offboard mode in voxl m500
-
Hello.
I am just wondering, in offboard mode there are any mode that difference than figure_eight ?? If not how I can write and add my own offboard mode to voxl m500.
Thank you!!! -
-
Thanks for the fast reply.
I want to use my own offboard mode so I change figure_eight in file config to OFF but when I tested QGC can't turn to offboard mode ?? -
-
Hi,
I still get some problem, first I change offboard_mode in config to OFF then I use my mavros file but it seem didn't work right. The UAV can only arm then disarm. when I check in Qgroundcontrol, I couldn't change to Offboard mode.I had tried again but it still didn't change. How to solve this problem??
Thank you -
Hi @mr-TOKI ,
Can you describe what your offboard setup is? Are you using one of the examples above (e.g. MAVROS or MAVSDK?).
If you're running the program remotely through SSH like our examples, you can see what the output is like this for CPP --> https://gitlab.com/voxl-public/voxl-docker-images/voxl-docker-mavsdk-cpp#run-example
Here's a video showing using python MAVSDK: https://www.youtube.com/watch?v=V3vVs8fEOZs
-
Hi @mr-TOKI ,
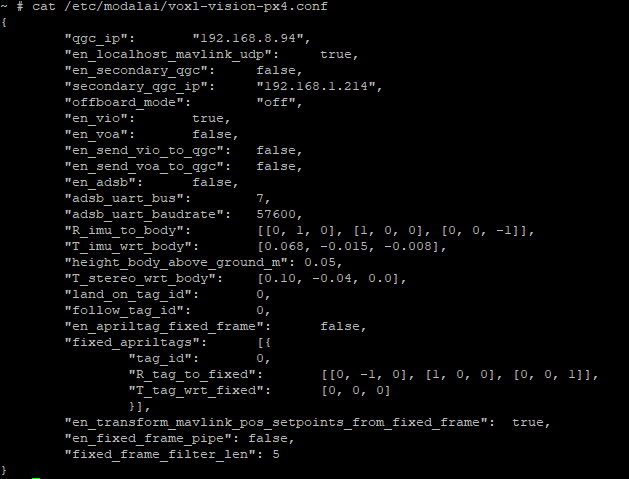
Yes agreed, in
voxl-vision-px4you have setup tooff. So this means that thevoxl-vision-px4program will not try to programmatically fly your m500.So, I believe you are now trying to run the MAVROS example, there's a step through guide here: https://docs.modalai.com/mavros/
Have you got to this step? https://docs.modalai.com/mavros/#test-mavros
What I'm getting at is, you won't use QGC to tell the m500 to go into "offboard mode". Your program will be responsible to do that. QGC will give you status updates throughout though.
-
Hi @mr-TOKI ,
Yes agreed, in
voxl-vision-px4you have setup tooff. So this means that thevoxl-vision-px4program will not try to programmatically fly your m500.So, I believe you are now trying to run the MAVROS example, there's a step through guide here: https://docs.modalai.com/mavros/
Have you got to this step? https://docs.modalai.com/mavros/#test-mavros
What I'm getting at is, you won't use QGC to tell the m500 to go into "offboard mode". Your program will be responsible to do that. QGC will give you status updates throughout though.
