m500 motor replacement
-
Hi team,
Since my m500 motors got issues, I replaced all of them with the latest Holybro version https://shop.holybro.com/spare-parts-s500-v2-kit_p1251.html.It seems Holybro update the motors with a higher 920kv value. I am wondering if I need to modify any configuration for the changes in VOXL or will they work fine by just plug-and-play?
Also, should I do any ESC calibration or PWM connector checking after replacement? Do you have any calibration tools for motor checking in VOXL or it could be done via QGC?
Thanks.
-
I tried to fly with indoor settings, but it seems m500 cannot take off even I used max thrust. Please double-check the below video:
https://youtube.com/shorts/-aKPTE524uI?feature=shareThe story was that I got a crash last month. The frame broke and 2 of motors (CW pairs) were damaged. Please refer my previous post: https://forum.modalai.com/topic/1101/m500-motor-hot-and-vibration/7?_=1657365823867
The damaged motors lead to noisy sounds and jerking. So, I found the above 920kv version by Holybro. After the replacement, the jerking issue is almost gone, but it slightly remains when taking off and landing. The main issue is that m500 cannot take off, and it seems some calibration process is missing. Also, I found that m500 will shaking a bit with a higher thrust (low thrust is fine), please check this video:
https://youtube.com/shorts/6QrPMKwoohYPlease advise what I should do to fix it. Thanks.
-
I tried to fly with indoor settings, but it seems m500 cannot take off even I used max thrust. Please double-check the below video:
https://youtube.com/shorts/-aKPTE524uI?feature=shareThe story was that I got a crash last month. The frame broke and 2 of motors (CW pairs) were damaged. Please refer my previous post: https://forum.modalai.com/topic/1101/m500-motor-hot-and-vibration/7?_=1657365823867
The damaged motors lead to noisy sounds and jerking. So, I found the above 920kv version by Holybro. After the replacement, the jerking issue is almost gone, but it slightly remains when taking off and landing. The main issue is that m500 cannot take off, and it seems some calibration process is missing. Also, I found that m500 will shaking a bit with a higher thrust (low thrust is fine), please check this video:
https://youtube.com/shorts/6QrPMKwoohYPlease advise what I should do to fix it. Thanks.
-
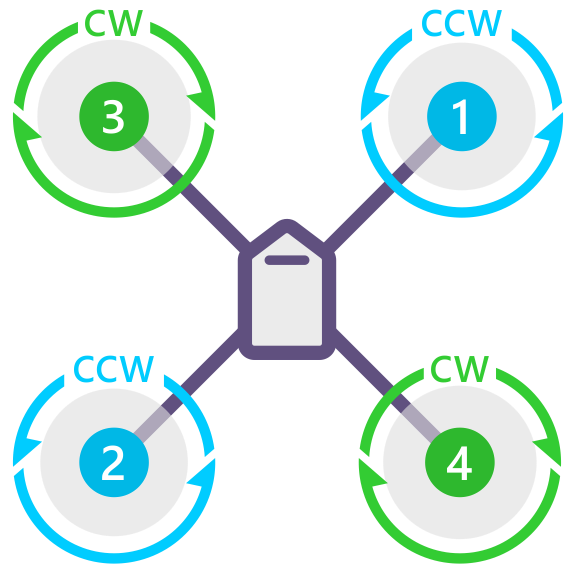
@yu-zhang the first thing I'd look at would be if all the motors are spinning the correct way. It should look like the image where the white tip motors are the counter-clock-wise & black tip motors are clock-wise:
You have two options to check spin direction, both require you to take the props off.
1: arm the drone & carefully touch the motor to verify spin
or
2: connect to QGC, go to MavLink console, & typemotor_test test -m 0 -p 15 # m reflects motor selection, start with 0, 1, 2, 3& to stop the spin, type:
motor_test stopIf motor is spinning opposite direction then flip any two motor wires.
After checking the correct spin direction, verify that each motor that spins follows like the image above.
With the drone matching the above image, front of the drone facing away from you, motor one should be front right, motor two should be bottom left, motor three top left and motor four should be bottom right.
If it doesn't match, change the esc wire from the breakout board. There are numbers on it & should line up with correct esc. -
@yu-zhang the first thing I'd look at would be if all the motors are spinning the correct way. It should look like the image where the white tip motors are the counter-clock-wise & black tip motors are clock-wise:
You have two options to check spin direction, both require you to take the props off.
1: arm the drone & carefully touch the motor to verify spin
or
2: connect to QGC, go to MavLink console, & typemotor_test test -m 0 -p 15 # m reflects motor selection, start with 0, 1, 2, 3& to stop the spin, type:
motor_test stopIf motor is spinning opposite direction then flip any two motor wires.
After checking the correct spin direction, verify that each motor that spins follows like the image above.
With the drone matching the above image, front of the drone facing away from you, motor one should be front right, motor two should be bottom left, motor three top left and motor four should be bottom right.
If it doesn't match, change the esc wire from the breakout board. There are numbers on it & should line up with correct esc.@Adrian-Hidalgo Thanks!
