Teledyne FLIR Lepton 3.5 Integration
-
Hi,
I was looking to integrate the Teledyne FLIR Lepton 3.5 onto the Starling 2 UAV (running PX4) using SPI/I2C. Could you advise on the steps involved? Would this need any driver level modifications or is sufficient to configure certain pre-defined parameters?
Thanks!
-
Hi,
I was looking to integrate the Teledyne FLIR Lepton 3.5 onto the Starling 2 UAV (running PX4) using SPI/I2C. Could you advise on the steps involved? Would this need any driver level modifications or is sufficient to configure certain pre-defined parameters?
Thanks!
Please take a look at this document : https://docs.modalai.com/voxl2-d0014/#downward-range-finder-and-flir-lepton
You will need M0157 adapter + actual Lepton sensor. The M0157 adapter will plug into the M0173 camera front end. Then it will be pretty much plug and play.
Let me check how to get M0157 - it does not appear to be in the shop.
Alex
-
Please take a look at this document : https://docs.modalai.com/voxl2-d0014/#downward-range-finder-and-flir-lepton
You will need M0157 adapter + actual Lepton sensor. The M0157 adapter will plug into the M0173 camera front end. Then it will be pretty much plug and play.
Let me check how to get M0157 - it does not appear to be in the shop.
Alex
@george-kollamkulam , can you please check if you already have the M0157 adapter installed in your Starling 2?

Just for completeness, we are updating M0157 to M0187 which has identical functionality but also has additional i2c-gpio circuit to perform a hardware reset of lepton and tof sensor if needed. Also a small change in dimensions.
However, if you already have M0157, which you should, it should work just fine.
Alex
-
@george-kollamkulam , can you please check if you already have the M0157 adapter installed in your Starling 2?
Just for completeness, we are updating M0157 to M0187 which has identical functionality but also has additional i2c-gpio circuit to perform a hardware reset of lepton and tof sensor if needed. Also a small change in dimensions.
However, if you already have M0157, which you should, it should work just fine.
Alex
@Alex-Kushleyev thanks, I have the M0157 adapter installed on my Starling 2.
-
@george-kollamkulam , can you please check if you already have the M0157 adapter installed in your Starling 2?
Just for completeness, we are updating M0157 to M0187 which has identical functionality but also has additional i2c-gpio circuit to perform a hardware reset of lepton and tof sensor if needed. Also a small change in dimensions.
However, if you already have M0157, which you should, it should work just fine.
Alex
@Alex-Kushleyev It looks like our Starling 2 UAV has the M0157 adapter, the M0173 board (Yellow PCB that also connects to the 3 AR0144 sensors and the TOF sensor), and the 7pin cable that connects the M0157 adapter to the M0173 board. Just to clarify, this configuration is sufficient to integrate (plug-and-play) the Teledyne FLIR Lepton 3.5 without modifying the drivers? If not, do you have any recommended thermal sensors that can directly fit into this hardware and software architecture? I'd be happy to buy them.
-
@Alex-Kushleyev It looks like our Starling 2 UAV has the M0157 adapter, the M0173 board (Yellow PCB that also connects to the 3 AR0144 sensors and the TOF sensor), and the 7pin cable that connects the M0157 adapter to the M0173 board. Just to clarify, this configuration is sufficient to integrate (plug-and-play) the Teledyne FLIR Lepton 3.5 without modifying the drivers? If not, do you have any recommended thermal sensors that can directly fit into this hardware and software architecture? I'd be happy to buy them.
@george-kollamkulam , yes FLIR Lepton 3.5 just inserts into M0157 board which has the socket for the bare Lepton sensor.
