Motor issues when running ESC calibration
-
@Alex-Kushleyev Good morning.
Yes, Actuator tab in Vehicle Setup in QGC has VOXL ESC selected, motor directions are correct, and motor slider controls the motors.
Ch 3 RC Throttle Tx input does not apply actual throttle inputs when UAV is armed in any flight mode.
RC calibration was successful and RC Ch3 reacts correctly when Spektrum Tx mode 2 throttle stick is manipulated.
I will get you a log this morning when I'm clear of my meetings.
As always, thank you,
RDJ@rdjarvis, yes lets get a log where you are in manual flight mode (thrust, roll, pitch, yaw control) and you arm the drone and just move the thrust stick up and down a few times trying to take off. As a separate test, at idle throttle try to move roll and pitch stick to see the response from those inputs.
It looks like a px4 configuration issue but i am not sure what exactly.
-
@rdjarvis, yes lets get a log where you are in manual flight mode (thrust, roll, pitch, yaw control) and you arm the drone and just move the thrust stick up and down a few times trying to take off. As a separate test, at idle throttle try to move roll and pitch stick to see the response from those inputs.
It looks like a px4 configuration issue but i am not sure what exactly.
-
@Alex-Kushleyev Awesome, will do.
Thank you,
RDJAlso please check the value you use for the following param THR_MDL_FAC. Just curious about the current value, it should be close to one (0.7-0.8) for rpm control, but i can help you compute it exact value.

Thrust Curve Compensation through THR_MDL_FAC
As suggested in the MC Tuning Guide, I try to compensate thrust nonlinearities through the THR_MDL_FAC parameter, which is described as follows: THR_MDL_FAC (FLOAT) Thrust to PWM model parameter Comment: Parameter us…

Dronecode Forum | Open Source Drone Development (discuss.px4.io)
-
Also please check the value you use for the following param THR_MDL_FAC. Just curious about the current value, it should be close to one (0.7-0.8) for rpm control, but i can help you compute it exact value.
Thrust Curve Compensation through THR_MDL_FAC
