Starling 2 Max no GPS data
-
@ROBERT-JUDD , when you stop voxl camera server, all the cameras are powered off.
Systemctl stop voxl-camera-server
To disable individual cameras, you can modify /etc/modalai/voxl-camera-server.conf to set the “enabled” parameter to false for the desired camera(s) and restart camera server : systemctl restart voxl-camera-server
Alex
@Alex-Kushleyev 3DR says the replacement GPS won't be shipped until next week. Are there any useful tests I can run while waiting, eg. power down selective subsystems and observe GPS signal via u-center? I did hold the current (potentially defective) GPS module in my hand and move it around the drone while observing signal strength in u-center, but it wasn't clear to me where the interference was originating from. Open to suggestions. Thanks for your help.
-
@ROBERT-JUDD , yes it seems the signal drops by at least 10dB across all the satellites when the drone is switched on. This is quite significant (not good). You most likely would not be able to fly using GPS with these signal levels even though you have a lock (position and velocity estimates would be noisy).
Let me check with the team what the expected signal level is when a properly working Starling 2 Max is receiving GPS.
Alex
@Alex-Kushleyev said in Starling 2 Max no GPS data:
Let me check with the team what the expected signal level is when a properly working Starling 2 Max is receiving GPS.
Have you had a chance to check on this?
FYI in the meantime I've purchased 3 additional GPS modules from different manufacturers, and will evaluate them using u-center and the drone when they arrive.
I need to get this problem fixed somehow - can't fly far without a GPS!
-
@Alex-Kushleyev said in Starling 2 Max no GPS data:
Let me check with the team what the expected signal level is when a properly working Starling 2 Max is receiving GPS.
Have you had a chance to check on this?
FYI in the meantime I've purchased 3 additional GPS modules from different manufacturers, and will evaluate them using u-center and the drone when they arrive.
I need to get this problem fixed somehow - can't fly far without a GPS!
Hi @ROBERT-JUDD , my colleague is setting up the exact test with Starling 2 Max with the 5G modem to see if there is any possible interference. We will get back to you soon. Meanwhile, please let us know if swapping of the GPS module produces any positive results. Thank you!
Alex
-
