Hi @xav04, GPS board on VOXL 1 can work with sparkfun GPS via the standard PX4 GPS driver.
I went to Holybro F9P instead of the sparkfun, and it works fine with VOXL 1. For VOXL 2, as Eric said, you may have access to a UART to see if it works.
Hi @xav04, GPS board on VOXL 1 can work with sparkfun GPS via the standard PX4 GPS driver.
I went to Holybro F9P instead of the sparkfun, and it works fine with VOXL 1. For VOXL 2, as Eric said, you may have access to a UART to see if it works.
Hi @Adrian-Hidalgo, I finally realized why the issue happened.
I put a wrong wire connection between the CW pair with the esc connectors under the wings.
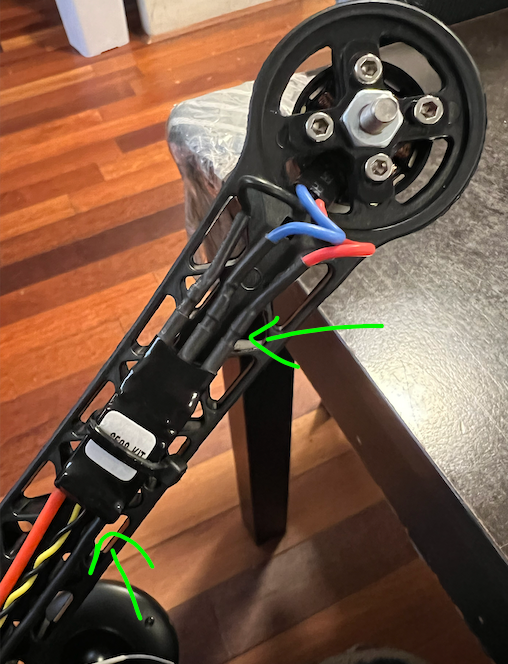
I used to connect the red wire to match the red connector of esc for all motors. That's why all motors spin in the same direction.
So, after checking one of old pictures I took for m500, I found both red and black wires should be reversely connected to the side of esc for the CW pair (3, 4). And the shaking issue is gone after this.
I didn't realize this detail before. All right, everything works well now. Thanks again for your help! 
@Adrian-Hidalgo Thanks!
After checking, I found that all 4 motors spin in the same direction as below shown:
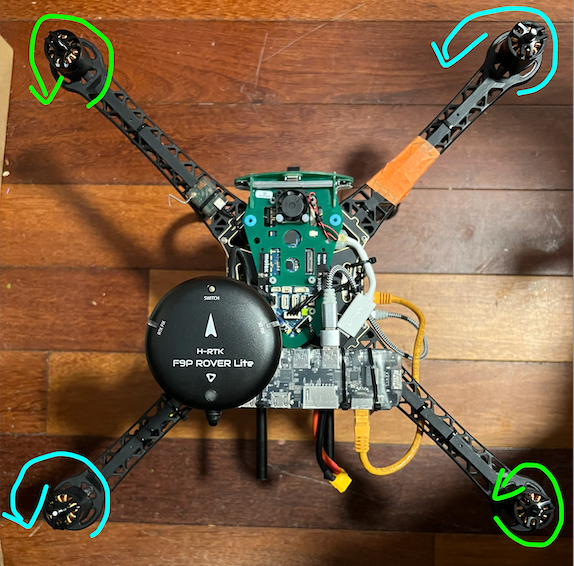
The issue is that the 3 and 4 motors spin in the wrong direction. And I double-checked the PWN breakout as below:
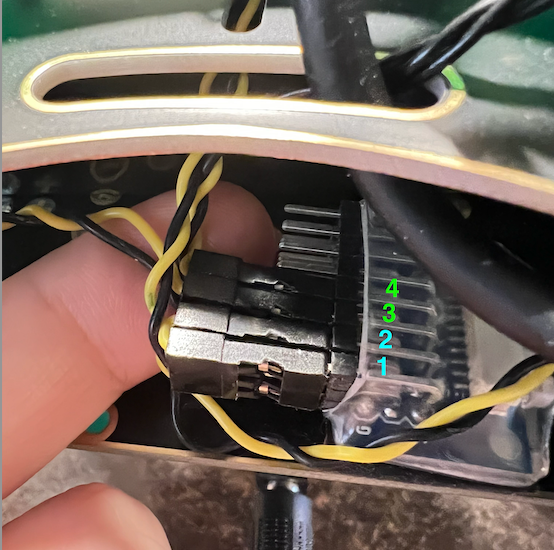
It seems I line up with the correct connection, right? E.g., from left to right, it shows 1, 2, 3, 4 connections with each motor. So, should the yellow wire be vertically above the black wire for each one? It should something wrong with the 3 and 4 connection, should I put it as 1, 2, 4,3?
Hi @Adrian-Hidalgo, could you please advise about this issue? Many thanks.
