VOXL 2 VOA not working
-
We are testing VOXL2 Collision avoidance with SDK 0.9.5.
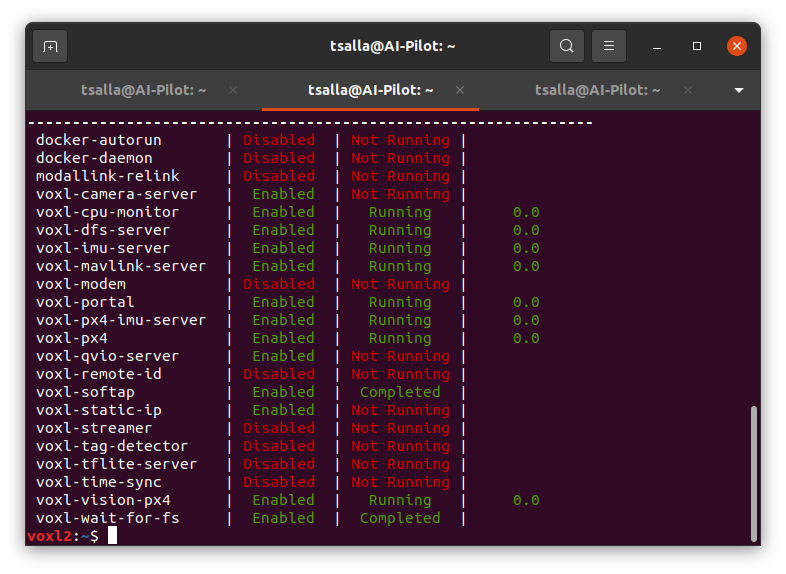
VOXL Vision PX4 is enabled and running and along with it are the below functionalities enabled,
- VIO is renabled and running
- Position hold is working and stable when testing the drone
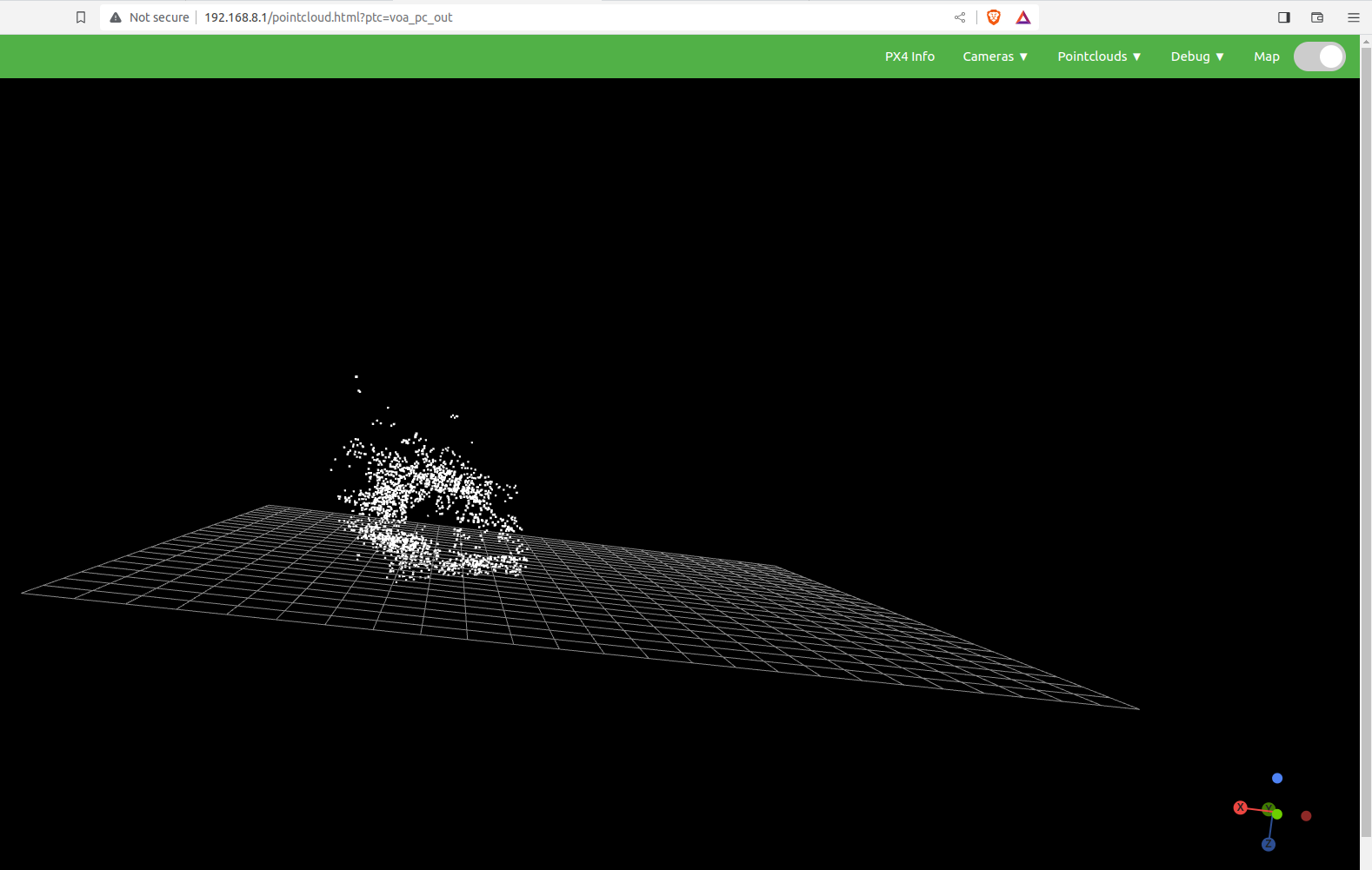
- DFS Server also enabled and running and voa_pc point cloud data can be visualised in VOXL Portal
-> en_voa is set to true in voxl-vision-px4 config.
Point cloud data is being published from voxl-dfs-server and can be seen in voxl-inspect-serices.
- We have accurately specified extrinsics relation for body to stereo in extrinsics.conf