Hi @ROBERT-JUDD , my colleague is setting up the exact test with Starling 2 Max with the 5G modem to see if there is any possible interference. We will get back to you soon. Meanwhile, please let us know if swapping of the GPS module produces any positive results. Thank you!
Alex
@Alex-Kushleyev will do, thanks!
-
Hi @ROBERT-JUDD , my colleague is setting up the exact test with Starling 2 Max with the 5G modem to see if there is any possible interference. We will get back to you soon. Meanwhile, please let us know if swapping of the GPS module produces any positive results. Thank you!
Alex
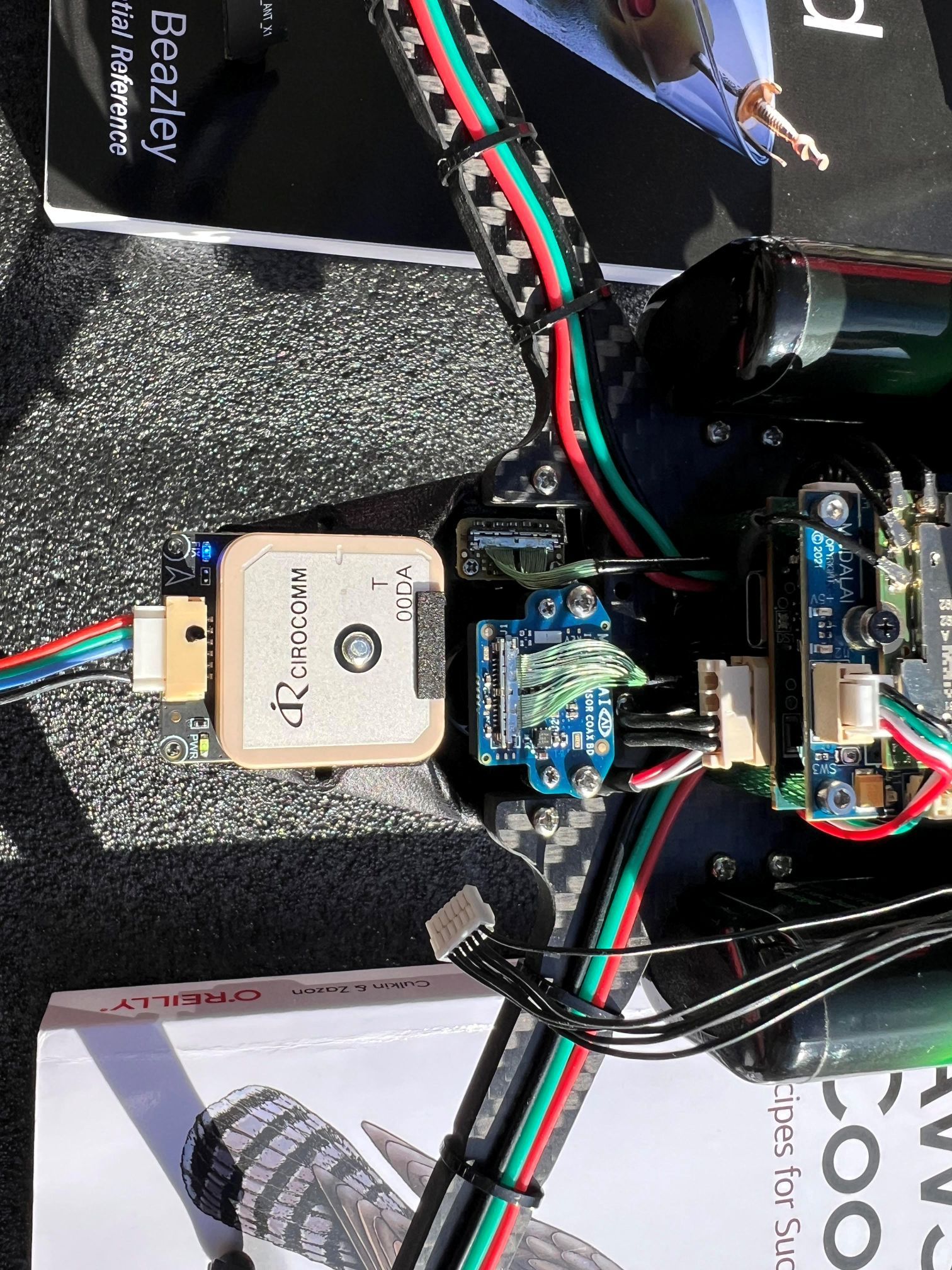
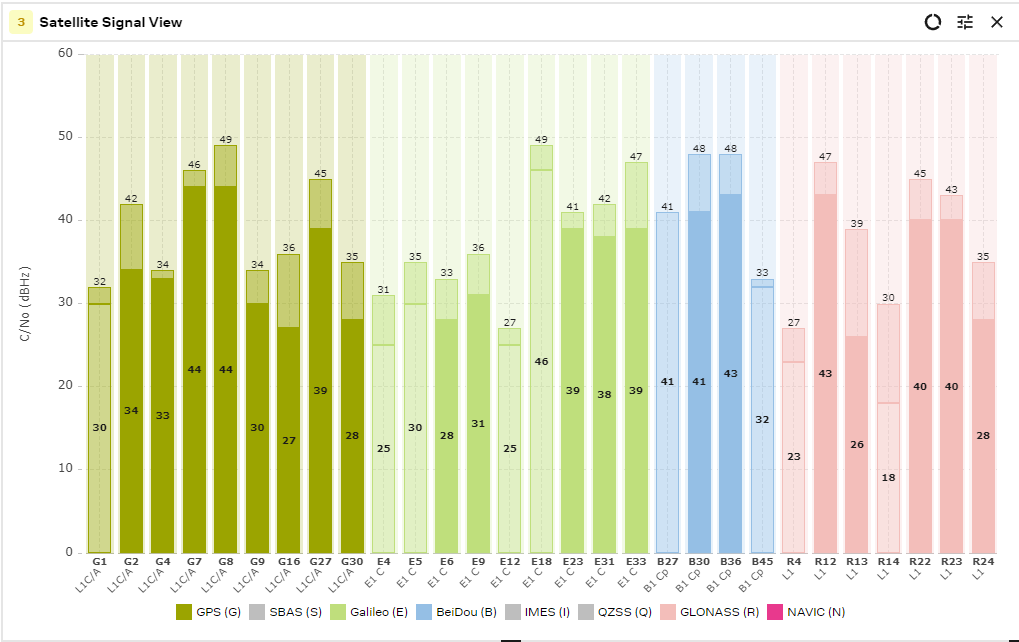
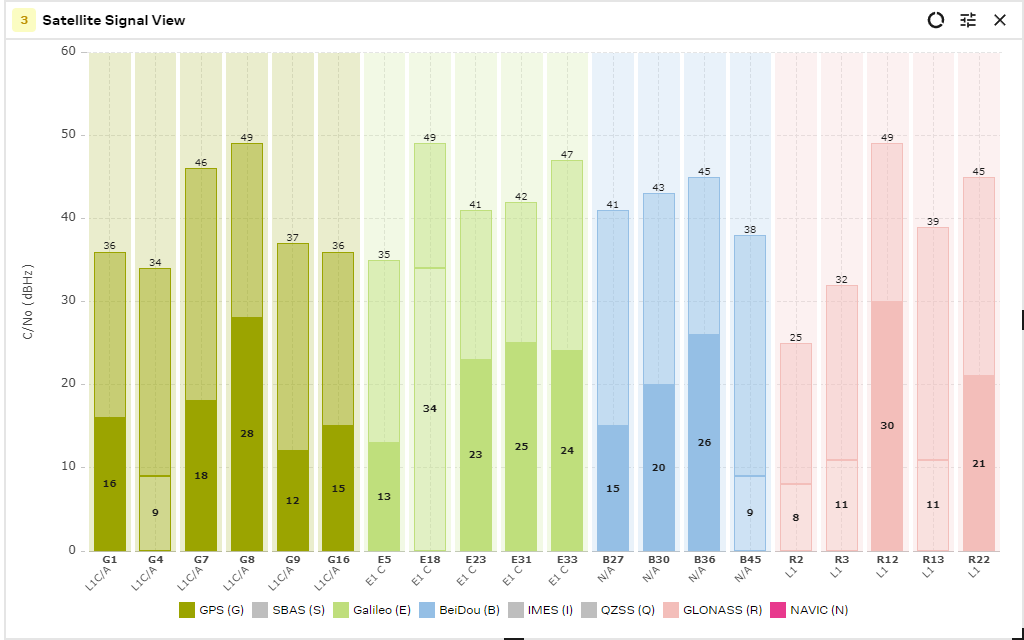
@Alex-Kushleyev Here are the results of testing with a brand new GPS from a different manufacturer (https://holybro.com/products/micro-m10-gps?variant=42981482954941). The GPS is in the same position as the original, but connected to u-center. As with prior tests, Lepton is disconnected and ALFA is removed.
Top u-center screen shot is with drone powered OFF, bottom is drone powered ON. To me this Holybro GPS looks about the same as the 3DR GPS, i.e. satellite signals drop significantly with drone powered ON. Not shown are results where I found that the satellite signal increased significantly when I moved the GPS module farther away and/or added shielding.
What do you suggest as next steps?
Thanks for your help.
-
@Alex-Kushleyev Here are the results of testing with a brand new GPS from a different manufacturer (https://holybro.com/products/micro-m10-gps?variant=42981482954941). The GPS is in the same position as the original, but connected to u-center. As with prior tests, Lepton is disconnected and ALFA is removed.
Top u-center screen shot is with drone powered OFF, bottom is drone powered ON. To me this Holybro GPS looks about the same as the 3DR GPS, i.e. satellite signals drop significantly with drone powered ON. Not shown are results where I found that the satellite signal increased significantly when I moved the GPS module farther away and/or added shielding.
What do you suggest as next steps?
Thanks for your help.
Hi @ROBERT-JUDD,
We are actively testing to find a solution (including myself, I just got my hands on a Starling 2 Max a few days ago and was able to confirm similar SNR to what you have experienced - my drone is without 5G modem). My colleague is testing one with a 5G modem. We acknowledge that there is an issue and we are working on a short-term workaround and a longer term solution.