Once you install the sensor into the docket, boot up voxl2 and run
voxl-lepton-server. It will autogenerate a default config file/etc/modalai/voxl-lepton-server.confthat will look like this.{ "spi_bus": 14, "spi_speed": 16000000, "en_i2c": false, "i2c_bus": 0, "shutter_mode": "auto", "flow_shutter_s": 20, "closePeriodInFramesInAir": 1, "openPeriodInFramesInAir": 0, "desiredFfcPeriodMsInAir": 360000, "desiredFfcTempDeltaCentiDegInAir": 600, "en_rotate": false }You will need to change the SPI bus to 0 and , set
en_i2cto true and i2c_bus to 4 because this is the configuration for this Hardware arrangement (M0173 + M0157) per the following documentation : https://docs.modalai.com/voxl2-d0014/#downward-range-finder-and-flir-leptonThen you can run
voxl-lepton-serveragain in foreground or enable the systemd server usingsystemctl enable voxl-lepton-serverandsystemctl start voxl-lepton-server. After that you shoud be able to see the Lepton output usingvoxl-portal.Alex
-
@george-kollamkulam , yes FLIR Lepton 3.5 just inserts into M0157 board which has the socket for the bare Lepton sensor.
Once you install the sensor into the docket, boot up voxl2 and run
voxl-lepton-server. It will autogenerate a default config file/etc/modalai/voxl-lepton-server.confthat will look like this.{ "spi_bus": 14, "spi_speed": 16000000, "en_i2c": false, "i2c_bus": 0, "shutter_mode": "auto", "flow_shutter_s": 20, "closePeriodInFramesInAir": 1, "openPeriodInFramesInAir": 0, "desiredFfcPeriodMsInAir": 360000, "desiredFfcTempDeltaCentiDegInAir": 600, "en_rotate": false }You will need to change the SPI bus to 0 and , set
en_i2cto true and i2c_bus to 4 because this is the configuration for this Hardware arrangement (M0173 + M0157) per the following documentation : https://docs.modalai.com/voxl2-d0014/#downward-range-finder-and-flir-leptonThen you can run
voxl-lepton-serveragain in foreground or enable the systemd server usingsystemctl enable voxl-lepton-serverandsystemctl start voxl-lepton-server. After that you shoud be able to see the Lepton output usingvoxl-portal.Alex
@Alex-Kushleyev thanks, this seems to be working well. Can you also share what voxl-lepton-tracker is used for?
George
-
@Alex-Kushleyev thanks, this seems to be working well. Can you also share what voxl-lepton-tracker is used for?
George
@george-kollamkulam , the lepton tracker is an implementation of optic flow tracker for the lepton data, you can see the details here : https://gitlab.com/voxl-public/voxl-sdk/services/voxl-lepton-tracker/-/blob/master/src/feature_tracker.cpp
-
