@tom ubuntu 22.04
yashas katte
@yashas katte
Posts
-
VOXL Sentinel Drone adb shell not working -
VOXL Sentinel Drone adb shell not working@tom
If you are telling me to turn off the drone and turn it on again, I did that and it did not work.
If that what power cycling the drone means. -
VOXL2 IMU server not workingHello,
I have VOXL 2(M0054) board, with VOXL suite version : 0.9.5.
My imu0 is not working, when i directly run the inu server with this commnadvoxl-imu-server voxl2:/$ voxl-imu-server loading calibration file ================================================================= calibration for IMU0: Gyro Offsets (rad/s): X: 0.000 Y: 0.000 Z: 0.000 Accl Offsets (m/s^2): X: 0.000 Y: 0.000 Z: 0.000 Accl Scale : X: 1.000 Y: 1.000 Z: 1.000 has_baseline_temp: 0 gyro_baseline_temp (C): 30.000 accl_baseline_temp (C): 30.000 has_temp_cal: 0 gyro_drift_coeff: X: 0.000000 0.000000 0.000000 gyro_drift_coeff: Y: 0.000000 0.000000 0.000000 gyro_drift_coeff: Z: 0.000000 0.000000 0.000000 accl_drift_coeff: X: 0.000000 0.000000 0.000000 accl_drift_coeff: Y: 0.000000 0.000000 0.000000 accl_drift_coeff: Z: 0.000000 0.000000 0.000000 calibration for IMU1: Gyro Offsets (rad/s): X: 0.000 Y: 0.000 Z: 0.000 Accl Offsets (m/s^2): X: 0.000 Y: 0.000 Z: 0.000 Accl Scale : X: 1.000 Y: 1.000 Z: 1.000 has_baseline_temp: 0 gyro_baseline_temp (C): 30.000 accl_baseline_temp (C): 30.000 has_temp_cal: 0 gyro_drift_coeff: X: 0.000000 0.000000 0.000000 gyro_drift_coeff: Y: 0.000000 0.000000 0.000000 gyro_drift_coeff: Z: 0.000000 0.000000 0.000000 accl_drift_coeff: X: 0.000000 0.000000 0.000000 accl_drift_coeff: Y: 0.000000 0.000000 0.000000 accl_drift_coeff: Z: 0.000000 0.000000 0.000000 calibration for IMU2: Gyro Offsets (rad/s): X: 0.000 Y: 0.000 Z: 0.000 Accl Offsets (m/s^2): X: 0.000 Y: 0.000 Z: 0.000 Accl Scale : X: 1.000 Y: 1.000 Z: 1.000 has_baseline_temp: 0 gyro_baseline_temp (C): 30.000 accl_baseline_temp (C): 30.000 has_temp_cal: 0 gyro_drift_coeff: X: 0.000000 0.000000 0.000000 gyro_drift_coeff: Y: 0.000000 0.000000 0.000000 gyro_drift_coeff: Z: 0.000000 0.000000 0.000000 accl_drift_coeff: X: 0.000000 0.000000 0.000000 accl_drift_coeff: Y: 0.000000 0.000000 0.000000 accl_drift_coeff: Z: 0.000000 0.000000 0.000000 calibration for IMU3: Gyro Offsets (rad/s): X: 0.000 Y: 0.000 Z: 0.000 Accl Offsets (m/s^2): X: 0.000 Y: 0.000 Z: 0.000 Accl Scale : X: 1.000 Y: 1.000 Z: 1.000 has_baseline_temp: 0 gyro_baseline_temp (C): 30.000 accl_baseline_temp (C): 30.000 has_temp_cal: 0 gyro_drift_coeff: X: 0.000000 0.000000 0.000000 gyro_drift_coeff: Y: 0.000000 0.000000 0.000000 gyro_drift_coeff: Z: 0.000000 0.000000 0.000000 accl_drift_coeff: X: 0.000000 0.000000 0.000000 accl_drift_coeff: Y: 0.000000 0.000000 0.000000 accl_drift_coeff: Z: 0.000000 0.000000 0.000000 ================================================================= loading config file ================================================================= imu_apps_enable: 1 imu_apps_bus: 3 imu_apps_sample_rate_hz: 1000.0 imu_apps_lp_cutoff_freq_hz: 92.0 imu_apps_rotate_common_frame: 1 imu_apps_fifo_poll_rate_hz: 100.0 aux_imu1_enable: 0 aux_imu1_bus: 1 aux_imu1_sample_rate_hz: 1000.0 aux_imu1_lp_cutoff_freq_hz: 92.0 aux_imu1_fifo_poll_rate_hz: 100.0 aux_imu2_enable: 0 aux_imu2_spi_bus: 14 aux_imu2_sample_rate_hz: 1000.0 aux_imu2_lp_cutoff_freq_hz: 92.0 aux_imu2_fifo_poll_rate_hz: 100.0 aux_imu3_enable: 0 aux_imu3_spi_bus: 5 aux_imu3_sample_rate_hz: 1000.0 aux_imu3_lp_cutoff_freq_hz: 92.0 aux_imu3_fifo_poll_rate_hz: 100.0 ================================================================= detected ICM42688 on spi bus[id] 3 Detected board M0054 Initializing IMU0 using ODR=1000.00hz which is the nearest the icm42688 can get to 1000.0 ERROR: in icm42688_basic_read read all 0's ERROR: failed to read data from IMU0 ERROR: failed to init at least one IMUI have tried flashing previous versions of voxl suite but its same result.