As suggested in the MC Tuning Guide, I try to compensate thrust nonlinearities through the THR_MDL_FAC parameter, which is described as follows: THR_MDL_FAC (FLOAT) Thrust to PWM model parameter Comment: Parameter us…
Dronecode Forum | Open Source Drone Development (discuss.px4.io)
-
@Alex-Kushleyev How do I upload a log? The forum say I do not have permission.
Upload it here and you can view results too. https://review.px4.io/ . The official flight review does not plot our custom esc data, but i will let you know how to view it later. I can download the log from the link above after you upload it and share a link
-
Upload it here and you can view results too. https://review.px4.io/ . The official flight review does not plot our custom esc data, but i will let you know how to view it later. I can download the log from the link above after you upload it and share a link
-
Upload it here and you can view results too. https://review.px4.io/ . The official flight review does not plot our custom esc data, but i will let you know how to view it later. I can download the log from the link above after you upload it and share a link
-
@rdjarvis said in Motor issues when running ESC calibration:
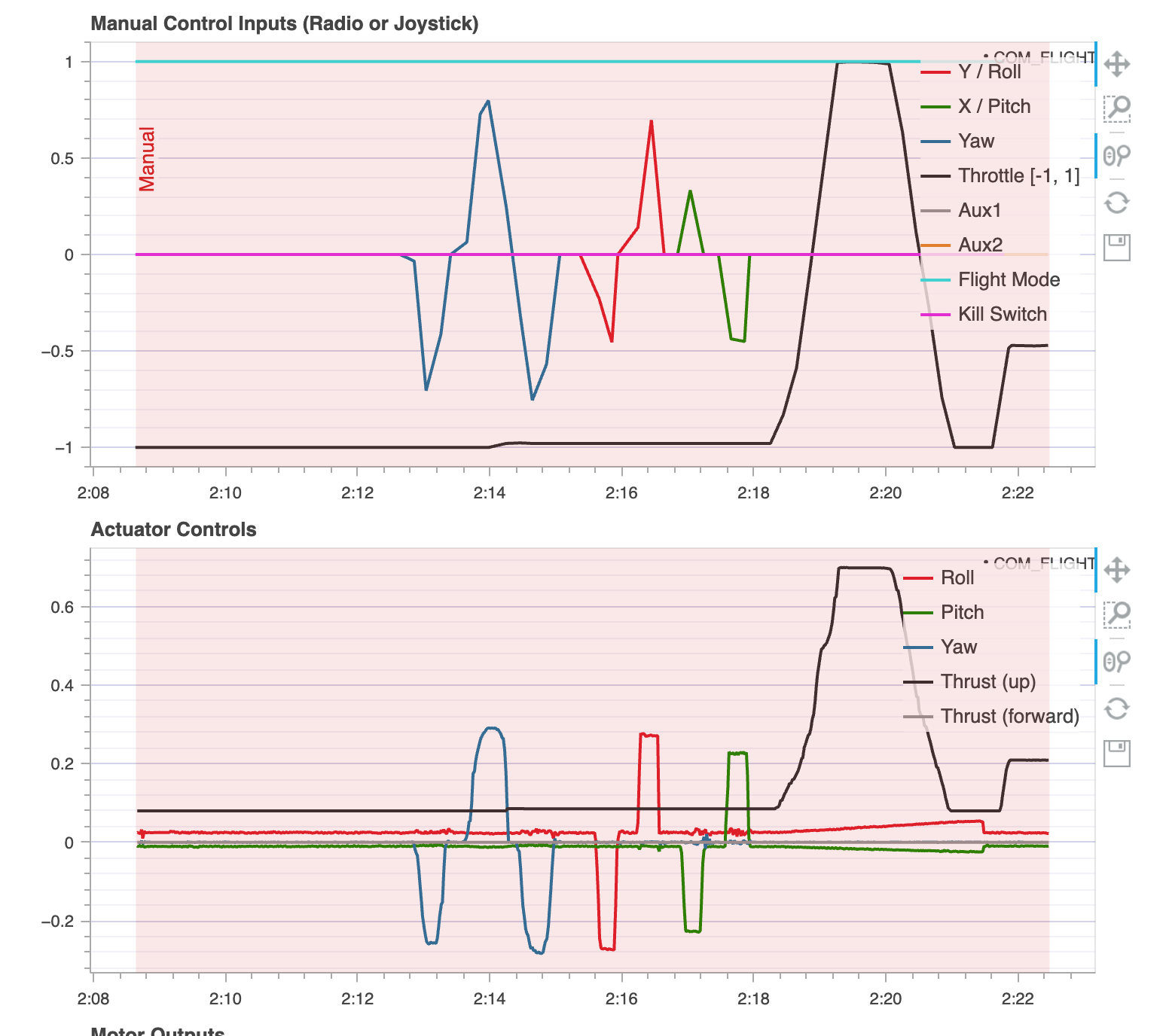
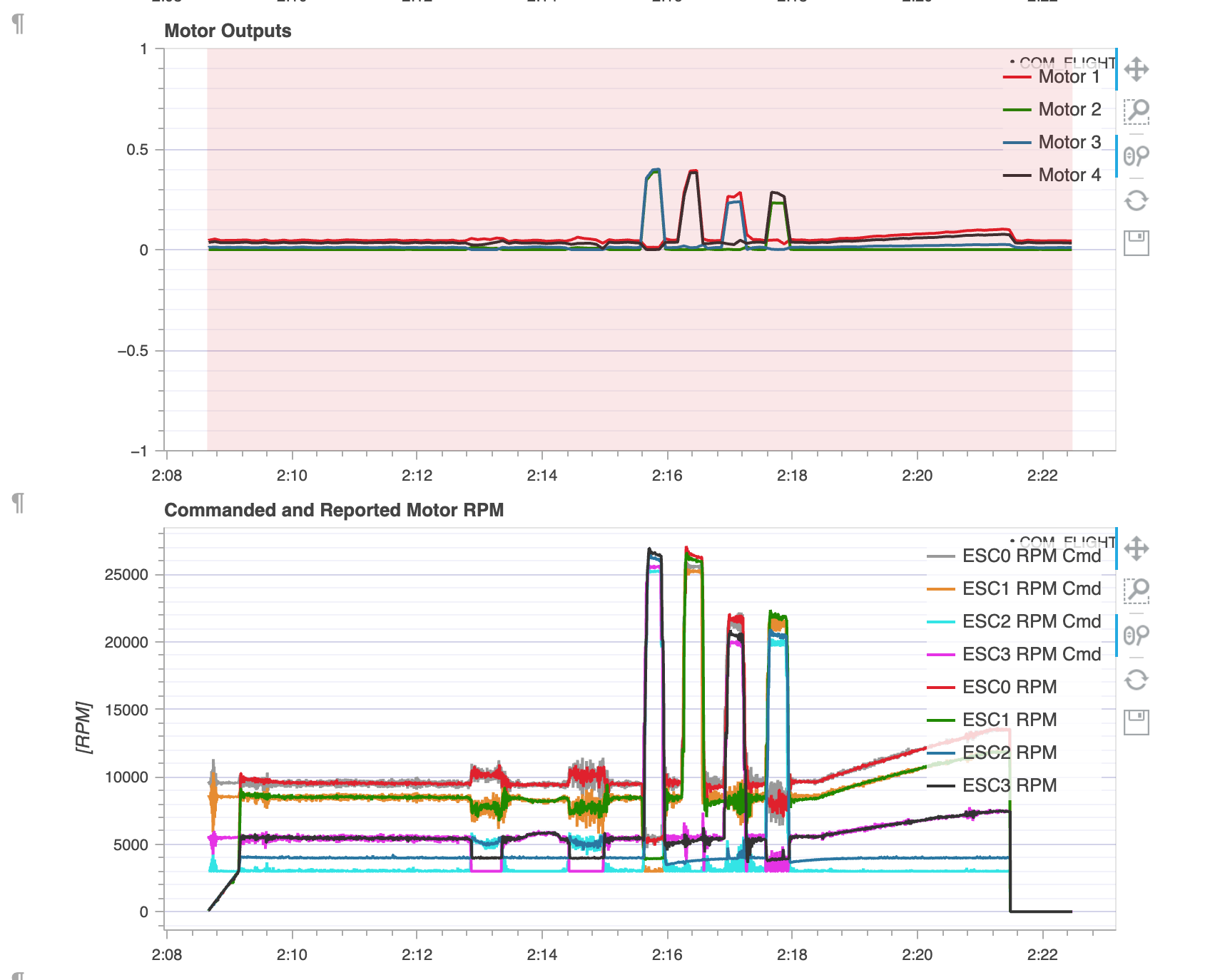
It seems you have something wrong with the thrust control (some filter?) the motors respond fine to roll / pitch but not thrust. see plots below showing RPMs. The ESC is tracking the desired RPMs well (actually a bit higher than desired at high rpm, but that is ok for now)
-
@rdjarvis said in Motor issues when running ESC calibration:
It seems you have something wrong with the thrust control (some filter?) the motors respond fine to roll / pitch but not thrust. see plots below showing RPMs. The ESC is tracking the desired RPMs well (actually a bit higher than desired at high rpm, but that is ok for now)
(look at how desired motor outputs and desired rpms rise very slowly when you increase the desired thrust, never reaching enough rpms to hover)
-