@george-kollamkulam , the lepton tracker is an implementation of optic flow tracker for the lepton data, you can see the details here : https://gitlab.com/voxl-public/voxl-sdk/services/voxl-lepton-tracker/-/blob/master/src/feature_tracker.cpp
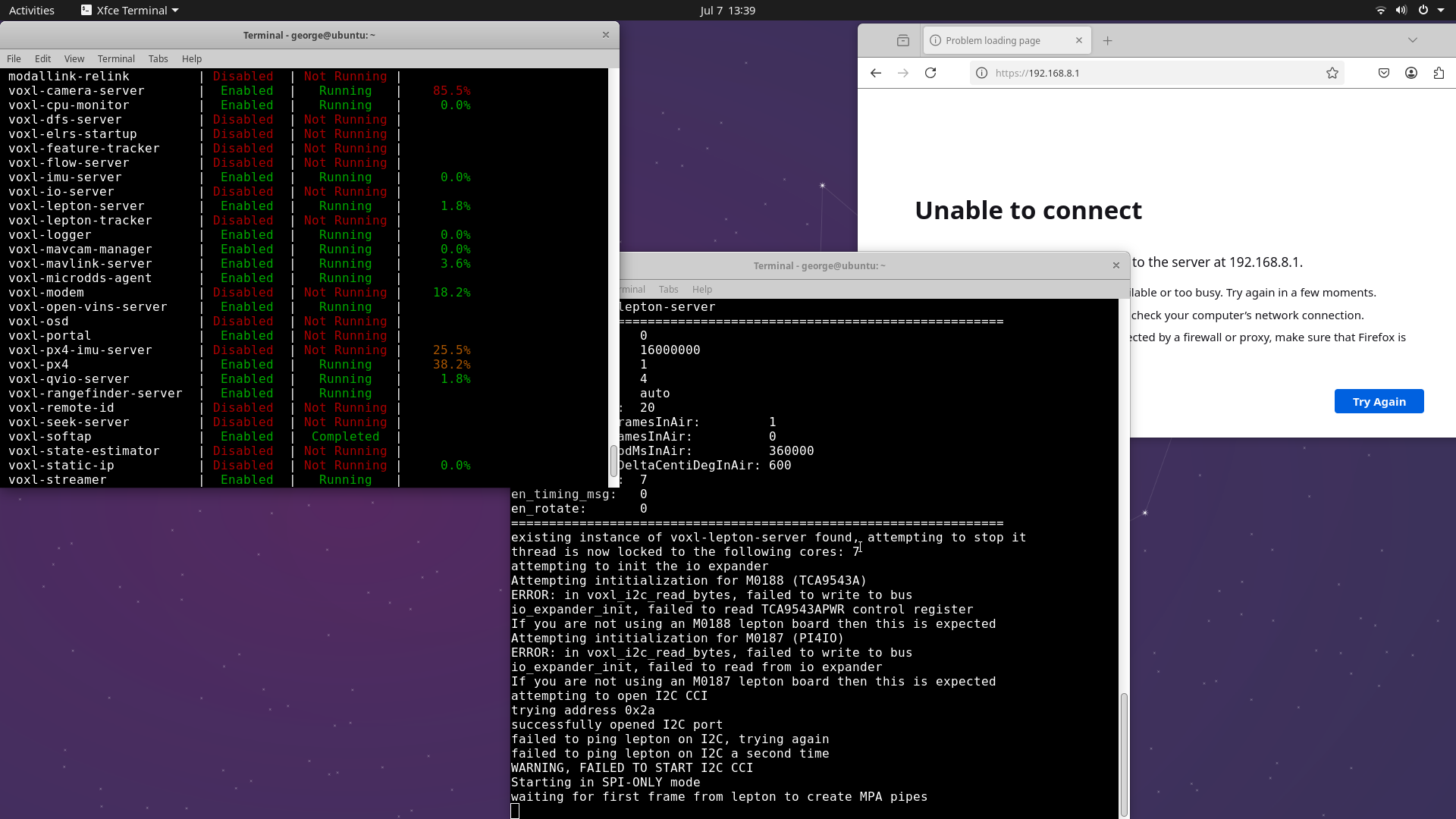
@Alex-Kushleyev I tried using the Lepton 3.5 sensor again, but this time I was unable to see the feed on the voxl portal, although voxl-lepton-server and voxl-camera-services were running. Additionally, I couldn't hear the clicking sound from the lepton sensor that was previously present. What could be the issue here? Is there anything I'm missing?
I also noticed that the rear tracking camera wasn't functional (I'm not sure if this is related to the functioning of the lepton camera). It was seen on the voxl system check page on the voxl portal.
-
@Alex-Kushleyev I tried using the Lepton 3.5 sensor again, but this time I was unable to see the feed on the voxl portal, although voxl-lepton-server and voxl-camera-services were running. Additionally, I couldn't hear the clicking sound from the lepton sensor that was previously present. What could be the issue here? Is there anything I'm missing?
I also noticed that the rear tracking camera wasn't functional (I'm not sure if this is related to the functioning of the lepton camera). It was seen on the voxl system check page on the voxl portal.
@george-kollamkulam , are you saying that just the Lepton and the tracking cameras are not working now, but all the other cameras are working fine?
voxl-camera-serverandvoxl-lepton-serverare completely independent and should not be interfering. However, Please try to unplug the lepton sensor from M0173 board and see if the tracking camera starts working again.it seems like maybe there is some power issue, since lepton is not clicking, since it should be doing that as soon as it gets power.
Alex
-
@george-kollamkulam , are you saying that just the Lepton and the tracking cameras are not working now, but all the other cameras are working fine?
voxl-camera-serverandvoxl-lepton-serverare completely independent and should not be interfering. However, Please try to unplug the lepton sensor from M0173 board and see if the tracking camera starts working again.it seems like maybe there is some power issue, since lepton is not clicking, since it should be doing that as soon as it gets power.
Alex
@Alex-Kushleyev I did a power cycle on the lepton sensor and it seems to be working now (click sound and feed available). All cameras except the rear tracking camera seems to be working fine (screenshot attached below). It doesn't show up on the voxl portal. How can we resolve this?
