply.
- Im using the voxl power kit with the power plug
- Is it good enough? It is quite late in germany and i already cleaned up my desk for the day^^
- The cable is from the power block to the esc setup mentioned above if im not mistaken. I wanted to switch out the esc tomorrow but as you can see in the pictures that requires a bit of soldering so i wanted to consulte the forum first.
Let me know if there are any more infos i can give you!
-
-
@Vinny Hey Vinny,
thanks for your quick reply.
- Im using the voxl power kit with the power plug
- Is it good enough? It is quite late in germany and i already cleaned up my desk for the day^^
- The cable is from the power block to the esc setup mentioned above if im not mistaken. I wanted to switch out the esc tomorrow but as you can see in the pictures that requires a bit of soldering so i wanted to consulte the forum first.
Let me know if there are any more infos i can give you!
Hi @K-Stute
Thanks for all of the pics.
The two key ones are blurry, but I can tell from the other ones that your soldering seems to be quite good.That being said, what I think you have here is a blown 12V power wall wart.
That is not advised to be used for arming the drone (or when motors are attached). We even have the label right there on the power module to advise/warn against using power supplies and to use batteries for anything when motors are connected.

We had a few other similar forum posts about this type of failure, but it was more catastrophic:
https://forum.modalai.com/topic/3088/power-supply-faulty?_=1712638596553
https://forum.modalai.com/topic/2777/voxl-4-in-1-esc-smoking-on-bench-test-after-performing-calibration?_=1712638596557So, what I think is that your 12V supply is now no good. Hopefully the ESC itself is not damaged.
Are you able to change the source of your 12V to a proper battery instead?
However, before you do that, can you measure the resistance of the ESC + and - pads with a DMM (no power applied) and compare to a new or known good working unit?
If your ESC is damaged, it might shows itself as a low resistance reading across +/- pads. Normal ESCs should have a high resistance reading (it varies over time as the DMM is trying to charge the nodes, but it should be >100kohm more or less). Make sure red/positive lead on your DMM is on + and black/negative lead of the DMM is on - pad of ESC.We provide those power kits for users that do software benchtop development without motors.
-
Hi @K-Stute
Thanks for all of the pics.
The two key ones are blurry, but I can tell from the other ones that your soldering seems to be quite good.That being said, what I think you have here is a blown 12V power wall wart.
That is not advised to be used for arming the drone (or when motors are attached). We even have the label right there on the power module to advise/warn against using power supplies and to use batteries for anything when motors are connected.
We had a few other similar forum posts about this type of failure, but it was more catastrophic:
https://forum.modalai.com/topic/3088/power-supply-faulty?_=1712638596553
https://forum.modalai.com/topic/2777/voxl-4-in-1-esc-smoking-on-bench-test-after-performing-calibration?_=1712638596557So, what I think is that your 12V supply is now no good. Hopefully the ESC itself is not damaged.
Are you able to change the source of your 12V to a proper battery instead?
However, before you do that, can you measure the resistance of the ESC + and - pads with a DMM (no power applied) and compare to a new or known good working unit?
If your ESC is damaged, it might shows itself as a low resistance reading across +/- pads. Normal ESCs should have a high resistance reading (it varies over time as the DMM is trying to charge the nodes, but it should be >100kohm more or less). Make sure red/positive lead on your DMM is on + and black/negative lead of the DMM is on - pad of ESC.We provide those power kits for users that do software benchtop development without motors.
Hi @Vinny,
thanks for your advice.
I've tested the chip with a 4s battery but nothing changed.The drone was (to my knowledge) never armed with the power plug - only with a 4s battery. For test purposes i spun only 1 rotor at a time at 100 rpm for max for 3-5 secs in order to see if they are working and if the configuration in qgroundcontrol is correct. Could this really be the reason the esc is broken? During a subsequent flight everything was working fine and after that the drone wasn't armed again for 3 months.
I measured the resistance between the two pads and it converges to:
- current esc: around 15 kohm
- spare part esc: 17.88 kohm
Since you mentioned these values should be above >100 kohm i assume i did something wrong? The drone is part of a scientific research project at my university thus we have only limited funding available and hence only one spare esc here right now.
Is there anything you can deduct from the resistance values?
Best wishes!
-
Hi @Vinny,
thanks for your advice.
I've tested the chip with a 4s battery but nothing changed.The drone was (to my knowledge) never armed with the power plug - only with a 4s battery. For test purposes i spun only 1 rotor at a time at 100 rpm for max for 3-5 secs in order to see if they are working and if the configuration in qgroundcontrol is correct. Could this really be the reason the esc is broken? During a subsequent flight everything was working fine and after that the drone wasn't armed again for 3 months.
I measured the resistance between the two pads and it converges to:
- current esc: around 15 kohm
- spare part esc: 17.88 kohm
Since you mentioned these values should be above >100 kohm i assume i did something wrong? The drone is part of a scientific research project at my university thus we have only limited funding available and hence only one spare esc here right now.