(look at how desired motor outputs and desired rpms rise very slowly when you increase the desired thrust, never reaching enough rpms to hover)
@Alex-Kushleyev Thank you. We understand that the desired inputs and actual input are not the same.
We have no filters. All ModalAI Hardware and Software are being used. ModalAI PX4 QGC Skin is used. Spektrum Rx/Tx DSMX as suggested by ModalAI is used.
We have purchased 2 ModalAI FPV 4n1 ESC and multiple VOXL and VOXL2 Dev kits to keep all hardware in the same ecosystem for easy integration and R&D for our product.
There is a disconnect between the FC/ESC comms on throttle Ch 3.
-
(look at how desired motor outputs and desired rpms rise very slowly when you increase the desired thrust, never reaching enough rpms to hover)
I do appreciate your willingness to help. I have selected ModalAI products for our organization based off of current and future capabilities. I have even selected a motor that I know you are using to ensure stable testing and flight characteristics.
If the ModalAI DEV team cannot troubleshoot issues on known UAV setups that you have at your shop, then I need to have a conversation with a different department.
All web advertising, Documentation, and Videos produced by ModalAI have shown these capabilities working flawlessly and it feels we have been oversold the true capabilities of the system today.
At this point these products cant even take flight.
-
(look at how desired motor outputs and desired rpms rise very slowly when you increase the desired thrust, never reaching enough rpms to hover)
-
I swapped the RC Channels for testing.
Throttle and yaw were swapped RC3 and RC4.
Same results with throttle not responding to inputs on RC4, instead of RC3.
-
I understand that getting a vehicle up in the air for the first time is a complicated process and it can be frustrating at times. At this point, it looks like all the hardware is working properly, so there must be some PX4 parameter that is causing this behavior. We have not seen such behavior before, where the thrust is increasing very slowly (ramp) when RC command is maxed. Can you please check SYS_VEHICLE_RESP parameter?
