volx-mavlink-server PX4 Disconnected From UART
-
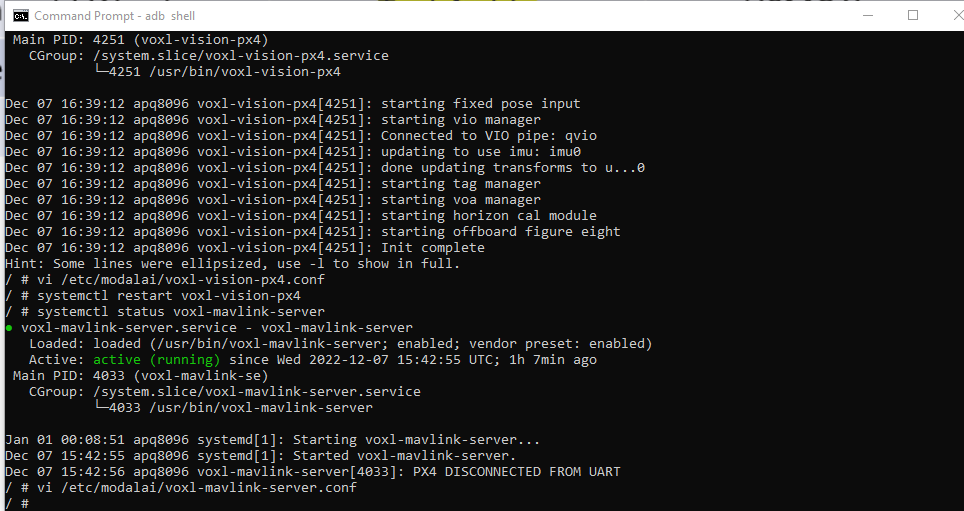
When I try to run voxl-mavlink-server I consistently get PX4 disconnect from UART.
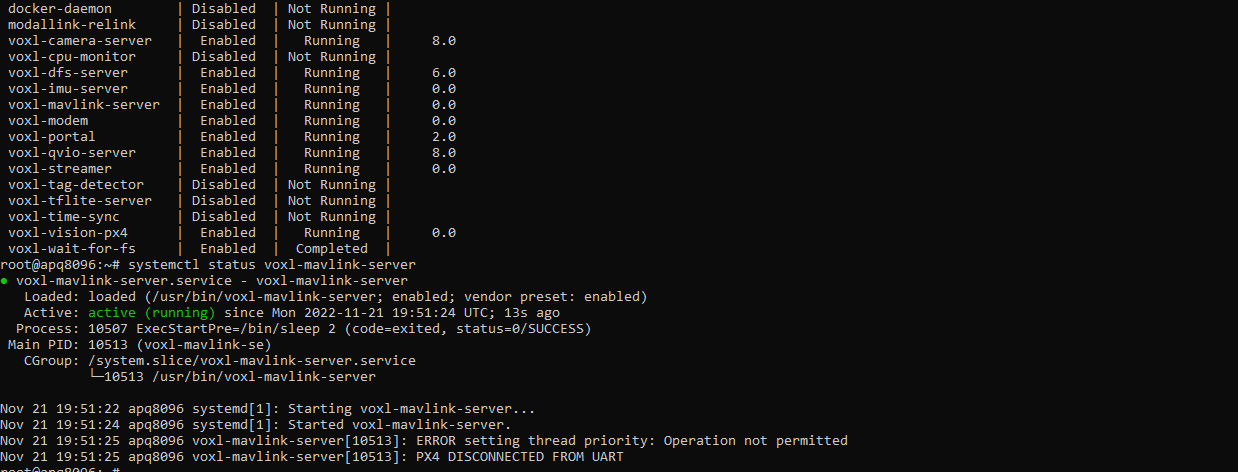
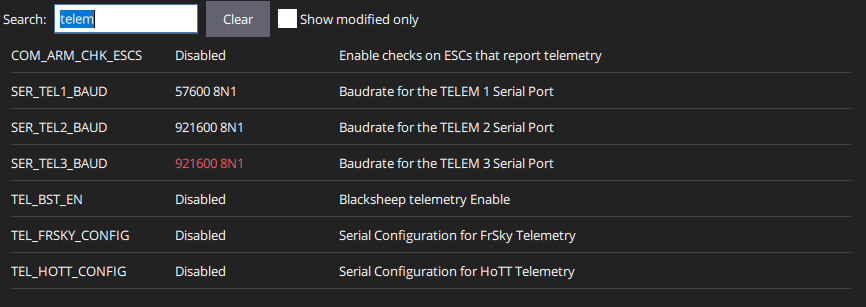
voxl-vision-px4 does not actually send mavlink message to QGC, except for the visual odometry message. That does go through.My PX4 parameters for proper serial all seem to be correct:


When I run the nuttx shell, the shell starts but I get no responses:

Flight Core PX4 version: 1.13.1
Voxl image version: 3.8.0My goal is to connect via a microhard setup. I have the microhard setup complete properly. I can ping the vehicles computer. I can see the visual odometry messages from vision-px4. I can SSH into the vehicle over microhard. I just can't start mavlink-server to get those sweet sweet mavlink messages flowing through the air. Any help would be appreciated, even if it's "your flight deck is bad, send it back and get a new one."
-
As an update, I downgraded the voxl image to 3.6.0 to see if there was some sort of incompatibility issue. It seems like on 3.8.0 voxl-vision-px4 does not do serve MAVLINK messages (that's why I must start mavlink-server.) On 3.6.0, voxl-vision-px4 attempts to serve MAVLINK but still returns the PX4 DISCONNECTED FROM UART error. So, still stumped, any insight would be helpful.
-
@modalab @Moderator @admin can someone help with this? We are testing this product for clients and if I can't even get comms working out of the gate it's kind of a bust. Your website says this is the spot to ask questions and there are no other means of technical help but it has been almost two weeks with no response. I just need AN answer. Did I get a bad unit? Is the firmware bad? Am I not giving enough info? Anything helps.