We understand that this can be concerning and if you are not able to wait for a solution, please reach out to https://www.modalai.com/pages/rma and we can work on a return / refund.
If you are able to work with us on this issues, we are trying out different options including different gps units, disabling different components to find the source of the interference, and also re-locating the position of the gps unit to help reduce the effect of the noise. My gut feeling is that elevating the GPS receiver on a lightweight but rigid mast (4-6in) above the drone and include some shielding right below the receiver should significantly improve the performance (as a short-term workaround). I will test this ASAP and provide the results and pictures). Please give me a few more days.
Alex
-
Hi @ROBERT-JUDD,
We are actively testing to find a solution (including myself, I just got my hands on a Starling 2 Max a few days ago and was able to confirm similar SNR to what you have experienced - my drone is without 5G modem). My colleague is testing one with a 5G modem. We acknowledge that there is an issue and we are working on a short-term workaround and a longer term solution.
We understand that this can be concerning and if you are not able to wait for a solution, please reach out to https://www.modalai.com/pages/rma and we can work on a return / refund.
If you are able to work with us on this issues, we are trying out different options including different gps units, disabling different components to find the source of the interference, and also re-locating the position of the gps unit to help reduce the effect of the noise. My gut feeling is that elevating the GPS receiver on a lightweight but rigid mast (4-6in) above the drone and include some shielding right below the receiver should significantly improve the performance (as a short-term workaround). I will test this ASAP and provide the results and pictures). Please give me a few more days.
Alex
@Alex-Kushleyev Thanks for the reply, and yes, I'm happy to work with you to find a solution. As an attempt to improve SNR, I took the STEP files and created a "stretched" 3D-printed version of the GPS mount, see below, but I haven't had a chance to install it yet. Based on some previous testing I think the added distance will improve SNR somewhat, and adding some shielding should also help, but I think the best long term solution would be to find the source of EMI and target that. I don't have the equipment or knowledge to do that, however.
Please keep me posted, and let me know if there's any way I can contribute. Thanks for your help!

-
@Alex-Kushleyev Thanks for the reply, and yes, I'm happy to work with you to find a solution. As an attempt to improve SNR, I took the STEP files and created a "stretched" 3D-printed version of the GPS mount, see below, but I haven't had a chance to install it yet. Based on some previous testing I think the added distance will improve SNR somewhat, and adding some shielding should also help, but I think the best long term solution would be to find the source of EMI and target that. I don't have the equipment or knowledge to do that, however.
Please keep me posted, and let me know if there's any way I can contribute. Thanks for your help!
Sounds good. Please keep in mind that if you relocate the gps receiver, you should update the offsets for gps sensor position in px4 (prior to flight)
My test will be putting a 4-6in mast either where the gps receiver is now (in the back) or right in the middle, on top of the “roll cage”.
Alex
-
Sounds good. Please keep in mind that if you relocate the gps receiver, you should update the offsets for gps sensor position in px4 (prior to flight)
My test will be putting a 4-6in mast either where the gps receiver is now (in the back) or right in the middle, on top of the “roll cage”.
Alex
@Alex-Kushleyev Got it, thanks. FYI here's an interesting graph regarding the frequency of the EMI from a prior post:
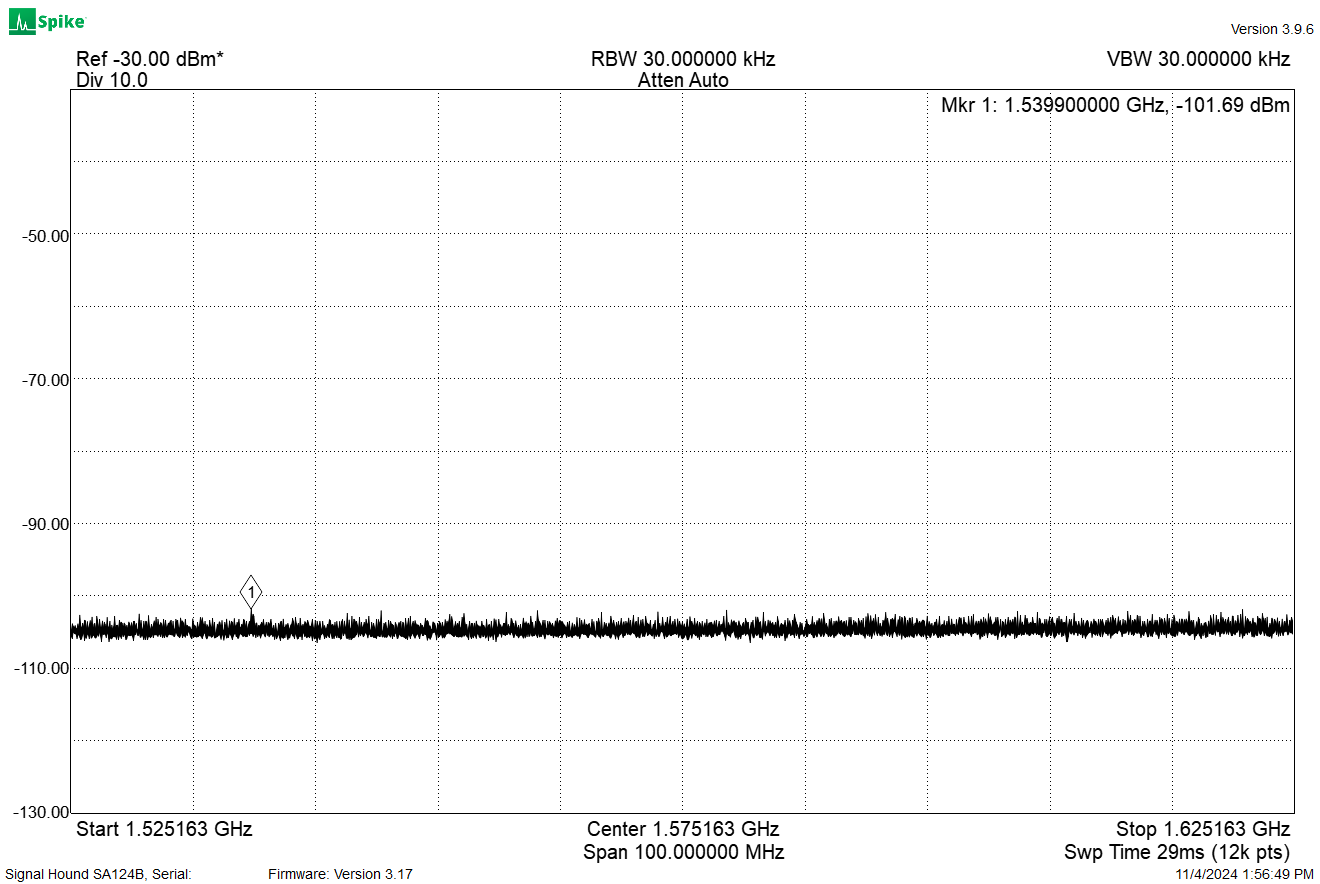
Problem acquiring GPS satellites (possible voxl2 board EMI?)
