Inquiry: Starling 2 Max — ROS2 / Jetson Orin Nano & RFID integration
-
Hello,
We are interested in this drone

Starling 2 Max GPS-denied Development Dronewith Battery Pack and Controller / Dual 4k & Dual Tracking (C28) / WiFi and ELRS
Product Specifications The Starling 2 Max is VOXL 2-powered, NDAA-compliant development drone supercharged by VOXL SDK specifically designed for computer vision-based, long-range dead reckoning with a 500g payload capacity. Powered by Blue UAS Framework autopilot, VOXL 2, the Starling 2 Max weighs 500g and boasts an im

ModalAI, Inc. (www.modalai.com)
Regarding this
"Open-source software: OpenCV, ROS 2, Docker, PX4 integrated flight controller"
In our current development drone, we have a Jetson NVDIA Orin Nano running the ROS2 development nodes. Can it be run on this drone? Secondly we have an RFID reader connected to the Jetson Orin Nano in our hardware today. Is connectivity possible with your drone?
Thank you,
Mustafa -
Hello,
We are interested in this drone
Starling 2 Max GPS-denied Development Dronewith Battery Pack and Controller / Dual 4k & Dual Tracking (C28) / WiFi and ELRS
Product Specifications The Starling 2 Max is VOXL 2-powered, NDAA-compliant development drone supercharged by VOXL SDK specifically designed for computer vision-based, long-range dead reckoning with a 500g payload capacity. Powered by Blue UAS Framework autopilot, VOXL 2, the Starling 2 Max weighs 500g and boasts an im
ModalAI, Inc. (www.modalai.com)
Regarding this
"Open-source software: OpenCV, ROS 2, Docker, PX4 integrated flight controller"
In our current development drone, we have a Jetson NVDIA Orin Nano running the ROS2 development nodes. Can it be run on this drone? Secondly we have an RFID reader connected to the Jetson Orin Nano in our hardware today. Is connectivity possible with your drone?
Thank you,
Mustafa@Mustafa_Cayci Yes, you can run ROS2 and OpenCV on a VOXL2. Can you give more details about the RFID reader? What type of I/O does it use? What type of software interfaces with the reader?
-
@Mustafa_Cayci Yes, you can run ROS2 and OpenCV on a VOXL2. Can you give more details about the RFID reader? What type of I/O does it use? What type of software interfaces with the reader?
@Eric-Katzfey Currently the RFID reader connects to Jetson using a USB cable. We have API to access the RFID reader and read the RFID tags. We then process them in ROS2 nodes.
Does VOXL2 use Ubuntu Linux? Document also mentioned Docker. We should be able to load our docker image on VOXL2 as well.
My other concern is the bulkiness of the RFID antenna. It is 15 cm by 15 cm. I am wondering how we would be able to mount on the drone.
Mustafa
-
@Eric-Katzfey Currently the RFID reader connects to Jetson using a USB cable. We have API to access the RFID reader and read the RFID tags. We then process them in ROS2 nodes.
Does VOXL2 use Ubuntu Linux? Document also mentioned Docker. We should be able to load our docker image on VOXL2 as well.
My other concern is the bulkiness of the RFID antenna. It is 15 cm by 15 cm. I am wondering how we would be able to mount on the drone.
Mustafa
@Mustafa_Cayci You would need an accessory board that exposes a USB port for you to connect. Yes, VOXL2 has Ubuntu / Docker capability.
-
@Mustafa_Cayci You would need an accessory board that exposes a USB port for you to connect. Yes, VOXL2 has Ubuntu / Docker capability.
@Eric-Katzfey said in Inquiry: Starling 2 Max — ROS2 / Jetson Orin Nano & RFID integration:
accessory board that exposes a USB port for you to connect.
Hi @Eric-Katzfey Just to confirm ... you are referring to this page where there are those boards mentioned.