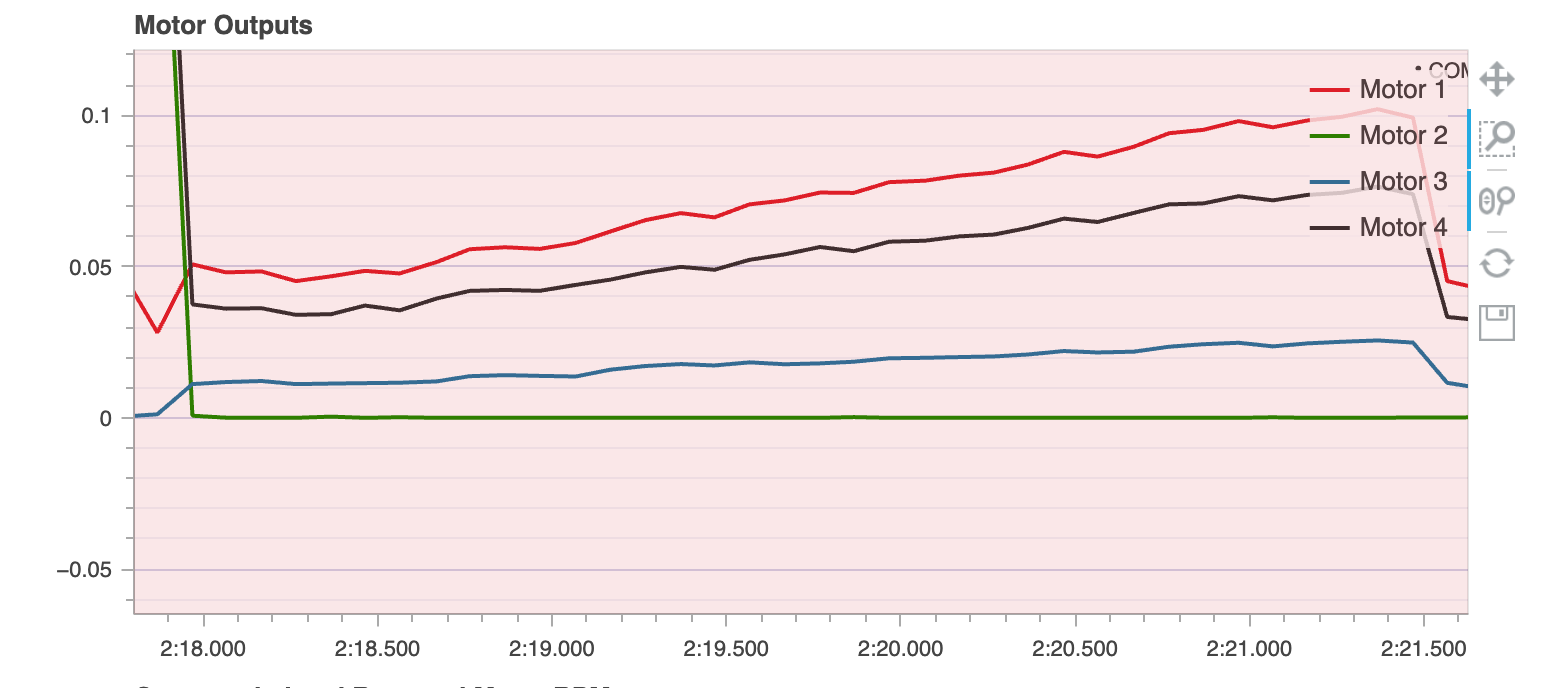
Motor Outputs plot shows a linear ramp (slew-rate limited) when you raised the throttle to the max. The PX4 software is doing that.
Also please consider the following points:
- PX4 is a 3rd party software with hundreds of parameters and it has its own support forum. You should ask PX4 specific questions there.
- you have built a completely custom vehicle and bringing it up from scratch, so it is very difficult for us to support. This is not a standard vehicle that use for testing.
- we have provided support to make sure your hardware is operating properly and it seems to me that it is. If you feel there is still a hardware issue (ESC, VOXL2 boards, etc) or ModalAI software (not 3rd party software), please let us know.
Finally, if the original FPV ESC is still not communicating and there is no physical damage to it, i recommend that you submit an RMA and get a replacement ESC https://www.modalai.com/pages/rma . If you are going to do that, please put a note "Attn Alex K" so that I get the ESC and investigate what happened.
Alex
-
I understand that getting a vehicle up in the air for the first time is a complicated process and it can be frustrating at times. At this point, it looks like all the hardware is working properly, so there must be some PX4 parameter that is causing this behavior. We have not seen such behavior before, where the thrust is increasing very slowly (ramp) when RC command is maxed. Can you please check SYS_VEHICLE_RESP parameter?
Motor Outputs plot shows a linear ramp (slew-rate limited) when you raised the throttle to the max. The PX4 software is doing that.
Also please consider the following points:
- PX4 is a 3rd party software with hundreds of parameters and it has its own support forum. You should ask PX4 specific questions there.
- you have built a completely custom vehicle and bringing it up from scratch, so it is very difficult for us to support. This is not a standard vehicle that use for testing.