-
@Alex-Kushleyev I did a power cycle on the lepton sensor and it seems to be working now (click sound and feed available). All cameras except the rear tracking camera seems to be working fine (screenshot attached below). It doesn't show up on the voxl portal. How can we resolve this?
@george-kollamkulam , can you please provide output of “voxl-camera-server -l”? This will show us which cameras are detected (excluding lepton). Note that running this command will stop the camera server if it is running in the background.
-
@george-kollamkulam , can you please provide output of “voxl-camera-server -l”? This will show us which cameras are detected (excluding lepton). Note that running this command will stop the camera server if it is running in the background.
@Alex-Kushleyev
existing instance of voxl-camera-server found, attempting to stop it
Number of cameras detected: 4On the voxl portal system check, it returned false for tracking_rear (VOXL-Camera-Server) and error for imageSensor2 (VOXL Image Sensors).
 -
@Alex-Kushleyev
existing instance of voxl-camera-server found, attempting to stop it
Number of cameras detected: 4On the voxl portal system check, it returned false for tracking_rear (VOXL-Camera-Server) and error for imageSensor2 (VOXL Image Sensors).
You are using a version of SDK which had a bug that was suppressing most of the prints, so
voxl-camera-server -lis not reporting any information.To fix this, please use the latest version of libmodal-journal package (you can get it from here : http://voxl-packages.modalai.com/dists/qrb5165/dev/binary-arm64//libmodal-journal_0.2.6-202505081055_arm64.deb
How many cameras do you actually have on your Starling 2? is it 4? Two tracking, one Hires camera and on TOF?
Alex
-
You are using a version of SDK which had a bug that was suppressing most of the prints, so
voxl-camera-server -lis not reporting any information.To fix this, please use the latest version of libmodal-journal package (you can get it from here : http://voxl-packages.modalai.com/dists/qrb5165/dev/binary-arm64//libmodal-journal_0.2.6-202505081055_arm64.deb
How many cameras do you actually have on your Starling 2? is it 4? Two tracking, one Hires camera and on TOF?
Alex
@Alex-Kushleyev apart from the lepton sensor, I have 5 (1 hires, 1 tof and 3 tracking).
Can you please point me to the resource that explains how to update the libmodal-journal package? Would I need to reinstall ROS2 Foxy or anything else?
Thanks,
George -
@Alex-Kushleyev apart from the lepton sensor, I have 5 (1 hires, 1 tof and 3 tracking).
Can you please point me to the resource that explains how to update the libmodal-journal package? Would I need to reinstall ROS2 Foxy or anything else?
Thanks,
George@george-kollamkulam , in order to install the updated libmodal-journal package, you just download the file that i linked to VOXL2, lets say you put it in
/home/root/.Then, using adb you go to
/home/rootand execute:dpkg -i libmodal-journal_0.2.6-202505081055_arm64.debThen you just run
voxl-camera-server -land you should see a lot more information being printed.Alex
-
@george-kollamkulam , in order to install the updated libmodal-journal package, you just download the file that i linked to VOXL2, lets say you put it in
/home/root/.Then, using adb you go to
/home/rootand execute:dpkg -i libmodal-journal_0.2.6-202505081055_arm64.debThen you just run
voxl-camera-server -land you should see a lot more information being printed.Alex
@Alex-Kushleyev here's the system response.
voxl2:/$ cd /home/root
voxl2:~$ dpkg -i libmodal-journal_0.2.6-202505081055_arm64.deb
(Reading database ... 137565 files and directories currently installed.)
Preparing to unpack libmodal-journal_0.2.6-202505081055_arm64.deb ...
Unpacking libmodal-journal (0.2.6-202505081055) over (0.2.5) ...
Setting up libmodal-journal (0.2.6-202505081055) ...