It was working perfectly before, but suddenly it stopped working.
So flashed suite again.Please help
-
VOXL Sentinel Drone adb shell not working@tom
Hello, I tired un-bricking VOXL2, but it failed. I followed the steps mentioned in the document.
while executingsudo qdl --debug --storage ufs --include . prog_firehose_ddr.elf rawprogram_unsparse0.xml rawprogram1.xml rawprogram2.xml rawprogram3.xml rawprogram4.xml rawprogram5.xml patch0.xml patch1.xml patch2.xml patch3.xml patch4.xml patch5.xmlI get error output log
sudo qdl --debug --storage ufs --include . prog_firehose_ddr.elf rawprogram_unsparse0.xml rawprogram1.xml rawprogram2.xml rawprogram3.xml rawprogram4.xml rawprogram5.xml patch0.xml patch1.xml patch2.xml patch3.xml patch4.xml patch5.xml HELLO version: 0x2 compatible: 0x1 max_len: 1024 mode: 0 READ64 image: 13 offset: 0x0 length: 0x40 READ64 image: 13 offset: 0x40 length: 0x310 READ64 image: 13 offset: 0x1000 length: 0x1000 READ64 image: 13 offset: 0x2000 length: 0xc48 READ64 image: 13 offset: 0x3000 length: 0x1000 READ64 image: 13 offset: 0x4000 length: 0x1000 READ64 image: 13 offset: 0x5000 length: 0x1000 READ64 image: 13 offset: 0x6000 length: 0x1000 READ64 image: 13 offset: 0x7000 length: 0x1000 READ64 image: 13 offset: 0x8000 length: 0x1000 READ64 image: 13 offset: 0x9000 length: 0x1000 READ64 image: 13 offset: 0xa000 length: 0x1000 READ64 image: 13 offset: 0xb000 length: 0x1000 READ64 image: 13 offset: 0xc000 length: 0x1000 READ64 image: 13 offset: 0xd000 length: 0x1000 READ64 image: 13 offset: 0xe000 length: 0x1000 READ64 image: 13 offset: 0xf000 length: 0x1000 READ64 image: 13 offset: 0x10000 length: 0x1000 READ64 image: 13 offset: 0x11000 length: 0x1000 READ64 image: 13 offset: 0x12000 length: 0x1000 READ64 image: 13 offset: 0x13000 length: 0x1000 READ64 image: 13 offset: 0x14000 length: 0x1000 READ64 image: 13 offset: 0x15000 length: 0x1000 READ64 image: 13 offset: 0x16000 length: 0x1000 READ64 image: 13 offset: 0x17000 length: 0x1000 READ64 image: 13 offset: 0x18000 length: 0x1000 READ64 image: 13 offset: 0x19000 length: 0x1000 READ64 image: 13 offset: 0x1a000 length: 0x1000 READ64 image: 13 offset: 0x1b000 length: 0x1000 READ64 image: 13 offset: 0x1c000 length: 0x1000 READ64 image: 13 offset: 0x1d000 length: 0x1000 READ64 image: 13 offset: 0x1e000 length: 0x1000 READ64 image: 13 offset: 0x1f000 length: 0x1000 READ64 image: 13 offset: 0x20000 length: 0x1000 READ64 image: 13 offset: 0x21000 length: 0x1000 READ64 image: 13 offset: 0x22000 length: 0x1000 READ64 image: 13 offset: 0x23000 length: 0x1000 READ64 image: 13 offset: 0x24000 length: 0x1000 READ64 image: 13 offset: 0x25000 length: 0x1000 READ64 image: 13 offset: 0x26000 length: 0x1000 READ64 image: 13 offset: 0x27000 length: 0x1000 READ64 image: 13 offset: 0x28000 length: 