-
@zkern5254 I would recommend updating to VOXL Platform 0.9, which is our latest software release and is much newer than the software you're testing with.
The download can be found here: https://developer.modalai.com/asset/1
-
I don't work for ModalAI, but a few quick questions I have to try to help:
VOXL, VOXL Flight or VOXL2?
What port do you have your PX4 Autopilot/Flight Core plugged into if running a VOXL?
I recommend running a
voxl-configure-mpaand picking one of the options close to your platform or factory reset to configure the mavlink connection via UART for your platform. https://docs.modalai.com/voxl-configure-mpa/I would also check
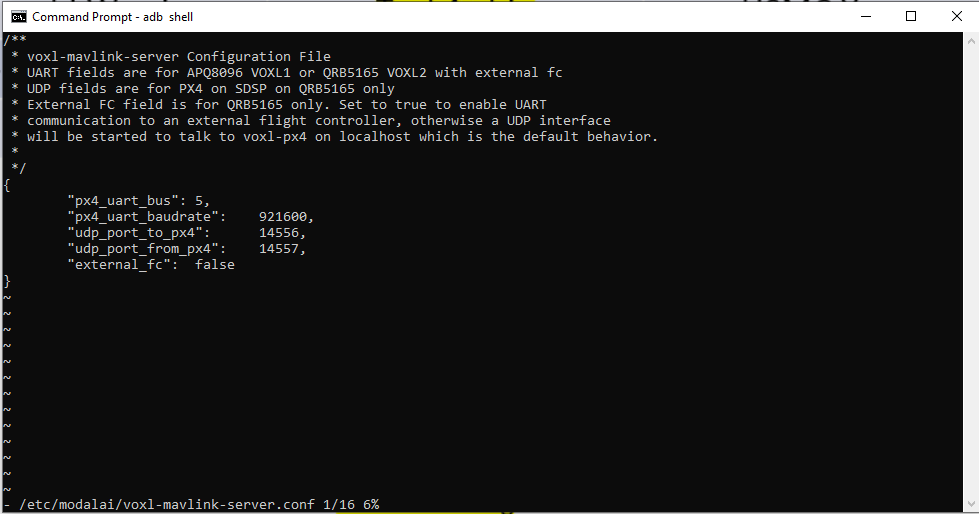
/etc/modalai/voxl-mavlink-server.confand make sure the telemetry port is set up.voxl-configure-mpashould do this for you, but just in case you should see something like:/** * voxl-mavlink-server Configuration File * UART fields are for APQ8096 VOXL1 or QRB5165 VOXL2 with external fc * UDP fields are for PX4 on SDSP on QRB5165 only * External FC field is for QRB5165 only. Set to true to enable UART * communication to an external flight controller, otherwise a UDP interface * will be started to talk to voxl-px4 on localhost which is the default behavior. * */ { "px4_uart_bus": 5, "px4_uart_baudrate": 921600, "udp_port_to_px4": 14556, "udp_port_from_px4": 14557, "external_fc": false }If you're running a VOXL with Flight Core, the connection is documented here: https://docs.modalai.com/how-to-connect-voxl-to-flight-core/
And the UART bus should be port 5 as shown in the config file above.
If you're using a Flight core, do you have blinking lights on it? Should be solid green, blinking blue.
I also recommend running image 3.9.0 based on our experience if you can make the upgrade.