- PX4 parmeters are set as per documentation,
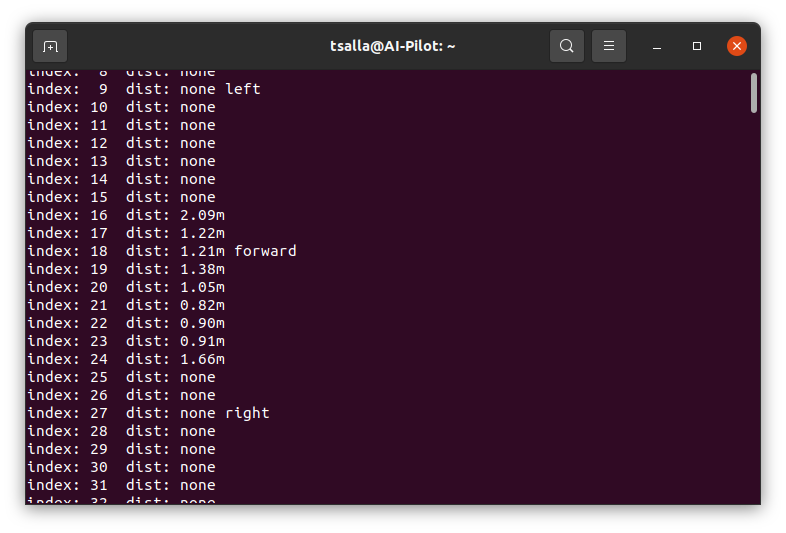
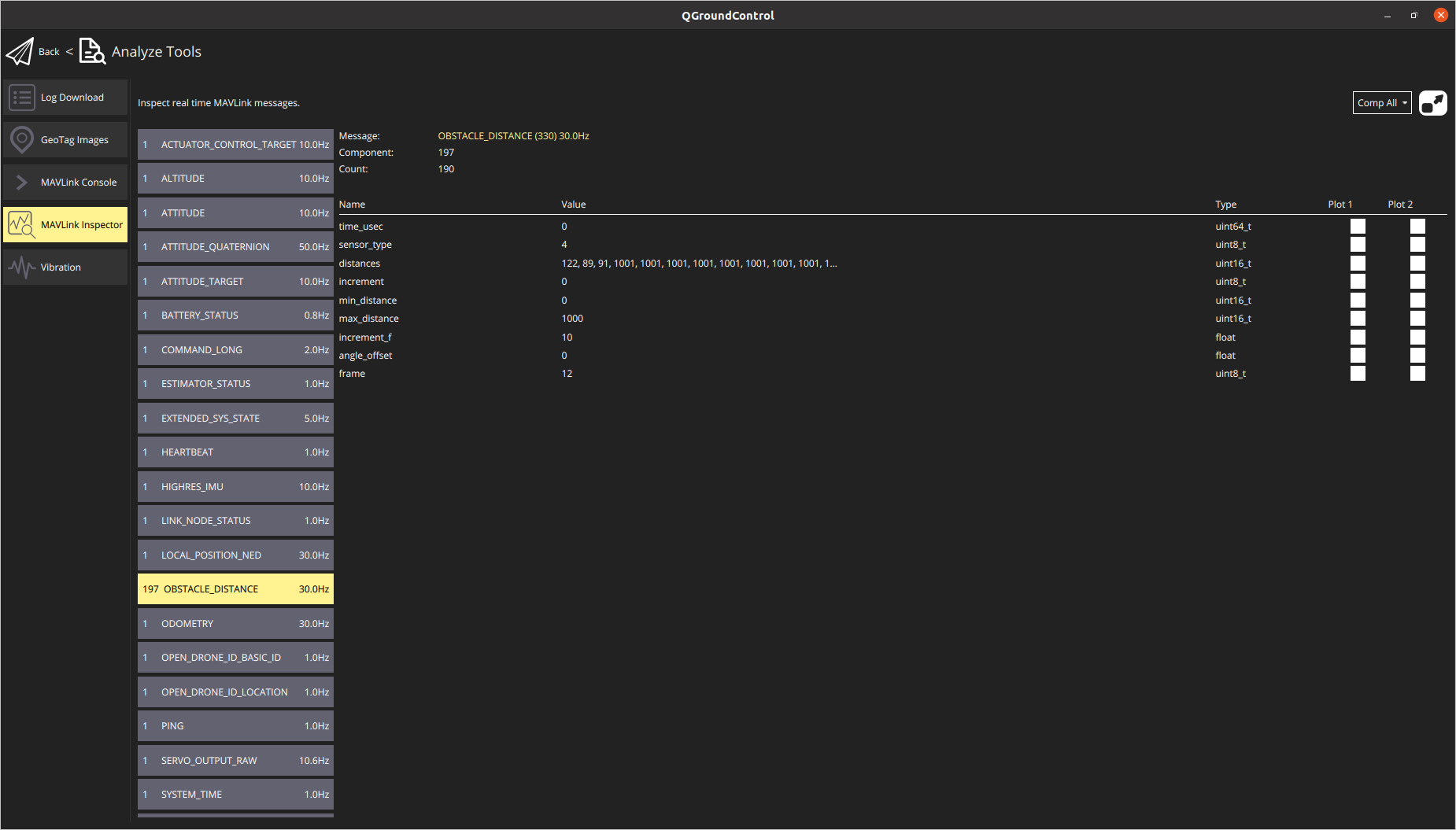
- Distances can be viewed in debug_stereo_linescan as well as in obstacle distances in QGC which are fairly accurate.
dfs_disparity scale and voa_pc are both present in the VOXL portal.
Stereo sensors are calibrated as reprojection errors are under 0.2 but collision prevention is not working during flight during Position hold mode/Altitude mode.
@Chad-Sweet @Alex-Gardner
-
Hi there, do you have COM_OBS_AVOID=1 (enabled)? You can set the parameter directly (params) or there's a menu option in QGC.
If so, can you arm the drone? With *_AVOID=1 I suspect all will work as you are seeing
obstacle_distancedata on mavlink.
If not, then you should get a QGC report "Avoidance system not ready"--let us know which case you end up with. -
Hi there, do you have COM_OBS_AVOID=1 (enabled)? You can set the parameter directly (params) or there's a menu option in QGC.
If so, can you arm the drone? With *_AVOID=1 I suspect all will work as you are seeing
obstacle_distancedata on mavlink.
If not, then you should get a QGC report "Avoidance system not ready"--let us know which case you end up with.@Cliff-Wong When I set COM_OBS_AVOID = 1 the system says it is not ready to fly, but I am not getting any messages as Avoidance System not ready
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login