Hello, We have a Starling 2 and a few Starling 2 Max's which have issues acquiring GPS. We tested on several occasions outside with clear skies. However, we...
ModalAI Forum (forum.modalai.com)
-
Sounds good. Please keep in mind that if you relocate the gps receiver, you should update the offsets for gps sensor position in px4 (prior to flight)
My test will be putting a 4-6in mast either where the gps receiver is now (in the back) or right in the middle, on top of the “roll cage”.
Alex
@Alex-Kushleyev Have you made any progress with this yet? Please let me know if/how I can help.
-
@Alex-Kushleyev Have you made any progress with this yet? Please let me know if/how I can help.
@ROBERT-JUDD , thank you for your patience. A few updates.
Please note that this is an effort to come up with a short term workaround the issues with GNSS interference, so it may not be the most elegant solution.
- I have used a mast to offset the GNSS receiver upwards in order to get it further from the interference source(s). The mast is about 4.25 inches (11cm) tall. It is made up of a carbon fiber rod and two 3d printed parts.
- Images of the mast attached
- on top of the 3d printed plastic, there is a FR4 disk with a copper layer (on the bottom of the FR4 board, so it is not shown in the image)
- the 6-wire cable was extended to reach to the top of the mast (the extension is not very clean, i will make a better cable soon and test again).
- the mast was attached on top of the roll cage, but also tested with the mast sitting on top of the location in the back, where the GNSS receiver was originally located (while elevated from that location by the mast)
- in order to compare know what SNR to expect, i hooked up a Ublox EVK to my laptop so i can use Ucenter2 to plot the signal strengths while the EVK is placed about 2ft from the drone.
- we now have a simple python script that can grab the satellite info from px4 (satellite info needs to be enabled via px4 param, see script), so that the bar graph of voxl2 gps SNRs can be running live on a laptop that is also running ucenter.
Results
- using the mast with the FR4 (with copper) shield achieves SNRs that are very close to the SNRs from EVK
- Running Commando 8 transmitter in close proximity (less than 5ft, the closer the worse, especially TX antenna above the gps antenna) to the gps receiver can degrade SNR up to 10dB !! This can happen if you are standing right next to the drone before take off. It looks like the RC TX is saturating the GNSS receiver, even though the RC is in the 900mhz band.
- the shield on top of the mast (FR4+copper, but i also tried thin carbon fiber) helps increase SNR by around 3-6dB. Also, it may be good to add some copper tape (with non-conductive adhesive) to cover up the back of the GNSS receiver in order to prevent noise being injected into the short trace connecting the antenna and the GNSS receiver. I will try that, need to buy some copper tape. Using copper tape can reduce the mass of the top of the mast (the FR4 itself does nothing for shielding, since it's not conductive)
- I found better results when the 6-conductor cable is tightly wrapped around the mast as opposed to hanging loose , I may consider trying a shielded cable, perhaps there is some noise that can be picked up by the conductors as well (TBD)
- I would like to flight test this configuration (TBD, maybe Weds or Thurs). It is important to make sure the mast is stable and does not vibrate.
- the Lepton cable did not seem to matter, whether it was plugged in or not, i did not see any change when using the mast and unplugging the lepton cable in real-time.
- wifi dongle did not affect the gps signal, especially since it's normally mounted underneath the drone
Conclusion:
- based on these numbers from a non-moving test, the satellite signal strength looked very good (can't do much better than that) and I got a DGPS lock (i guess SBAS)
Other Thoughts
- using a GNSS receiver with a larger antenna, can help a bit more, but it will also increase the weight on top of the mast
You could try to replicate this type of testing and use a second (reference) gps receiver so you can compare the SNR to a (close to) ideal gps receiver without any interference. The reason for this is that the satellite SNR vary significantly as their position changes (over time), so a reference will allow you to always see what the SNR for each satellite (roughly) should be.