Processing triggers for libc-bin (2.27-3ubuntu1.6) ...
voxl2:~$ dpkg -l | grep libmodal-journal
ii libmodal-journal 0.2.6-202505081055 arm64 Journaling library
voxl2:~$ voxl-camera-server -l
existing instance of voxl-camera-server found, attempting to stop it
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 4DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Cam idx: 1, Cam slot: 1, Slave Address: 0x0034, Sensor Id: 0x0577
DEBUG: Cam idx: 2, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975
DEBUG: Cam idx: 3, Cam slot: 6, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Note: This list comes from the HAL module and may not be indicative
DEBUG: of configurations that have full pipelinesDEBUG: Number of cameras: 4
====================================
Stats for camera: 0ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Stats for camera: 1ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
4056 x 3040
3840 x 2160
1920 x 1080
1920 x 1080
1920 x 1080
1280 x 720
1280 x 720ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
4056 x 3040 HAL_PIXEL_FORMAT_YCbCr_420_888
4056 x 3040 HAL_PIXEL_FORMAT_BLOB
4000 x 3000 HAL_PIXEL_FORMAT_YCbCr_420_888
4000 x 3000 HAL_PIXEL_FORMAT_BLOB
3840 x 2160 HAL_PIXEL_FORMAT_YCbCr_420_888
3840 x 2160 HAL_PIXEL_FORMAT_BLOB
3264 x 2448 HAL_PIXEL_FORMAT_YCbCr_420_888
3264 x 2448 HAL_PIXEL_FORMAT_BLOB
3200 x 2400 HAL_PIXEL_FORMAT_YCbCr_420_888
3200 x 2400 HAL_PIXEL_FORMAT_BLOB
2976 x 2976 HAL_PIXEL_FORMAT_YCbCr_420_888
2976 x 2976 HAL_PIXEL_FORMAT_BLOB
2688 x 1512 HAL_PIXEL_FORMAT_YCbCr_420_888
2688 x 1512 HAL_PIXEL_FORMAT_BLOB
2592 x 1944 HAL_PIXEL_FORMAT_YCbCr_420_888
2592 x 1944 HAL_PIXEL_FORMAT_BLOB
2048 x 1536 HAL_PIXEL_FORMAT_YCbCr_420_888
2048 x 1536 HAL_PIXEL_FORMAT_BLOB
1920 x 1440 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1440 HAL_PIXEL_FORMAT_BLOB
1928 x 1208 HAL_PIXEL_FORMAT_YCbCr_420_888
1928 x 1208 HAL_PIXEL_FORMAT_BLOB
1920 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1080 HAL_PIXEL_FORMAT_BLOB
1600 x 1200 HAL_PIXEL_FORMAT_YCbCr_420_888
1600 x 1200 HAL_PIXEL_FORMAT_BLOB