- we have provided support to make sure your hardware is operating properly and it seems to me that it is. If you feel there is still a hardware issue (ESC, VOXL2 boards, etc) or ModalAI software (not 3rd party software), please let us know.
Finally, if the original FPV ESC is still not communicating and there is no physical damage to it, i recommend that you submit an RMA and get a replacement ESC https://www.modalai.com/pages/rma . If you are going to do that, please put a note "Attn Alex K" so that I get the ESC and investigate what happened.
Alex
-
I understand that getting a vehicle up in the air for the first time is a complicated process and it can be frustrating at times. At this point, it looks like all the hardware is working properly, so there must be some PX4 parameter that is causing this behavior. We have not seen such behavior before, where the thrust is increasing very slowly (ramp) when RC command is maxed. Can you please check SYS_VEHICLE_RESP parameter?
Motor Outputs plot shows a linear ramp (slew-rate limited) when you raised the throttle to the max. The PX4 software is doing that.
Also please consider the following points:
- PX4 is a 3rd party software with hundreds of parameters and it has its own support forum. You should ask PX4 specific questions there.
- you have built a completely custom vehicle and bringing it up from scratch, so it is very difficult for us to support. This is not a standard vehicle that use for testing.
- we have provided support to make sure your hardware is operating properly and it seems to me that it is. If you feel there is still a hardware issue (ESC, VOXL2 boards, etc) or ModalAI software (not 3rd party software), please let us know.
Finally, if the original FPV ESC is still not communicating and there is no physical damage to it, i recommend that you submit an RMA and get a replacement ESC https://www.modalai.com/pages/rma . If you are going to do that, please put a note "Attn Alex K" so that I get the ESC and investigate what happened.
Alex
@Alex-Kushleyev Good morning,
Started trouble shooting this issue again with no change.
Under 4s battery power, all motors respond well to motor test, using slider in QGC, min to full throttle in Actuator tab.
Still no response other than "slow ramp up" when throttle is increased on RC Tx.
RDJ
-
@Alex-Kushleyev Good morning,
Started trouble shooting this issue again with no change.
Under 4s battery power, all motors respond well to motor test, using slider in QGC, min to full throttle in Actuator tab.
Still no response other than "slow ramp up" when throttle is increased on RC Tx.
RDJ
@rdjarvis , i wonder if you should try to load params for one of modalai standard vehicles and change the min/max rpm to match your setup (4000min, 40000 max, or you can be a bit more conservative, say 30k max for this test). Then try with manual control but with propellers OFF. The issue you are seeing is coming from Flight Controller so it should not matter of props are on or off for this test. But you should keep them off if using params from a completely different vehicle / tune. But at least you could then see if FC lets you raise the thrust normally..
Basically, no change to esc, props off, choose our standard vehicle params for 4s and try to raise thrust, check the px4 log.
If you see strange behavior like strong oscillations, you should stop the test.
If the thrust control is ok, then you can compare your params more carefully with our standard params and see what causes this behavior.
-
@rdjarvis , i wonder if you should try to load params for one of modalai standard vehicles and change the min/max rpm to match your setup (4000min, 40000 max, or you can be a bit more conservative, say 30k max for this test). Then try with manual control but with propellers OFF. The issue you are seeing is coming from Flight Controller so it should not matter of props are on or off for this test. But you should keep them off if using params from a completely different vehicle / tune. But at least you could then see if FC lets you raise the thrust normally..
Basically, no change to esc, props off, choose our standard vehicle params for 4s and try to raise thrust, check the px4 log.
If you see strange behavior like strong oscillations, you should stop the test.
If the thrust control is ok, then you can compare your params more carefully with our standard params and see what causes this behavior.
-
@Alex-Kushleyev I am going to upload FPV_REVB. unless you recommend another.
RDJ
@rdjarvis , yes but change the vbatt since fpv revb is 6s. That is probably closest to your config
-
@rdjarvis , i wonder if you should try to load params for one of modalai standard vehicles and change the min/max rpm to match your setup (4000min, 40000 max, or you can be a bit more conservative, say 30k max for this test). Then try with manual control but with propellers OFF. The issue you are seeing is coming from Flight Controller so it should not matter of props are on or off for this test. But you should keep them off if using params from a completely different vehicle / tune. But at least you could then see if FC lets you raise the thrust normally..
Basically, no change to esc, props off, choose our standard vehicle params for 4s and try to raise thrust, check the px4 log.
If you see strange behavior like strong oscillations, you should stop the test.
If the thrust control is ok, then you can compare your params more carefully with our standard params and see what causes this behavior.

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login