Images and plots:

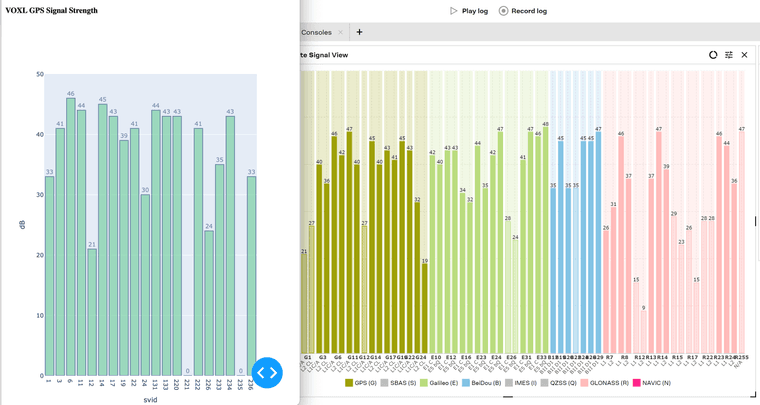
SNR plot. Left: Starling 2 Max (plot using attached script), Right: Ublox EVK (using Ucenter2)
Mast


GPS SNR Plot script (run on voxl and then open the browser using <voxl-ip>:8050 . Install the dependencies (see script) and run using
python3 gps_satellite_info.pyimport subprocess import time import numpy as np import argparse import ast import plotly.graph_objects as go from dash import Dash, dcc, html, Input, Output # pip3 install plotly typing-extensions dash --upgrade parser = argparse.ArgumentParser(description='GPS Test Script') args = parser.parse_args() # to enable publishing of satellite info, set px4 param (and restart px4): # param set GPS_SAT_INFO 1 #px4-listener satellite_info # #TOPIC: satellite_info # satellite_info # timestamp: 2611309684 (0.868903 seconds ago) # count: 13 # svid: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] # used: [1, 1, 1, 0, 1, 0, 1, 1, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0] # elevation: [11, 1, 30, 11, 47, 64, 68, 59, 13, 15, 27, 19, 33, 0, 0, 0, 0, 0, 0, 0] # azimuth: [74, 232, 213, 36, 37, 138, 241, 85, 209, 172, 165, 173, 158, 0, 0, 0, 0, 0, 0, 0] # snr: [0, 0, 26, 17, 32, 14, 29, 30, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] # prn: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] def get_px4_satellite_info(): cmd = 'px4-listener satellite_info' p = subprocess.Popen(cmd, shell=True, stdout=subprocess.PIPE, stderr=subprocess.STDOUT) timestamp = None count = 0 svid = None used = None elev = None azim = None snr = None prn = None for line in p.stdout.readlines(): l=str(line) #print(l) if 'timestamp' in l: ll = l.split(':')[1].split()[0] timestamp = float(ll) if 'count' in l: ll = l.split(':')[-1][:-3] count = int(ll) if 'svid' in l: ll = l.split(':')[-1][:-3] svid = np.array(ast.literal_eval(ll.strip())) if 'used' in l: ll = l.split(':')[-1][:-3] used = np.array(ast.literal_eval(ll.strip())) if 'snr' in l: ll = l.split(':')[-1][:-3] snr = np.array(ast.literal_eval(ll.strip())) if 'prn' in l: ll = l.split(':')[-1][:-3] prn = np.array(ast.literal_eval(ll.strip())) retval = p.wait() return (timestamp, count, svid, used, snr, prn) app = Dash(__name__) app.layout = html.Div([ html.H4('VOXL GPS Signal Strength '), html.Div(id='output'), dcc.Interval(id='interval-component', interval=1000, n_intervals=0), ]) @app.callback( Output("output", "children"), Input('interval-component', 'n_intervals')) def display_graph(render_option): (timestamp, count, svid, used, snr, prn) = get_px4_satellite_info() idx_valid = np.logical_and(svid != 0, svid != 255) svid_plot = svid[idx_valid] svids = [str(x) for x in svid_plot] snrs = snr[idx_valid] print('svid : ', svids) print('snr : ', snrs) fig = go.Figure() fig.add_trace(go.Bar(x=svids, y=snrs, text=snrs, textposition='outside')) fig.update_traces(marker_color='rgb(100,202,150)', marker_line_color='rgb(8,48,107)',marker_line_width=1.5, opacity=0.6) fig.update_layout( yaxis=dict(range=[0, 50], title=dict(text='dB') ) ) fig.update_layout( xaxis=dict(title=dict(text='svid') ) ) fig.update_layout(height=800) return dcc.Graph(figure=fig) app.run(debug=True, host='0.0.0.0') -
A Alex Kushleyev referenced this topic on
-
@ROBERT-JUDD , thank you for your patience. A few updates.
Please note that this is an effort to come up with a short term workaround the issues with GNSS interference, so it may not be the most elegant solution.
- I have used a mast to offset the GNSS receiver upwards in order to get it further from the interference source(s). The mast is about 4.25 inches (11cm) tall. It is made up of a carbon fiber rod and two 3d printed parts.
- Images of the mast attached
- on top of the 3d printed plastic, there is a FR4 disk with a copper layer (on the bottom of the FR4 board, so it is not shown in the image)
- the 6-wire cable was extended to reach to the top of the mast (the extension is not very clean, i will make a better cable soon and test again).
- the mast was attached on top of the roll cage, but also tested with the mast sitting on top of the location in the back, where the GNSS receiver was originally located (while elevated from that location by the mast)
- in order to compare know what SNR to expect, i hooked up a Ublox EVK to my laptop so i can use Ucenter2 to plot the signal strengths while the EVK is placed about 2ft from the drone.
- we now have a simple python script that can grab the satellite info from px4 (satellite info needs to be enabled via px4 param, see script), so that the bar graph of voxl2 gps SNRs can be running live on a laptop that is also running ucenter.
Results
- using the mast with the FR4 (with copper) shield achieves SNRs that are very close to the SNRs from EVK
- Running Commando 8 transmitter in close proximity (less than 5ft, the closer the worse, especially TX antenna above the gps antenna) to the gps receiver can degrade SNR up to 10dB !! This can happen if you are standing right next to the drone before take off. It looks like the RC TX is saturating the GNSS receiver, even though the RC is in the 900mhz band.
- the shield on top of the mast (FR4+copper, but i also tried thin carbon fiber) helps increase SNR by around 3-6dB. Also, it may be good to add some copper tape (with non-conductive adhesive) to cover up the back of the GNSS receiver in order to prevent noise being injected into the short trace connecting the antenna and the GNSS receiver. I will try that, need to buy some copper tape. Using copper tape can reduce the mass of the top of the mast (the FR4 itself does nothing for shielding, since it's not conductive)
- I found better results when the 6-conductor cable is tightly wrapped around the mast as opposed to hanging loose , I may consider trying a shielded cable, perhaps there is some noise that can be picked up by the conductors as well (TBD)
- I would like to flight test this configuration (TBD, maybe Weds or Thurs). It is important to make sure the mast is stable and does not vibrate.
- the Lepton cable did not seem to matter, whether it was plugged in or not, i did not see any change when using the mast and unplugging the lepton cable in real-time.
- wifi dongle did not affect the gps signal, especially since it's normally mounted underneath the drone
Conclusion:
- based on these numbers from a non-moving test, the satellite signal strength looked very good (can't do much better than that) and I got a DGPS lock (i guess SBAS)
Other Thoughts
- using a GNSS receiver with a larger antenna, can help a bit more, but it will also increase the weight on top of the mast
You could try to replicate this type of testing and use a second (reference) gps receiver so you can compare the SNR to a (close to) ideal gps receiver without any interference. The reason for this is that the satellite SNR vary significantly as their position changes (over time), so a reference will allow you to always see what the SNR for each satellite (roughly) should be.
