Tracking camera calibration not progressing
-
@Alex-Kushleyev Thanks, that definitely helped. I was able to get through calibration but I was moving the camera to track the board so I think there was too much motion, I tried again by keeping the camera stationary and moving the board but I was only able to get through 2 of the squares.
This one looks like it should have advanced?
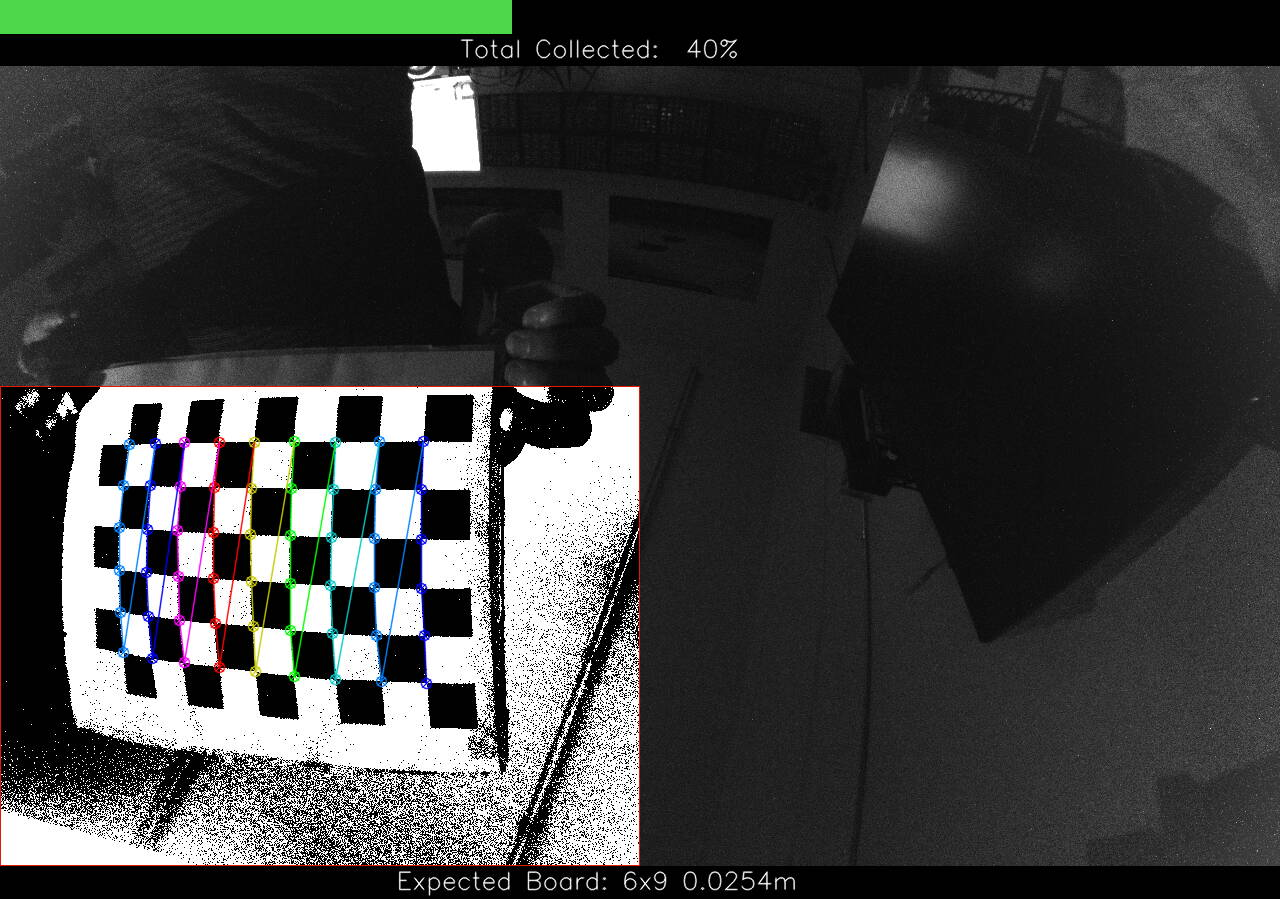
voxl2:~$ voxl-calibrate-camera tracking_down_misp_grey -f -s 6x9 -l 0.0254
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
Running Calibration...
Matrix
[467.7722718958223, 0, 643.0951201881879;
0, 465.4675015580457, 407.219312862067;
0, 0, 1]
Distortion
[0.06879494760256116;
-0.06189410980661297;
0.09295232529748904;
-0.03719414450439851]
distortion_model: fisheye
Re-projection error reported by calibrateCamera: 1.55185
Calibration Failed
Max reprojection error: 0.60
This is most likely due to motion blur, please try again.
Exiting CleanlyI went down to 30,25 % fill and was able to complete the calibration but I'm still getting the motion blur error.
voxl2:~$ voxl-calibrate-camera tracking_down_misp_grey -f -s 6x9 -l 0.0254
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
Running Calibration...