I tried to fly with indoor settings, but it seems m500 cannot take off even I used max thrust. Please double-check the below video:
https://youtube.com/shorts/-aKPTE524uI?feature=share
The story was that I got a crash last month. The frame broke and 2 of motors (CW pairs) were damaged. Please refer my previous post: https://forum.modalai.com/topic/1101/m500-motor-hot-and-vibration/7?_=1657365823867
The damaged motors lead to noisy sounds and jerking. So, I found the above 920kv version by Holybro. After the replacement, the jerking issue is almost gone, but it slightly remains when taking off and landing. The main issue is that m500 cannot take off, and it seems some calibration process is missing. Also, I found that m500 will shaking a bit with a higher thrust (low thrust is fine), please check this video:
https://youtube.com/shorts/6QrPMKwoohY
Please advise what I should do to fix it. Thanks.
Hi team,
Since my m500 motors got issues, I replaced all of them with the latest Holybro version https://shop.holybro.com/spare-parts-s500-v2-kit_p1251.html.
It seems Holybro update the motors with a higher 920kv value. I am wondering if I need to modify any configuration for the changes in VOXL or will they work fine by just plug-and-play?
Also, should I do any ESC calibration or PWM connector checking after replacement? Do you have any calibration tools for motor checking in VOXL or it could be done via QGC?
Thanks.
@Adrian-Hidalgo All right, thanks. I will check them step by step, and hope it will be solved soon ")
Hey @Adrian-Hidalgo, Thanks for the information.
I reopen the video and please feel free to double-check it.

I just did the arm that holds the motor (the 4 screws showing in the photo).
I tested to spin the motor by hand, but it seems there is no major resistance feeling or sounds.
I repaired 3 of motors, and both CW with black hats were not good (the video shows one of CWs), but one of CCWs was good as normal. Please any advice would be much appreciated.
I will try to detach one of CCWs, and attach to CW port to see if the CW motors break or the ESC connection gets issue.
Hey @Chad-Sweet, it's good to know the RMA process, but it may take a quite long time to complete because I am not in US.
I am trying to use the ESC calibration, but it seems I couldn't use QGC to do it. So, I will try the px4-esc-cal-tool in the link https://docs.modalai.com/flight-core-pwm-esc-calibration/ later.
Alternatively, it seems the VOXL flight dock has the ESCs support DShot, right? I checked the DSHOT_CONFIG is DShot600. Does it mean it will automatically run the ESC calibration after powering the drone?
Since I didn't touch the ESC wiring and only did screw stuff for the replacement, do you think incorrect screwing would lead to the issue? Or the CW pair motors might be damaged in the crash?
Actually, I did the same process for one of the CCW pairs, and it works.
Hi team,
After a crash, 3 wings were broken, but all the other parts were luckily good. I managed to repair using the spare parts of the s500.
However, I found that 2 of the motors on the repaired wings sounded quite noisy after repair. Testing for a while, the motors also became quite hot, leading to a slight vibration on the drone. Please double-check the below video:
https://youtube.com/shorts/pOtFSES7j8Q?feature=share
Actually, 4 motors still work as usual after the crash (no noisy sound). But, after the wing repair, 2 of them (CW pair with no silver dots) sound noisy.
I am not sure if this issue is caused by the wing replacement or the motor itself.
I may try the ESC calibration later https://docs.modalai.com/fc-configure-misc/#10-esc-calibration. But, I have no idea why it happened. Can you please advise about it? Many thanks.
@modaltb I see. It's good to know the story
If 22027 is the default one, it will be all right.
To be honest, I didn't touch the CBRK_IO_SAFETY before, and it's a bit weird why it was automatically modified for some reason.
Actually, I was trying to refresh a re-compiled 1.11.3-0.2.3 with my modification (increasing GPS log rate). So, I guess it might reset the value to 0 by PX4 default.
Anyways, thanks so much!
@Alex-Gardner From the PX4 link:
https://docs.px4.io/v1.12/en/advanced_config/prearm_arm_disarm.html
It claims the default safety check should be: COM_PREARM_MODE=1 (safety switch) and CBRK_IO_SAFETY=0 (I/O safety circuit breaker disabled). It says CBRK_IO_SAFETY=0 meaning IO safety disabled, but why the parameter profile page shows that CBRK_IO_SAFETY=22027 will disable IO safety? I am quite confused about it  .
.
https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html
@Alex-Gardner I thought the "SWITCH" button on the GPS module was the safety switch, but it didn't work after pressing it (no response for all time). So, what's the actual usage of this button?
After checking, I found people were trying to set the CBRK_IO_SAFETY to be 22027 to release the safety switch instead of pressing any buttons. It does work for me! But, I am confused what's the risk of setting this parameter?
Honestly, I never set it before, I am wondering why do I have to set it to release the safety switch this time? I am thinking about what parameters I changed to trigger the safety switch locked?
@Alex-Gardner Thanks for the reminder. I was confused about the kill switch this time, and I thought I should already open it .