Images and plots:
SNR plot. Left: Starling 2 Max (plot using attached script), Right: Ublox EVK (using Ucenter2)
Mast
GPS SNR Plot script (run on voxl and then open the browser using <voxl-ip>:8050 . Install the dependencies (see script) and run using
python3 gps_satellite_info.pyimport subprocess import time import numpy as np import argparse import ast import plotly.graph_objects as go from dash import Dash, dcc, html, Input, Output # pip3 install plotly typing-extensions dash --upgrade parser = argparse.ArgumentParser(description='GPS Test Script') args = parser.parse_args() # to enable publishing of satellite info, set px4 param (and restart px4): # param set GPS_SAT_INFO 1 #px4-listener satellite_info # #TOPIC: satellite_info # satellite_info # timestamp: 2611309684 (0.868903 seconds ago) # count: 13 # svid: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] # used: [1, 1, 1, 0, 1, 0, 1, 1, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0] # elevation: [11, 1, 30, 11, 47, 64, 68, 59, 13, 15, 27, 19, 33, 0, 0, 0, 0, 0, 0, 0] # azimuth: [74, 232, 213, 36, 37, 138, 241, 85, 209, 172, 165, 173, 158, 0, 0, 0, 0, 0, 0, 0] # snr: [0, 0, 26, 17, 32, 14, 29, 30, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] # prn: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] def get_px4_satellite_info(): cmd = 'px4-listener satellite_info' p = subprocess.Popen(cmd, shell=True, stdout=subprocess.PIPE, stderr=subprocess.STDOUT) timestamp = None count = 0 svid = None used = None elev = None azim = None snr = None prn = None for line in p.stdout.readlines(): l=str(line) #print(l) if 'timestamp' in l: ll = l.split(':')[1].split()[0] timestamp = float(ll) if 'count' in l: ll = l.split(':')[-1][:-3] count = int(ll) if 'svid' in l: ll = l.split(':')[-1][:-3] svid = np.array(ast.literal_eval(ll.strip())) if 'used' in l: ll = l.split(':')[-1][:-3] used = np.array(ast.literal_eval(ll.strip())) if 'snr' in l: ll = l.split(':')[-1][:-3] snr = np.array(ast.literal_eval(ll.strip())) if 'prn' in l: ll = l.split(':')[-1][:-3] prn = np.array(ast.literal_eval(ll.strip())) retval = p.wait() return (timestamp, count, svid, used, snr, prn) app = Dash(__name__) app.layout = html.Div([ html.H4('VOXL GPS Signal Strength '), html.Div(id='output'), dcc.Interval(id='interval-component', interval=1000, n_intervals=0), ]) @app.callback( Output("output", "children"), Input('interval-component', 'n_intervals')) def display_graph(render_option): (timestamp, count, svid, used, snr, prn) = get_px4_satellite_info() idx_valid = np.logical_and(svid != 0, svid != 255) svid_plot = svid[idx_valid] svids = [str(x) for x in svid_plot] snrs = snr[idx_valid] print('svid : ', svids) print('snr : ', snrs) fig = go.Figure() fig.add_trace(go.Bar(x=svids, y=snrs, text=snrs, textposition='outside')) fig.update_traces(marker_color='rgb(100,202,150)', marker_line_color='rgb(8,48,107)',marker_line_width=1.5, opacity=0.6) fig.update_layout( yaxis=dict(range=[0, 50], title=dict(text='dB') ) ) fig.update_layout( xaxis=dict(title=dict(text='svid') ) ) fig.update_layout(height=800) return dcc.Graph(figure=fig) app.run(debug=True, host='0.0.0.0')@Alex-Kushleyev Very interesting, thanks for the update.
Regarding the EMI from the Commando 8 transmitter, I wonder what would happen if you removed the Ghost Atto receiver and antenna from the drone. Maybe somehow they are involved in the EMI.
Noise from the 6-conductor cable is also interesting, I wonder if passing them through an RF shield would make a difference.
Please let me know the results of your test flight. If it's successful I may do something similar and repeat your testing.
What ideas do you and your team have for a long term solution? Do you have access to something like SignalHound equipment to search for the source of EMI?
Thanks
Bob -
@Alex-Kushleyev Very interesting, thanks for the update.
Regarding the EMI from the Commando 8 transmitter, I wonder what would happen if you removed the Ghost Atto receiver and antenna from the drone. Maybe somehow they are involved in the EMI.
Noise from the 6-conductor cable is also interesting, I wonder if passing them through an RF shield would make a difference.
Please let me know the results of your test flight. If it's successful I may do something similar and repeat your testing.
What ideas do you and your team have for a long term solution? Do you have access to something like SignalHound equipment to search for the source of EMI?
Thanks
Bob@ROBERT-JUDD , the behavior of the RC receiver on the drone as is as follows:
- when the Transmitter (Commando 8 ) is off, the receiver does not send (broadcast) anything
- when the Transmitter is on, the receiver sends back telemetry packets (even if there are no telemetry updates from the PX4 side).
However, the GPS signal degradation seems to be related with proximity of the RC TX when the TX is on. The RC RX antenna is already located at the bottom of the drone and it should be OK, but there could also be some sort of interference, so possibly moving the RC RX antenna to the landing gear could resolve that (if it's an issue, TBD).
I don't personally have a spektrum analyzer for EMI scanning, but our team does and this work is also happening in parallel.
Will keep you posted!
Alex
-
@ROBERT-JUDD , the behavior of the RC receiver on the drone as is as follows:
- when the Transmitter (Commando 8 ) is off, the receiver does not send (broadcast) anything
- when the Transmitter is on, the receiver sends back telemetry packets (even if there are no telemetry updates from the PX4 side).
However, the GPS signal degradation seems to be related with proximity of the RC TX when the TX is on. The RC RX antenna is already located at the bottom of the drone and it should be OK, but there could also be some sort of interference, so possibly moving the RC RX antenna to the landing gear could resolve that (if it's an issue, TBD).