Matrix
[469.8268457990205, 0, 645.2242591682075;
0, 468.3299010304277, 405.5249057705095;
0, 0, 1]
Distortion
[0.04544429816970399;
-0.02133881952988525;
0.08318821819789667;
-0.04616442017968726]
distortion_model: fisheye
Re-projection error reported by calibrateCamera: 1.26416
Calibration Failed
Max reprojection error: 0.60
This is most likely due to motion blur, please try again.
Exiting Cleanly -
You should double check something - is your calibration pattern perfectly flat?
When I perform camera calibration, I use an LCD screen to display the pattern whenever possible, because the screes are typically very flat.
In order to avoid blurring, you could (temporarily) limit the upper end of the exposure range in volx-camera-server.conf to something like 5ms and that should help. This will cause the gain to be increased (automatically) to achieve the same i mage brightness, which will result in a bit more noise, but it should be ok. After calibration, you can set the upper exposure back. Alternatively, you can set the exposure / gain from voxl2 command line like so:
voxl-send-command tracking_down set_exp_gain 5.0 400(this should override the automatic exposure / gain control and set the exposure to 5ms and gain to 400 (4.0x analog gain).
If you are still using the printed pattern, increasing the illumination in the room should also help make the image brighter and drive the exposure down, reducing the blur.
Alex
-
@Alex-Kushleyev I initially tried using an LCD screen for the checkerboard, but the camera wasn't detecting it. Should I move the camera around when transitioning between boxes on the LCD screen?
Afterward, I reverted to the physical checkerboard and moved slowly during calibration. Additionally, I switched to the stereo camera configuration (https://docs.modalai.com/voxl2-camera-configs/#c-10-front-stereo-only-ov7251). Calibration completed successfully, and I was able to start the voxl-dfs-server (after renaming the intrinsics/extrinsics files to match the DFS configuration).
However, I'm still not seeing valid output data in the VOXL Portal. Both the DFS server status and journal logs appear normal. Any idea what might be causing this?
The orientation was labeled vertical in the extrinsics file, I updated it to horizontal since the cameras are mounted in that direction, I tried both.