After checking, I found that all 4 motors spin in the same direction as below shown:
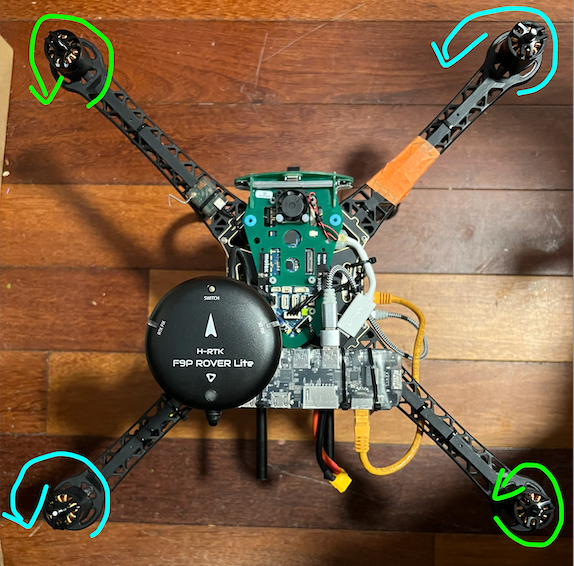
The issue is that the 3 and 4 motors spin in the wrong direction. And I double-checked the PWN breakout as below:
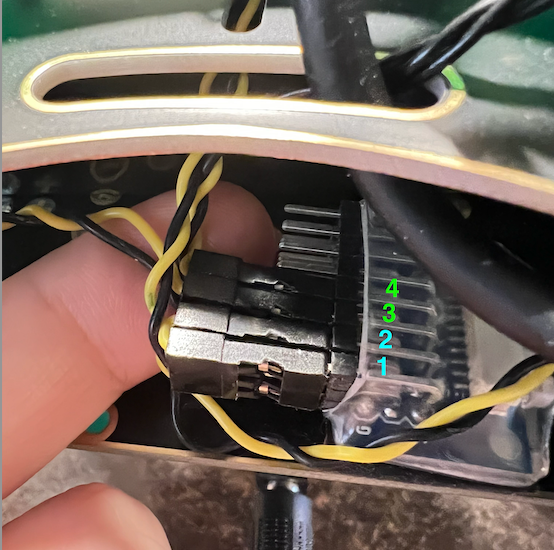
It seems I line up with the correct connection, right? E.g., from left to right, it shows 1, 2, 3, 4 connections with each motor. So, should the yellow wire be vertically above the black wire for each one? It should something wrong with the 3 and 4 connection, should I put it as 1, 2, 4,3?
-
@Adrian-Hidalgo Thanks!
After checking, I found that all 4 motors spin in the same direction as below shown:
The issue is that the 3 and 4 motors spin in the wrong direction. And I double-checked the PWN breakout as below:
It seems I line up with the correct connection, right? E.g., from left to right, it shows 1, 2, 3, 4 connections with each motor. So, should the yellow wire be vertically above the black wire for each one? It should something wrong with the 3 and 4 connection, should I put it as 1, 2, 4,3?
Hi @Adrian-Hidalgo, I finally realized why the issue happened.
I put a wrong wire connection between the CW pair with the esc connectors under the wings.
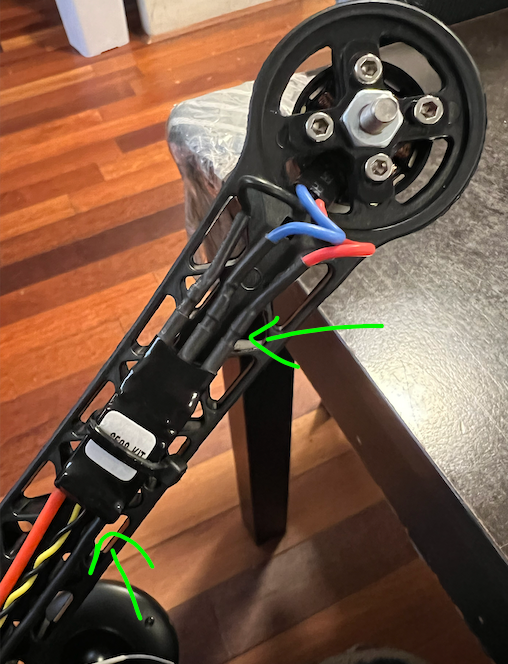
I used to connect the red wire to match the red connector of esc for all motors. That's why all motors spin in the same direction.
So, after checking one of old pictures I took for m500, I found both red and black wires should be reversely connected to the side of esc for the CW pair (3, 4). And the shaking issue is gone after this.
I didn't realize this detail before. All right, everything works well now. Thanks again for your help!

-
Hi team,
Since my m500 motors got issues, I replaced all of them with the latest Holybro version https://shop.holybro.com/spare-parts-s500-v2-kit_p1251.html.It seems Holybro update the motors with a higher 920kv value. I am wondering if I need to modify any configuration for the changes in VOXL or will they work fine by just plug-and-play?
Also, should I do any ESC calibration or PWM connector checking after replacement? Do you have any calibration tools for motor checking in VOXL or it could be done via QGC?
Thanks.
@yu-zhang Hi! I got quite confuse with this topic but, I would like to know. Did it work using the new Holybro motors with 920kv? I guess all the answers from Adrian were to get to make them work.
I ask because it has been difficult to find the motors I need for the m500.
Regards.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login