1440 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1440 x 1080 HAL_PIXEL_FORMAT_BLOB
1280 x 960 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 960 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1080 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1080 x 1080 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 1280 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 1280 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
4056 x 3040 HAL_PIXEL_FORMAT_RAW10
4056 x 3040 HAL_PIXEL_FORMAT_RAW12
4056 x 3040 HAL_PIXEL_FORMAT_RAW16
4056 x 3040 HAL_PIXEL_FORMAT_RAW_OPAQUE
3840 x 2160 HAL_PIXEL_FORMAT_RAW10
3840 x 2160 HAL_PIXEL_FORMAT_RAW12
3840 x 2160 HAL_PIXEL_FORMAT_RAW16
3840 x 2160 HAL_PIXEL_FORMAT_RAW_OPAQUE
1920 x 1080 HAL_PIXEL_FORMAT_RAW10
1920 x 1080 HAL_PIXEL_FORMAT_RAW12
1920 x 1080 HAL_PIXEL_FORMAT_RAW16
1920 x 1080 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 100
max = 35200ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
2200ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 243753000ns====================================
Stats for camera: 2ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
240 x 1629ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
240 x 1629 HAL_PIXEL_FORMAT_RAW10
240 x 1629 HAL_PIXEL_FORMAT_RAW12
240 x 1629 HAL_PIXEL_FORMAT_RAW16
240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 0ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
0ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 0ns====================================
Stats for camera: 3ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Number of cameras detected: 4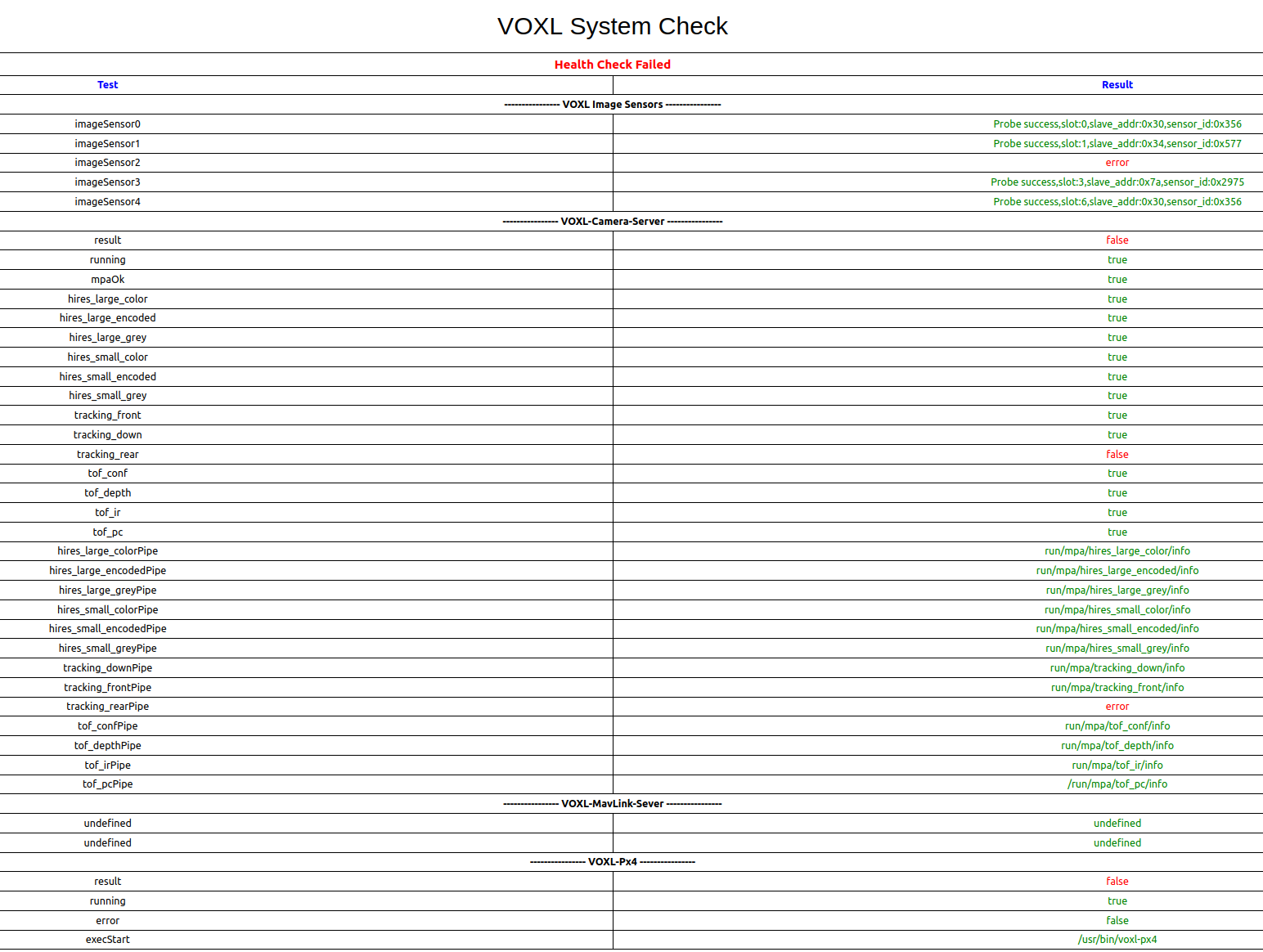
-
@Alex-Kushleyev here's the system response.
voxl2:/$ cd /home/root
voxl2:~$ dpkg -i libmodal-journal_0.2.6-202505081055_arm64.deb
(Reading database ... 137565 files and directories currently installed.)
Preparing to unpack libmodal-journal_0.2.6-202505081055_arm64.deb ...
Unpacking libmodal-journal (0.2.6-202505081055) over (0.2.5) ...
Setting up libmodal-journal (0.2.6-202505081055) ...