I don't personally have a spektrum analyzer for EMI scanning, but our team does and this work is also happening in parallel.
Will keep you posted!
Alex
@Alex-Kushleyev Did you have a test flight yet? How did the GPS perform while flying?
Thanks
-
@Alex-Kushleyev Did you have a test flight yet? How did the GPS perform while flying?
Thanks
Hello @ROBERT-JUDD ,
Apologies for the delay. I have been out of office and did not quite perform the testing I wanted last week. I am returning to testing this on Monday, will provide an update then.
Alex
-
Hello @ROBERT-JUDD ,
Apologies for the delay. I have been out of office and did not quite perform the testing I wanted last week. I am returning to testing this on Monday, will provide an update then.
Alex
Hello @ROBERT-JUDD ,
I was finally able to do basic flight testing with the GPS mast. I was able to observe 23-26 satellites reported by PX4. In my initial test I was not logging the SNRs in px4 directly, but i will repeat the test again (with SNRs logged) and double check that SNRs were high throughout the flight. I did not see number of satellites drop between non-flying and flying modes.
I will continue testing more actively in the next few days. Meanwhile, If you want to get your Starling Max flying with better GPS, I would recommend that you try to replicate my results using the mods from images i posted above. The only changes i made from those images was just orient the slot in the FR4 board towards the front of the vehicle so that i could align the GPS module in the same orientation as the original one.
Please note that when you move the GPS unit (which also has the magnetometer), the mag needs to be re-calibrated. Additionally EKF2 GPS POS px4 param should be updated if the location of GPS module changes. It looks like these offsets are just defaults (0) on the Starling 2 Max, which may be OK, considering the offset is pretty small.
Please let me know if you need any additional details to help you get started with the mods.
Alex
-
Hello @ROBERT-JUDD ,
I was finally able to do basic flight testing with the GPS mast. I was able to observe 23-26 satellites reported by PX4. In my initial test I was not logging the SNRs in px4 directly, but i will repeat the test again (with SNRs logged) and double check that SNRs were high throughout the flight. I did not see number of satellites drop between non-flying and flying modes.
I will continue testing more actively in the next few days. Meanwhile, If you want to get your Starling Max flying with better GPS, I would recommend that you try to replicate my results using the mods from images i posted above. The only changes i made from those images was just orient the slot in the FR4 board towards the front of the vehicle so that i could align the GPS module in the same orientation as the original one.
Please note that when you move the GPS unit (which also has the magnetometer), the mag needs to be re-calibrated. Additionally EKF2 GPS POS px4 param should be updated if the location of GPS module changes. It looks like these offsets are just defaults (0) on the Starling 2 Max, which may be OK, considering the offset is pretty small.
Please let me know if you need any additional details to help you get started with the mods.
Alex
@Alex-Kushleyev Thanks for the update. I had to pivot away from this project and plan to revisit it when ModalAI has a long term fix. Have your colleagues made any progress identifying the source of the EMI?
Thanks again for your help.
-
S Sam Kiley referenced this topic on
-
R RyanH referenced this topic on
-
Hello @ROBERT-JUDD ,
I was finally able to do basic flight testing with the GPS mast. I was able to observe 23-26 satellites reported by PX4. In my initial test I was not logging the SNRs in px4 directly, but i will repeat the test again (with SNRs logged) and double check that SNRs were high throughout the flight. I did not see number of satellites drop between non-flying and flying modes.
I will continue testing more actively in the next few days. Meanwhile, If you want to get your Starling Max flying with better GPS, I would recommend that you try to replicate my results using the mods from images i posted above. The only changes i made from those images was just orient the slot in the FR4 board towards the front of the vehicle so that i could align the GPS module in the same orientation as the original one.
Please note that when you move the GPS unit (which also has the magnetometer), the mag needs to be re-calibrated. Additionally EKF2 GPS POS px4 param should be updated if the location of GPS module changes. It looks like these offsets are just defaults (0) on the Starling 2 Max, which may be OK, considering the offset is pretty small.
Please let me know if you need any additional details to help you get started with the mods.
Alex
@Alex-Kushleyev Circling back on this problem now, has your team identified the source of the EMI? Can I expect a long term fix that will allow me to fly my Starling 2 Max?
Thanks
-
@ROBERT-JUDD , thank you for your patience. A few updates.
Please note that this is an effort to come up with a short term workaround the issues with GNSS interference, so it may not be the most elegant solution.
- I have used a mast to offset the GNSS receiver upwards in order to get it further from the interference source(s). The mast is about 4.25 inches (11cm) tall. It is made up of a carbon fiber rod and two 3d printed parts.
- Images of the mast attached
- on top of the 3d printed plastic, there is a FR4 disk with a copper layer (on the bottom of the FR4 board, so it is not shown in the image)
- the 6-wire cable was extended to reach to the top of the mast (the extension is not very clean, i will make a better cable soon and test again).
- the mast was attached on top of the roll cage, but also tested with the mast sitting on top of the location in the back, where the GNSS receiver was originally located (while elevated from that location by the mast)
- in order to compare know what SNR to expect, i hooked up a Ublox EVK to my laptop so i can use Ucenter2 to plot the signal strengths while the EVK is placed about 2ft from the drone.
- we now have a simple python script that can grab the satellite info from px4 (satellite info needs to be enabled via px4 param, see script), so that the bar graph of voxl2 gps SNRs can be running live on a laptop that is also running ucenter.
Results
- using the mast with the FR4 (with copper) shield achieves SNRs that are very close to the SNRs from EVK
- Running Commando 8 transmitter in close proximity (less than 5ft, the closer the worse, especially TX antenna above the gps antenna) to the gps receiver can degrade SNR up to 10dB !! This can happen if you are standing right next to the drone before take off. It looks like the RC TX is saturating the GNSS receiver, even though the RC is in the 900mhz band.