voxl2:~$ voxl-calibrate-camera stereo -s 6x9 -l 0.0254 Waiting for valid pipe... Please open voxl-portal in a web browser to view the camera calibrator overlay stream Running Calibration... Calibrating Left Camera using intrinsics guess for ov7251 stereo cam Matrix [512.0490656858071, 0, 317.943082105687; 0, 512.9677676044445, 249.1010817824914; 0, 0, 1] Distortion [-0.2223760024137635; 0.2834698825913266; 0.006375005556120415; 0.001380405690556171; -0.3234049381178579] distortion_model: plumb_bob Re-projection error reported by calibrateCamera: 0.618295 Calibration Succeded! Calibrating Right Camera using intrinsics guess for ov7251 stereo cam Matrix [499.9941123870856, 0, 302.2300515222531; 0, 500.0159138740167, 197.2845691878148; 0, 0, 1] Distortion [-0.1920328131645855; 0.1661211129668493; -9.2603546772169e-06; -0.0005742159007090549; -0.1386842520292771] distortion_model: plumb_bob Re-projection error reported by calibrateCamera: 0.654897 Calibration Succeded! Calibrating Extrinsics 7 frames will be processed Processing non-fisheye stereo R [0.9998717783469182, -0.01301971984148091, 0.009322754990917012; 0.01315096821001574, 0.9998132816974246, -0.01415816995820597; -0.009136678855605861, 0.01427895782876463, 0.9998563059074108] T [-0.09106229154044132; 0.0003557888497092847; -0.01247277836064075] Re-projection error reported by stereoCalibrate: 0.921971 Detected horizontal stereo pair Distance between cameras: 0.0911 Extrinsics Calibration Succeded! Saved intrinsics to: /data/modalai/opencv_stereo_intrinsics.yml Saved extrinsics to: /data/modalai/opencv_stereo_extrinsics.yml Exiting Cleanly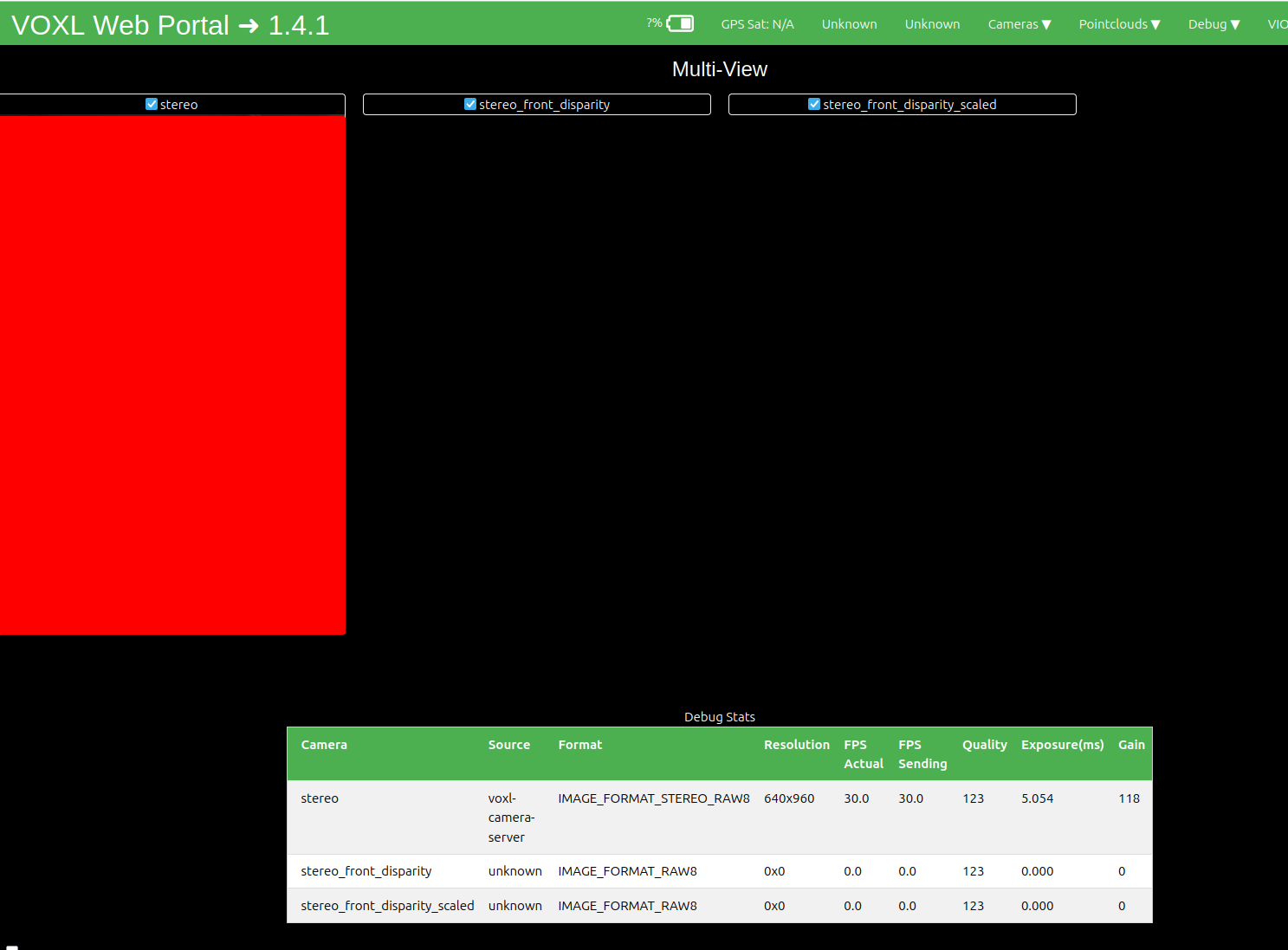
cat opencv_stereo_front_extrinsics.yml
%YAML:1.0 --- R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 9.9987177834691821e-01, -1.3019719841480912e-02, 9.3227549909170124e-03, 1.3150968210015740e-02, 9.9981328169742456e-01, -1.4158169958205966e-02, -9.1366788556058610e-03, 1.4278957828764632e-02, 9.9985630590741081e-01 ] T: !!opencv-matrix rows: 3 cols: 1 dt: d data: [ -9.1062291540441320e-02, 3.5578884970928471e-04, -1.2472778360640750e-02 ] reprojection_error: 9.2197082833254862e-01 orientation: vertical calibration_time: "2025-04-29 21:24:04"cat opencv_stereo_front_intrinsics.yml
%YAML:1.0 --- M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 5.1204906568580714e+02, 0., 3.1794308210568698e+02, 0., 5.1296776760444448e+02, 2.4910108178249143e+02, 0., 0., 1. ] D1: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -2.2237600241376348e-01, 2.8346988259132661e-01, 6.3750055561204149e-03, 1.3804056905561710e-03, -3.2340493811785792e-01 ] reprojection_error1: 6.1829492384868989e-01 M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9999411238708558e+02, 0., 3.0223005152225312e+02, 0., 5.0001591387401669e+02, 1.9728456918781478e+02, 0., 0., 1. ] D2: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.9203281316458551e-01, 1.6612111296684931e-01, -9.2603546772168998e-06, -5.7421590070905486e-04, -1.3868425202927714e-01 ] reprojection_error2: 6.5489679777844001e-01 width: 640 height: 480 distortion_model: plumb_bob calibration_time: "2025-04-29 21:24:04"