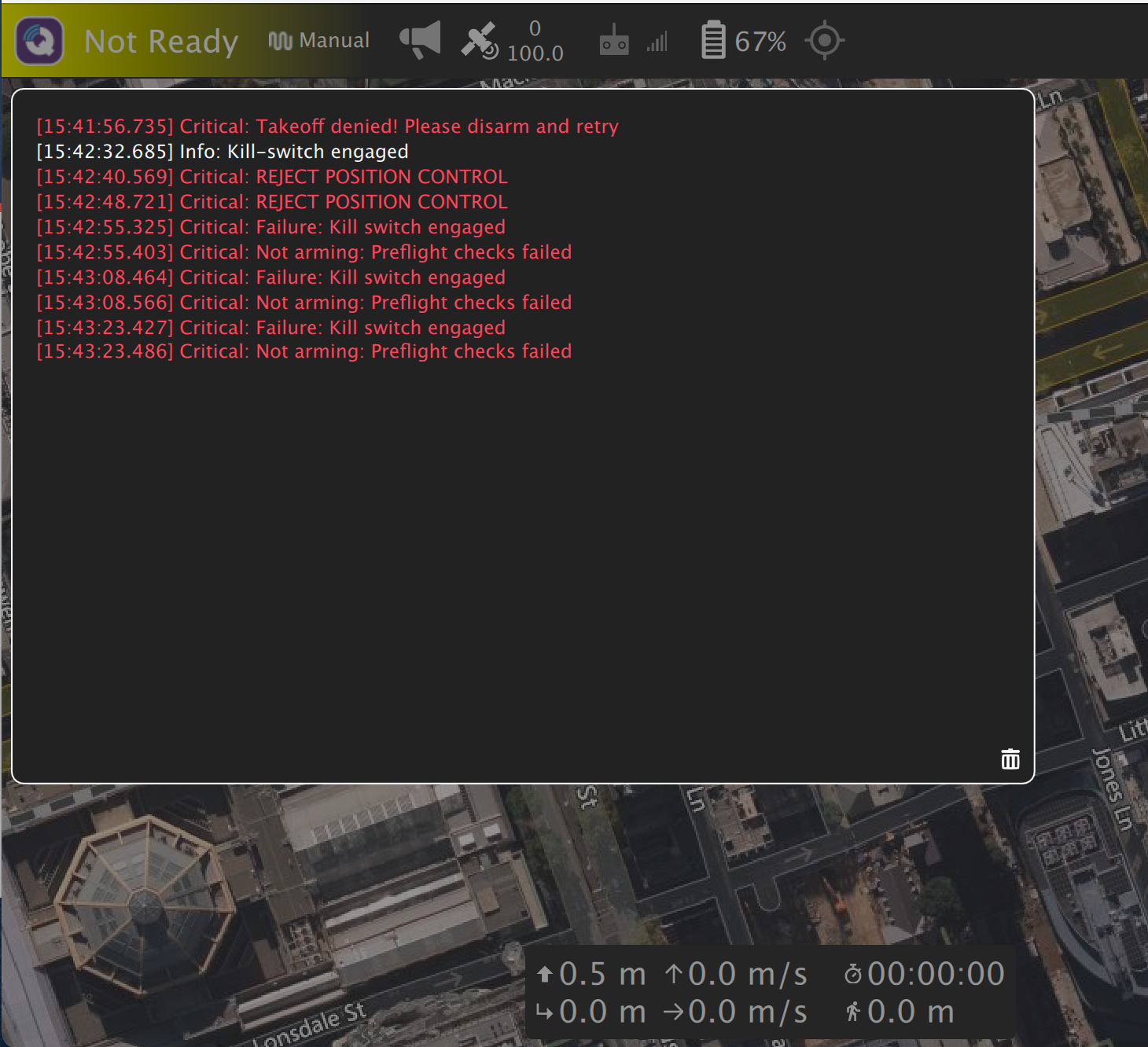
After checking, I will get "Arming denied press safety switch first" if I open it. Actually, I thought it was kill switch engaged. So, I am wondering where I should press the safety switch? I didn't get this notice before.
Hi team,
I got a weird issue. The drone was stuck at pre-arm check, and couldn’t be able to arm again. Before this, I have no issue with the pre-arm check. Actually, I tried to modify a couple of parameters that are related to flight speed and SDlog profile. Then, the pre-arm check seems to be failed.
I tried to reset the parameters to default, but the pre-arm check still failed. I uploaded 3 logs to the px4 view showing from boot to shutdown, but I couldn’t figure it out what happened. So, can you please help me to double-check if anything is wrong?
I am using 1.11.3-0.2.3 and QGC 4.1.4 on MacBook pro 2021.
@stevet I have a question about the recompile.
It seems directly using git submodule update will get the latest commits. I am thinking about how to reset all submodules back to the v1.11.3-0.2.3? Should I reset them one by one with the specific commit id or if there is an easier way to do so?
What if I may have to do it one by one, I am wondering where I could find out those commit ids?
@stevet Thanks so much for the quick check.
All right, I will have a try to figure it out then. Hope some simple changes could work for me