- the shield on top of the mast (FR4+copper, but i also tried thin carbon fiber) helps increase SNR by around 3-6dB. Also, it may be good to add some copper tape (with non-conductive adhesive) to cover up the back of the GNSS receiver in order to prevent noise being injected into the short trace connecting the antenna and the GNSS receiver. I will try that, need to buy some copper tape. Using copper tape can reduce the mass of the top of the mast (the FR4 itself does nothing for shielding, since it's not conductive)
- I found better results when the 6-conductor cable is tightly wrapped around the mast as opposed to hanging loose , I may consider trying a shielded cable, perhaps there is some noise that can be picked up by the conductors as well (TBD)
- I would like to flight test this configuration (TBD, maybe Weds or Thurs). It is important to make sure the mast is stable and does not vibrate.
- the Lepton cable did not seem to matter, whether it was plugged in or not, i did not see any change when using the mast and unplugging the lepton cable in real-time.
- wifi dongle did not affect the gps signal, especially since it's normally mounted underneath the drone
Conclusion:
- based on these numbers from a non-moving test, the satellite signal strength looked very good (can't do much better than that) and I got a DGPS lock (i guess SBAS)
Other Thoughts
- using a GNSS receiver with a larger antenna, can help a bit more, but it will also increase the weight on top of the mast
You could try to replicate this type of testing and use a second (reference) gps receiver so you can compare the SNR to a (close to) ideal gps receiver without any interference. The reason for this is that the satellite SNR vary significantly as their position changes (over time), so a reference will allow you to always see what the SNR for each satellite (roughly) should be.
Images and plots:
SNR plot. Left: Starling 2 Max (plot using attached script), Right: Ublox EVK (using Ucenter2)
Mast
GPS SNR Plot script (run on voxl and then open the browser using <voxl-ip>:8050 . Install the dependencies (see script) and run using
python3 gps_satellite_info.pyimport subprocess import time import numpy as np import argparse import ast import plotly.graph_objects as go from dash import Dash, dcc, html, Input, Output # pip3 install plotly typing-extensions dash --upgrade parser = argparse.ArgumentParser(description='GPS Test Script') args = parser.parse_args() # to enable publishing of satellite info, set px4 param (and restart px4): # param set GPS_SAT_INFO 1 #px4-listener satellite_info # #TOPIC: satellite_info # satellite_info # timestamp: 2611309684 (0.868903 seconds ago) # count: 13 # svid: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] # used: [1, 1, 1, 0, 1, 0, 1, 1, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0] # elevation: [11, 1, 30, 11, 47, 64, 68, 59, 13, 15, 27, 19, 33, 0, 0, 0, 0, 0, 0, 0] # azimuth: [74, 232, 213, 36, 37, 138, 241, 85, 209, 172, 165, 173, 158, 0, 0, 0, 0, 0, 0, 0] # snr: [0, 0, 26, 17, 32, 14, 29, 30, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] # prn: [5, 8, 10, 13, 15, 18, 23, 24, 27, 32, 131, 133, 138, 0, 0, 0, 0, 0, 0, 0] def get_px4_satellite_info(): cmd = 'px4-listener satellite_info' p = subprocess.Popen(cmd, shell=True, stdout=subprocess.PIPE, stderr=subprocess.STDOUT) timestamp = None count = 0 svid = None used = None elev = None azim = None snr = None prn = None for line in p.stdout.readlines(): l=str(line) #print(l) if 'timestamp' in l: ll = l.split(':')[1].split()[0] timestamp = float(ll) if 'count' in l: ll = l.split(':')[-1][:-3] count = int(ll) if 'svid' in l: ll = l.split(':')[-1][:-3] svid = np.array(ast.literal_eval(ll.strip())) if 'used' in l: ll = l.split(':')[-1][:-3] used = np.array(ast.literal_eval(ll.strip())) if 'snr' in l: ll = l.split(':')[-1][:-3] snr = np.array(ast.literal_eval(ll.strip())) if 'prn' in l: ll = l.split(':')[-1][:-3] prn = np.array(ast.literal_eval(ll.strip())) retval = p.wait() return (timestamp, count, svid, used, snr, prn) app = Dash(__name__) app.layout = html.Div([ html.H4('VOXL GPS Signal Strength '), html.Div(id='output'), dcc.Interval(id='interval-component', interval=1000, n_intervals=0), ]) @app.callback( Output("output", "children"), Input('interval-component', 'n_intervals')) def display_graph(render_option): (timestamp, count, svid, used, snr, prn) = get_px4_satellite_info() idx_valid = np.logical_and(svid != 0, svid != 255) svid_plot = svid[idx_valid] svids = [str(x) for x in svid_plot] snrs = snr[idx_valid] print('svid : ', svids) print('snr : ', snrs) fig = go.Figure() fig.add_trace(go.Bar(x=svids, y=snrs, text=snrs, textposition='outside')) fig.update_traces(marker_color='rgb(100,202,150)', marker_line_color='rgb(8,48,107)',marker_line_width=1.5, opacity=0.6) fig.update_layout( yaxis=dict(range=[0, 50], title=dict(text='dB') ) ) fig.update_layout( xaxis=dict(title=dict(text='svid') ) ) fig.update_layout(height=800) return dcc.Graph(figure=fig) app.run(debug=True, host='0.0.0.0')Hey @Alex-Kushleyev,
I'm attempting this short term fix for a project I'm working on and I'd like to keep in line with recommended practices.
Can you kindly provide the .stl file used for the 3DP mount and also inform me of the material you used to 3DP?
Thanks in advance!
Christopher Joseph. -
Hey @Alex-Kushleyev,
I'm attempting this short term fix for a project I'm working on and I'd like to keep in line with recommended practices.
Can you kindly provide the .stl file used for the 3DP mount and also inform me of the material you used to 3DP?
Thanks in advance!
Christopher Joseph.@CJoseph said in Starling 2 Max no GPS data:
Hey @Alex-Kushleyev,
I'm attempting this short term fix for a project I'm working on and I'd like to keep in line with recommended practices.
Can you kindly provide the .stl file used for the 3DP mount and also inform me of the material you used to 3DP?
Thanks in advance!
Christopher Joseph.@Alex-Kushleyev: I'm also planning to repeat your modification, and the .stl file would be very helpful to me as well. I tried a different modification yesterday but it didn't work, so copying yours is my next step.
Thanks for your help.
Bob Judd -
S somalley referenced this topic on
-
 R ROBERT JUDD referenced this topic on
R ROBERT JUDD referenced this topic on
-
-
R roy.crosthwaite referenced this topic on

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login