@modaltb said in offboard mode in voxl m500:
l-vision-px4 program
Oh I see, I had tried it worked with marvos, in offboard mode. But the altitude of voxl m500 was incorrect
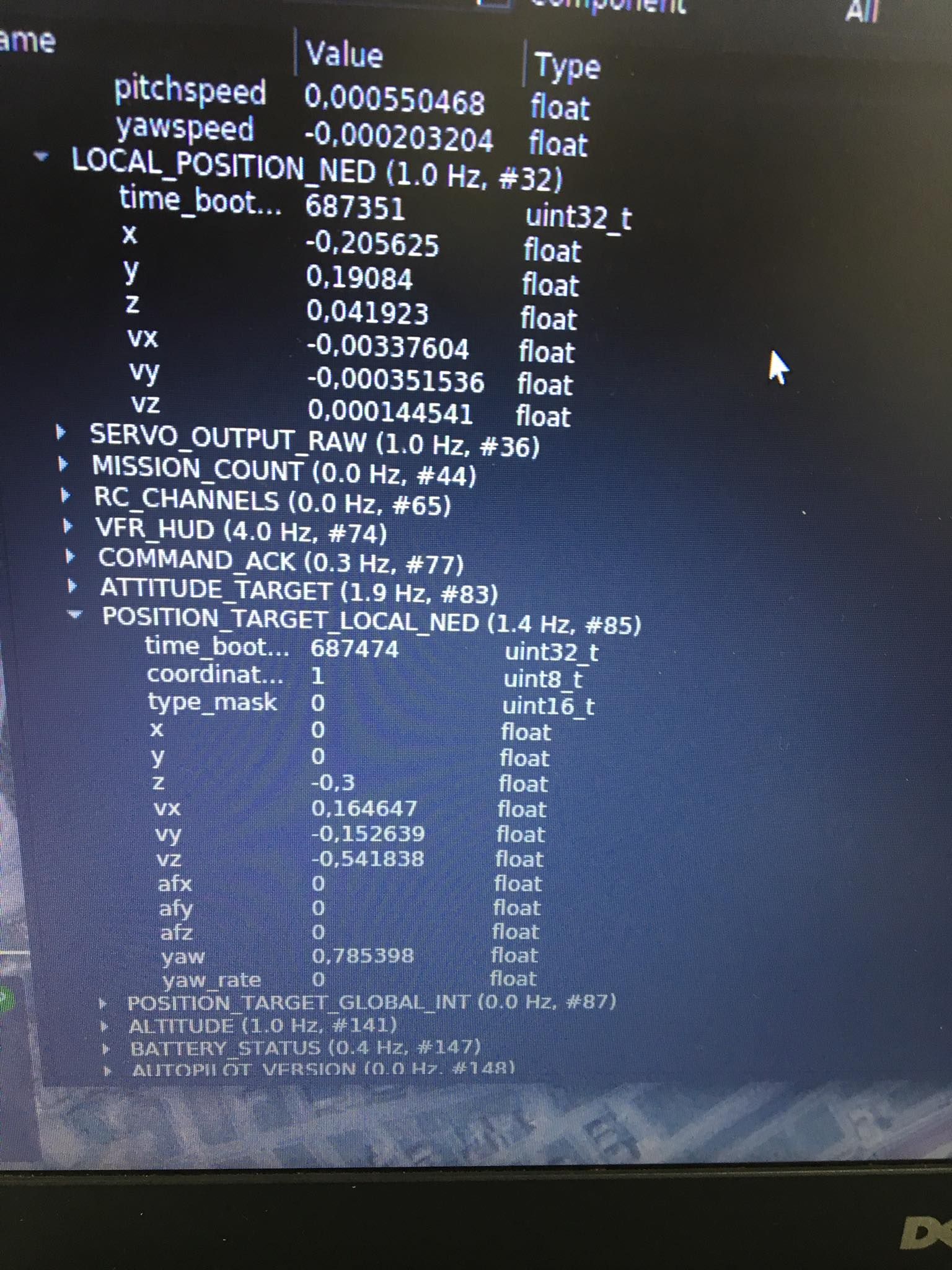
In my code, I set altitude is 0.3m and QGC show exactly (in POSITION_TARGET_LOCAL_NED) but m500 flew up to 0.5m, and sometime it sliped from home_position. Do you have any solution ?? -
@mr-TOKI ,
Are you taking off and trying to fly first to 0.3m?
Takeoff is a somewhat of a “jerky” maneuver. You can imagine that the flight controller will begin respond quickly, but there are still some factors that could make a takeoff “vary” and thus not have an immediate perfect response.
Takeoff and then a halt at 30cm is pretty aggressive.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login