Processing triggers for libc-bin (2.27-3ubuntu1.6) ...
voxl2:~$ dpkg -l | grep libmodal-journal
ii libmodal-journal 0.2.6-202505081055 arm64 Journaling library
voxl2:~$ voxl-camera-server -l
existing instance of voxl-camera-server found, attempting to stop it
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 4DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Cam idx: 1, Cam slot: 1, Slave Address: 0x0034, Sensor Id: 0x0577
DEBUG: Cam idx: 2, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975
DEBUG: Cam idx: 3, Cam slot: 6, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Note: This list comes from the HAL module and may not be indicative
DEBUG: of configurations that have full pipelinesDEBUG: Number of cameras: 4
====================================
Stats for camera: 0ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Stats for camera: 1ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
4056 x 3040
3840 x 2160
1920 x 1080
1920 x 1080
1920 x 1080
1280 x 720
1280 x 720ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
4056 x 3040 HAL_PIXEL_FORMAT_YCbCr_420_888
4056 x 3040 HAL_PIXEL_FORMAT_BLOB
4000 x 3000 HAL_PIXEL_FORMAT_YCbCr_420_888
4000 x 3000 HAL_PIXEL_FORMAT_BLOB
3840 x 2160 HAL_PIXEL_FORMAT_YCbCr_420_888
3840 x 2160 HAL_PIXEL_FORMAT_BLOB
3264 x 2448 HAL_PIXEL_FORMAT_YCbCr_420_888
3264 x 2448 HAL_PIXEL_FORMAT_BLOB
3200 x 2400 HAL_PIXEL_FORMAT_YCbCr_420_888
3200 x 2400 HAL_PIXEL_FORMAT_BLOB
2976 x 2976 HAL_PIXEL_FORMAT_YCbCr_420_888
2976 x 2976 HAL_PIXEL_FORMAT_BLOB
2688 x 1512 HAL_PIXEL_FORMAT_YCbCr_420_888
2688 x 1512 HAL_PIXEL_FORMAT_BLOB
2592 x 1944 HAL_PIXEL_FORMAT_YCbCr_420_888
2592 x 1944 HAL_PIXEL_FORMAT_BLOB
2048 x 1536 HAL_PIXEL_FORMAT_YCbCr_420_888
2048 x 1536 HAL_PIXEL_FORMAT_BLOB
1920 x 1440 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1440 HAL_PIXEL_FORMAT_BLOB
1928 x 1208 HAL_PIXEL_FORMAT_YCbCr_420_888
1928 x 1208 HAL_PIXEL_FORMAT_BLOB
1920 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1080 HAL_PIXEL_FORMAT_BLOB
1600 x 1200 HAL_PIXEL_FORMAT_YCbCr_420_888
1600 x 1200 HAL_PIXEL_FORMAT_BLOB
1440 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1440 x 1080 HAL_PIXEL_FORMAT_BLOB
1280 x 960 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 960 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1080 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1080 x 1080 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 1280 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 1280 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
4056 x 3040 HAL_PIXEL_FORMAT_RAW10
4056 x 3040 HAL_PIXEL_FORMAT_RAW12
4056 x 3040 HAL_PIXEL_FORMAT_RAW16
4056 x 3040 HAL_PIXEL_FORMAT_RAW_OPAQUE
3840 x 2160 HAL_PIXEL_FORMAT_RAW10
3840 x 2160 HAL_PIXEL_FORMAT_RAW12
3840 x 2160 HAL_PIXEL_FORMAT_RAW16
3840 x 2160 HAL_PIXEL_FORMAT_RAW_OPAQUE
1920 x 1080 HAL_PIXEL_FORMAT_RAW10
1920 x 1080 HAL_PIXEL_FORMAT_RAW12
1920 x 1080 HAL_PIXEL_FORMAT_RAW16
1920 x 1080 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 100
max = 35200ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
2200ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 243753000ns====================================
Stats for camera: 2ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
240 x 1629ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
240 x 1629 HAL_PIXEL_FORMAT_RAW10
240 x 1629 HAL_PIXEL_FORMAT_RAW12
240 x 1629 HAL_PIXEL_FORMAT_RAW16
240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 0ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
0ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 0ns====================================
Stats for camera: 3ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Number of cameras detected: 4@Alex-Kushleyev would you be able to help troubleshoot this error with the rear tracking camera?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login