VOA in QGC
-
@keil do you mind giving us more details? What have you already loaded? Where is QGC saying collision prevention disabled?
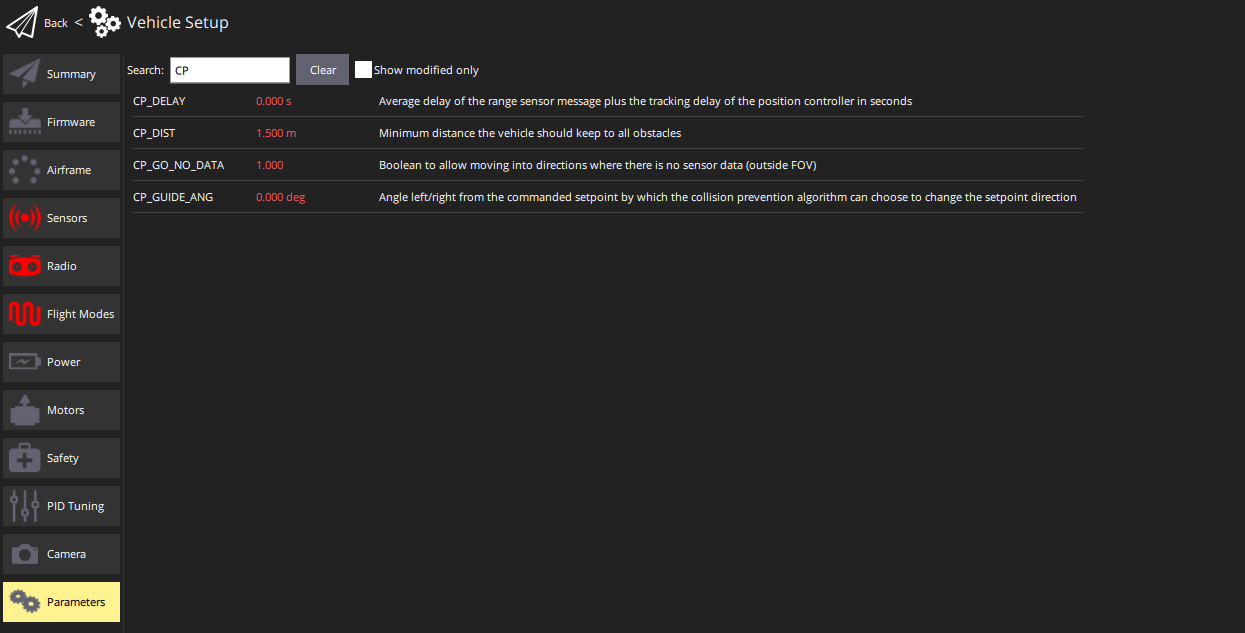
Usually, with voa enabled & running, voa parameters loaded in QGC, you can fly around in position flight mode & it'll prevent itself from running into anything ~1.5m unless that was edited. Only when it detects a potential collision will QGC say collision avoidance
-
@keil do you mind giving us more details? What have you already loaded? Where is QGC saying collision prevention disabled?
Usually, with voa enabled & running, voa parameters loaded in QGC, you can fly around in position flight mode & it'll prevent itself from running into anything ~1.5m unless that was edited. Only when it detects a potential collision will QGC say collision avoidance
-
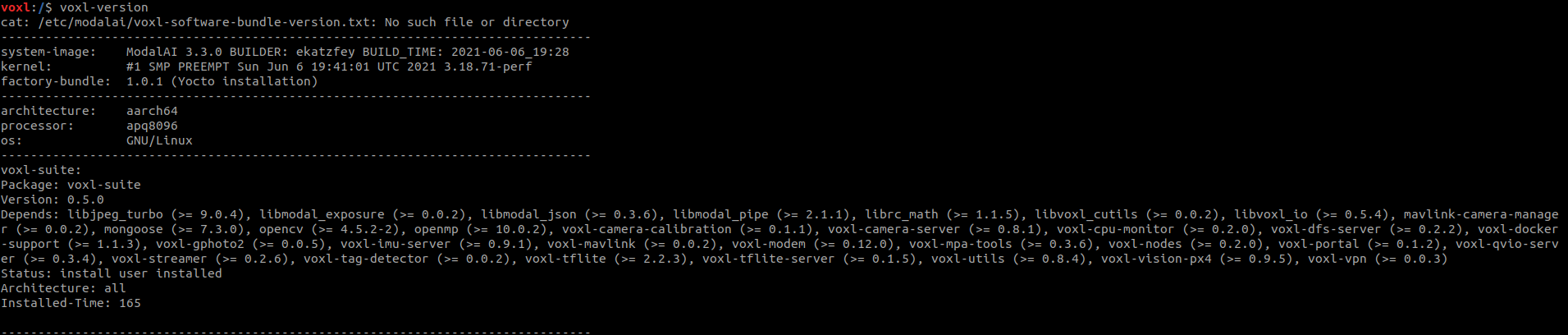
@keil Can you post a screen shot of
voxl-inspect-servicesas well as the CP_DIST page?
What system image/ voxl-suite are you running on the VOXL-CAM?
Just to ascertain, would you have already loaded the collision parameters from px4?
Have any safeties in QGC been added? Thinking that if any of the defaults were changed, could be causing issues with VOA.
@Jeremy-Schmidt or @James-Strawson any other pointers you can think of? -
@keil Can you post a screen shot of
voxl-inspect-servicesas well as the CP_DIST page?
What system image/ voxl-suite are you running on the VOXL-CAM?
Just to ascertain, would you have already loaded the collision parameters from px4?
Have any safeties in QGC been added? Thinking that if any of the defaults were changed, could be causing issues with VOA.
@Jeremy-Schmidt or @James-Strawson any other pointers you can think of? -
Hi Keil,
It looks like
voxl-dfs-serveris disabled, so not depth data is getting sent to VVPX4 (and thus qgc). Enabling and starting this service should provide depth data to the VOA manager. -
Hi Keil,
It looks like
voxl-dfs-serveris disabled, so not depth data is getting sent to VVPX4 (and thus qgc). Enabling and starting this service should provide depth data to the VOA manager.

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login