Is there anything you can deduct from the resistance values?
Best wishes!
Hi @K-Stute
as long as it's not low resistance (<1kohm), the TVS/Protection diode should still be functional. Otherwise, you could see a short <10-20 ohms).
Since you have the power module in parallel with the battery leads, it is likely you have a lower reading than mine, and your DMM may be using a different technique to charge the node, so I am not worried that you have a different reading.
I do think it is troubling that your voltage drops after it is turned ON, since that is indicative of some hardware issue downstream of the power supply, or the power supply itself cannot handle the load.When you use a battery, do you still see the input VBAT drop down to 6V?
Also, to confirm, you are using a VOXL 2 with the M0049/M0117/M0134 ESC and our Power Module at 5V, right?
I ask since nothing in that configuration refers to our products as "mini" so the post title may be a little confusing. So, just wanted to clarify.The advice from our team is to disassemble (unfortunately) each item and test individually with a known good working power supply so you can monitor the current. Especially since we do not want any HW issues to propagate and cause more damage to other devices in your system.
Then, when you re-assemble and connect motors, switch over to battery power.
Hope this helped.Thanks!
-
Hi @K-Stute
as long as it's not low resistance (<1kohm), the TVS/Protection diode should still be functional. Otherwise, you could see a short <10-20 ohms).
Since you have the power module in parallel with the battery leads, it is likely you have a lower reading than mine, and your DMM may be using a different technique to charge the node, so I am not worried that you have a different reading.
I do think it is troubling that your voltage drops after it is turned ON, since that is indicative of some hardware issue downstream of the power supply, or the power supply itself cannot handle the load.When you use a battery, do you still see the input VBAT drop down to 6V?
Also, to confirm, you are using a VOXL 2 with the M0049/M0117/M0134 ESC and our Power Module at 5V, right?
I ask since nothing in that configuration refers to our products as "mini" so the post title may be a little confusing. So, just wanted to clarify.The advice from our team is to disassemble (unfortunately) each item and test individually with a known good working power supply so you can monitor the current. Especially since we do not want any HW issues to propagate and cause more damage to other devices in your system.
Then, when you re-assemble and connect motors, switch over to battery power.
Hope this helped.Thanks!
Hey @Vinny,
sorry for not updating you on this. I have remeasured the voltage yesterday and today with a battery. I suddenly had 12 V again so idk what that was about.
Sry i copied the topic from some other thread and made an edit error ^^ I'm using a voxl 2 chip with a M0134 esc and a power module v2 kit.
Today i have switched the esc with the only spare part and it powered up again. But it didn't give enough power for all rotors to spin at the same rpm, leading the drone to do a backflip and break one of my rotor blades
 - maybe a software error (do you advice to recalibrate the esc params again after switching the esc?) that i made today. I'll check again tomorrow.
- maybe a software error (do you advice to recalibrate the esc params again after switching the esc?) that i made today. I'll check again tomorrow.Any advice on what to do with the orignial esc? Maybe i should test it with a laboratory power supply?
Hope this helps!
-
Hey @Vinny,
sorry for not updating you on this. I have remeasured the voltage yesterday and today with a battery. I suddenly had 12 V again so idk what that was about.
Sry i copied the topic from some other thread and made an edit error ^^ I'm using a voxl 2 chip with a M0134 esc and a power module v2 kit.
Today i have switched the esc with the only spare part and it powered up again. But it didn't give enough power for all rotors to spin at the same rpm, leading the drone to do a backflip and break one of my rotor blades
- maybe a software error (do you advice to recalibrate the esc params again after switching the esc?) that i made today. I'll check again tomorrow.Any advice on what to do with the orignial esc? Maybe i should test it with a laboratory power supply?
Hope this helps!
HI @K-Stute
Glad you made some progress.
You are welcome to try the RMA process for the ESC and we can help debug it for you.
Up to you, no guarantee we can fix it: https://www.modalai.com/pages/rmaAs for loading SW and Params, I am not the best resource for that, so I'll ask someone else to chime in, or please review the many forum posts related to loading ESC params.
-
Hey @Vinny,
sorry for not updating you on this. I have remeasured the voltage yesterday and today with a battery. I suddenly had 12 V again so idk what that was about.
Sry i copied the topic from some other thread and made an edit error ^^ I'm using a voxl 2 chip with a M0134 esc and a power module v2 kit.
Today i have switched the esc with the only spare part and it powered up again. But it didn't give enough power for all rotors to spin at the same rpm, leading the drone to do a backflip and break one of my rotor blades
- maybe a software error (do you advice to recalibrate the esc params again after switching the esc?) that i made today. I'll check again tomorrow.Any advice on what to do with the orignial esc? Maybe i should test it with a laboratory power supply?