Hope this helps!
-
@Steve-Turner Valid points, I'll check the voxl-configure-mpa but I'm pretty positive I've run that already. I'll give it a go anyways.
As for the mavlink-server config file. I've checked that so many times I see it in my sleep now.
I'm actually using the flight deck so all the connections aren't really up to me.
I'll try the upgrade.
-
@tom Thanks for answer! I'll give the upgrade a shot. That is probably the only thing I haven't tried yet. I should have mentioned in my original post also that I'm using a flight deck. I think that's why this is most confusing to me. All of the UART connections are board level so I can't be messing those up.
-
@zkern5254 Does your flight deck have an M0019 (VOXL-Flight) or does it have a dual board solution of M0006 (VOXL) and M0018 (Flight Core)? Just trying to determine if the UART connection is internal or through a cable.
-
@tom I have the M0019 version
-
@zkern5254 Okay cool, we do test the internal UART before shipping so unless some sort of issue occured post-shipment the hardware should be good.
-
@tom Copy that, I'll try the update and see if that fixes anything. We haven't modified the board or anything since receiving it so I'm not sure why something would have gone with the UART connection of all things.
-
@tom I updated to the newest firmware, then ran the voxl-configure-mpa wizard and I'm still getting PX4 DISCONNECTED FROM UART when I check the mavlink-server status. (I can see the visual odometry messages on wireshark, like before. Just not other mav messages.)
The mavlink-server config files looks like this:
And my px4 serial params look like this:
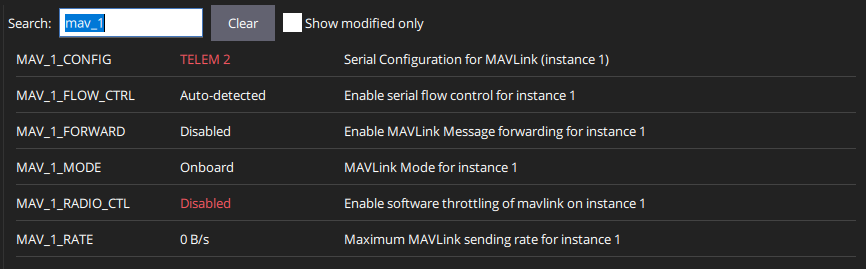
So still no dice.
-
@zkern5254 I'll see if I can get any other ideas from the team.