POSITION_TARGET_LOCAL_NED
-
Hey,
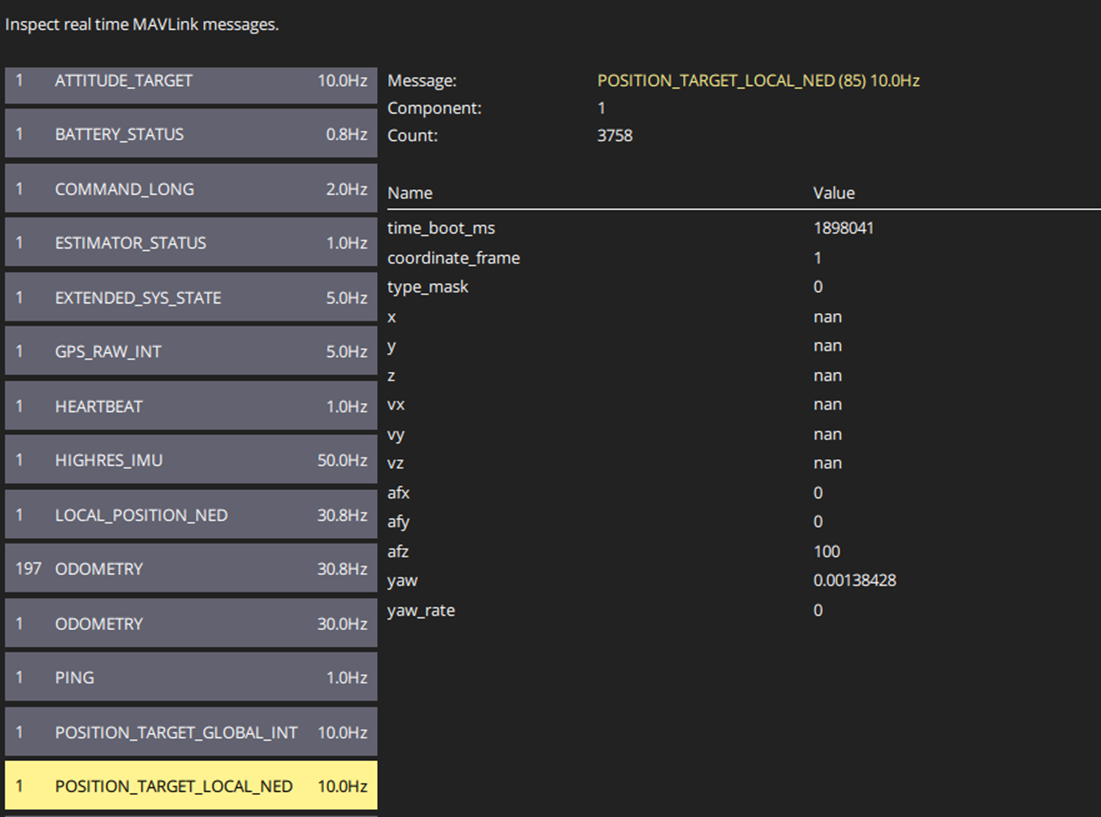
I am trying to enable the POSITION_TARGET_LOCAL_NED to work, and see it in QGC, what I am getting is nan even thou a couple of day ago it worked and I cant get it to work.I am using QGC V4.2.3
This is what I get :
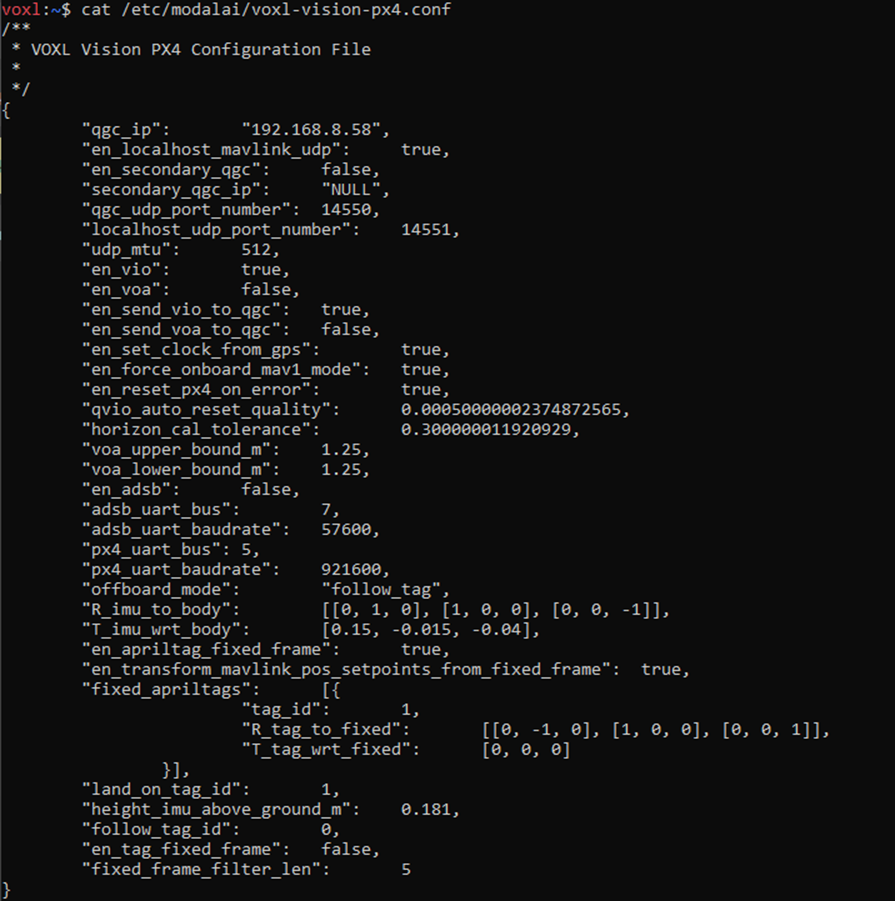
This is my conf file
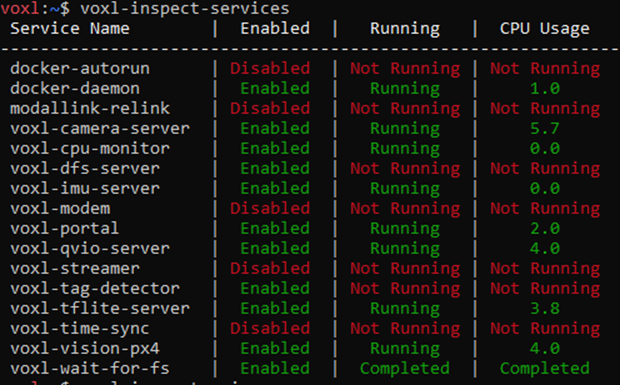
VOXL VIO is working :

I think that one of my problems is that the voxl-tag-detector is enabled but but running when I power on the system, I have not managed to enable that.
My end goal for right now is flying the quad indoor and have it land on a fiducial marker.
Thanks in advance.
-
Hey,
I am trying to enable the POSITION_TARGET_LOCAL_NED to work, and see it in QGC, what I am getting is nan even thou a couple of day ago it worked and I cant get it to work.I am using QGC V4.2.3
This is what I get :
This is my conf file
VOXL VIO is working :
I think that one of my problems is that the voxl-tag-detector is enabled but but running when I power on the system, I have not managed to enable that.
My end goal for right now is flying the quad indoor and have it land on a fiducial marker.
Thanks in advance.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login