Hope this helps!
@K-Stute
If you install a brand new ESC, it will not have the correct ESC params for your vehicle, so you should always install the latest firmware and the params that you calibrated for your motor / propeller.
You do not need to re-do the ESC calibration after installing a new ESC, but you do need to make sure that you are using the correct calibrated ESC params on the ESC.
Are you familiar with our
voxl-esctools for ESC programming and testing? https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tree/master/voxl-esc-toolsAs for the old ESC, please confirm that it is not working before sending back as RMA:
- disconnect everything from the ESC (including motors, uart connector), except for power cable
- use a power supply set to 12V (at least 1-2A), use a power supply that can display current draw of the device
- turn on power to the power supply and observe behavior of the ESC:
- do any blue LED blink, if so, note the blink pattern
- what is the current draw of the ESC after 2-3 seconds after power on
-
@K-Stute
If you install a brand new ESC, it will not have the correct ESC params for your vehicle, so you should always install the latest firmware and the params that you calibrated for your motor / propeller.
You do not need to re-do the ESC calibration after installing a new ESC, but you do need to make sure that you are using the correct calibrated ESC params on the ESC.
Are you familiar with our
voxl-esctools for ESC programming and testing? https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tree/master/voxl-esc-toolsAs for the old ESC, please confirm that it is not working before sending back as RMA:
- disconnect everything from the ESC (including motors, uart connector), except for power cable
- use a power supply set to 12V (at least 1-2A), use a power supply that can display current draw of the device
- turn on power to the power supply and observe behavior of the ESC:
- do any blue LED blink, if so, note the blink pattern
- what is the current draw of the ESC after 2-3 seconds after power on
@Alex-Kushleyev
Thanks for your advice.I'll look into the broken esc once my time schedule cleared up a bit and when my professor gives me the green light for the RMA since we need to allocate funding for that.
As for the new ESC. I flashed the new firmware modalai_esc_firmware_m0117_1_v0_39_RC10_eb6fb500 found herelink text. I also uploaded and verified the newly calibrated esc parameters. But the problem remains.
Using the voxl-esc-tools i can confirm that every motor spins in the right direction and that every motor spins at the given rpm.Still when arming with q-ground-control 2 of my 4 motors only spin up to about 4000 rpm while the other 2 motors sit at 14000 rpm (giving more throttle at this point leads the drone into doing a backflip). Do you have any advice on this? Sadly i wasn't able to find any related forum posts (if you have one in mind a link would be great)
-
@Alex-Kushleyev
Thanks for your advice.I'll look into the broken esc once my time schedule cleared up a bit and when my professor gives me the green light for the RMA since we need to allocate funding for that.
As for the new ESC. I flashed the new firmware modalai_esc_firmware_m0117_1_v0_39_RC10_eb6fb500 found herelink text. I also uploaded and verified the newly calibrated esc parameters. But the problem remains.
Using the voxl-esc-tools i can confirm that every motor spins in the right direction and that every motor spins at the given rpm.Still when arming with q-ground-control 2 of my 4 motors only spin up to about 4000 rpm while the other 2 motors sit at 14000 rpm (giving more throttle at this point leads the drone into doing a backflip). Do you have any advice on this? Sadly i wasn't able to find any related forum posts (if you have one in mind a link would be great)
@K-Stute , can you please share a px4 log of the "back flip", I can try to see if there is something wrong with PX4.
It is possible that your ESC mapping is not correct (modalai ESC uses a different ID convention than PX4), so you should use actuator test to actually verify the correct motors spin up (in correct physical location) and in correct direction (test without propellers).
The ESC mapping (between voxl esc and PX4 is done using params VOXL_ESC_FUNC(1-4) and directions are set using params VOXL_ESC_SDIR(1-4) (0 default, 1 reverse)
-
@K-Stute , can you please share a px4 log of the "back flip", I can try to see if there is something wrong with PX4.
It is possible that your ESC mapping is not correct (modalai ESC uses a different ID convention than PX4), so you should use actuator test to actually verify the correct motors spin up (in correct physical location) and in correct direction (test without propellers).
The ESC mapping (between voxl esc and PX4 is done using params VOXL_ESC_FUNC(1-4) and directions are set using params VOXL_ESC_SDIR(1-4) (0 default, 1 reverse)
@Alex-Kushleyev every esc should be correct and was tested using qgroundcontrol's actuator tab. I was able to get the drone to lift off in the "position mode". Idk why it did a backflip in manual. Since it is flying now i think i don't need further assistance. Thanks for your time!
-
@Alex-Kushleyev every esc should be correct and was tested using qgroundcontrol's actuator tab. I was able to get the drone to lift off in the "position mode". Idk why it did a backflip in manual. Since it is flying now i think i don't need further assistance. Thanks for your time!
@K-Stute , sounds great! if it happens again, let us know, we can debug.
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login