Expansion Boards
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
I need one USB-C and two USB 3.0 ports so total 3 ports. Is there one board that allows three ports? Or do I need to one or more boards?
Secondly I am connecting PixHawk to Jetson today with Ethernet connection to minimize the data bottleneck. How do I do this with VOXL2?
Thank you for your time.
Mustafa
-
@Eric-Katzfey said in Inquiry: Starling 2 Max — ROS2 / Jetson Orin Nano & RFID integration:
accessory board that exposes a USB port for you to connect.
Hi @Eric-Katzfey Just to confirm ... you are referring to this page where there are those boards mentioned.
Expansion Boards
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
I need one USB-C and two USB 3.0 ports so total 3 ports. Is there one board that allows three ports? Or do I need to one or more boards?
Secondly I am connecting PixHawk to Jetson today with Ethernet connection to minimize the data bottleneck. How do I do this with VOXL2?
Thank you for your time.
Mustafa
@Mustafa_Cayci You can run PX4 directly on VOXL2. Do you still need the external Pixhawk? When you say USB-C is that the connector that is already on VOXL3 for adb?
-
@Mustafa_Cayci You can run PX4 directly on VOXL2. Do you still need the external Pixhawk? When you say USB-C is that the connector that is already on VOXL3 for adb?
Hi @Eric-Katzfey,
I did not realize that the VOXL2 has already built in PX4 as well as Qualcomm AI Engine. Effectively, it replaces our Jetson Orin Nano all together.
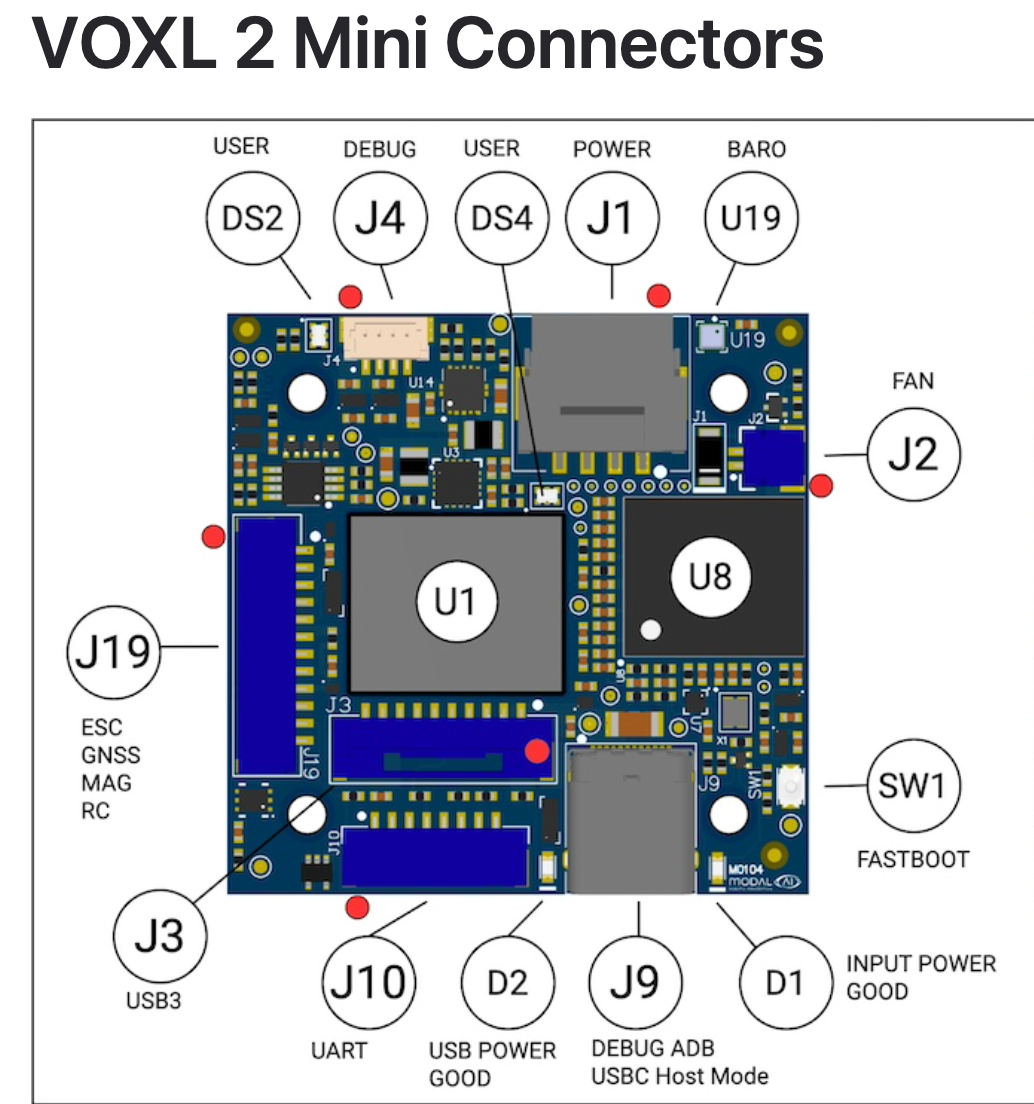
Is J9 USB-C connector shown in the following screen capture?
Mustafa
-
Hi @Eric-Katzfey,
I did not realize that the VOXL2 has already built in PX4 as well as Qualcomm AI Engine. Effectively, it replaces our Jetson Orin Nano all together.
Is J9 USB-C connector shown in the following screen capture?
Mustafa
@Mustafa_Cayci Yes, J9 is shown. That is for an adb connection. What were you intending to use it for?
-
@Mustafa_Cayci Yes, J9 is shown. That is for an adb connection. What were you intending to use it for?
@Eric-Katzfey I have an Orbbec depth camera (USB‑C) that we use for object detection and AprilTag detection. Do we still need the Orbbec camera, or do the Starling 2 or Stinger already include a depth camera?
Thank you,
Mustafa -
@Eric-Katzfey I have an Orbbec depth camera (USB‑C) that we use for object detection and AprilTag detection. Do we still need the Orbbec camera, or do the Starling 2 or Stinger already include a depth camera?
Thank you,
Mustafa@Mustafa_Cayci You can get the Starling 2 Max with a ToF sensor for depth mapping indoors (The sensors don't really work outdoors). https://www.modalai.com/products/starling-2-max?variant=49129974923568
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login