0x1000 READ64 image: 13 offset: 0x29000 length: 0x1000 READ64 image: 13 offset: 0x2a000 length: 0x1000 READ64 image: 13 offset: 0x2b000 length: 0x1000 READ64 image: 13 offset: 0x2c000 length: 0x1000 READ64 image: 13 offset: 0x2d000 length: 0x1000 READ64 image: 13 offset: 0x2e000 length: 0x1000 READ64 image: 13 offset: 0x2f000 length: 0x1000 READ64 image: 13 offset: 0x30000 length: 0x1000 READ64 image: 13 offset: 0x31000 length: 0x1000 READ64 image: 13 offset: 0x32000 length: 0x1000 READ64 image: 13 offset: 0x33000 length: 0x1000 READ64 image: 13 offset: 0x34000 length: 0x1000 READ64 image: 13 offset: 0x35000 length: 0x1000 READ64 image: 13 offset: 0x36000 length: 0x1000 READ64 image: 13 offset: 0x37000 length: 0x1000 READ64 image: 13 offset: 0x38000 length: 0x1000 READ64 image: 13 offset: 0x39000 length: 0x1000 READ64 image: 13 offset: 0x3a000 length: 0x1000 READ64 image: 13 offset: 0x3b000 length: 0x1000 READ64 image: 13 offset: 0x3c000 length: 0x1000 READ64 image: 13 offset: 0x3d000 length: 0x1000 READ64 image: 13 offset: 0x3e000 length: 0x1000 READ64 image: 13 offset: 0x3f000 length: 0x1000 READ64 image: 13 offset: 0x40000 length: 0x1000 READ64 image: 13 offset: 0x41000 length: 0x1000 READ64 image: 13 offset: 0x42000 length: 0x1000 READ64 image: 13 offset: 0x43000 length: 0x1000 READ64 image: 13 offset: 0x44000 length: 0x1000 READ64 image: 13 offset: 0x45000 length: 0x1000 READ64 image: 13 offset: 0x46000 length: 0x1000 READ64 image: 13 offset: 0x47000 length: 0x1000 READ64 image: 13 offset: 0x48000 length: 0x1000 READ64 image: 13 offset: 0x49000 length: 0x1000 READ64 image: 13 offset: 0x4a000 length: 0x1000 READ64 image: 13 offset: 0x4b000 length: 0x1000 READ64 image: 13 offset: 0x4c000 length: 0x1000 READ64 image: 13 offset: 0x4d000 length: 0x1000 READ64 image: 13 offset: 0x4e000 length: 0x1000 READ64 image: 13 offset: 0x4f000 length: 0x1000 READ64 image: 13 offset: 0x50000 length: 0x1000 READ64 image: 13 offset: 0x51000 length: 0x1000 READ64 image: 13 offset: 0x52000 length: 0x1000 READ64 image: 13 offset: 0x53000 length: 0x1000 READ64 image: 13 offset: 0x54000 length: 0x1000 READ64 image: 13 offset: 0x55000 length: 0x1000 READ64 image: 13 offset: 0x56000 length: 0x1000 READ64 image: 13 offset: 0x57000 length: 0x1000 READ64 image: 13 offset: 0x58000 length: 0x1000 READ64 image: 13 offset: 0x59000 length: 0x1000 READ64 image: 13 offset: 0x5a000 length: 0x1000 READ64 image: 13 offset: 0x5b000 length: 0x1000 READ64 image: 13 offset: 0x5c000 length: 0x1000 READ64 image: 13 offset: 0x5d000 length: 0x1000 READ64 image: 13 offset: 0x5e000 length: 0x1000 READ64 image: 13 offset: 0x5f000 length: 0x1000 READ64 image: 13 offset: 0x60000 length: 0x1000 READ64 image: 13 offset: 0x61000 length: 0x1000 READ64 image: 13 offset: 0x62000 length: 0x1000 READ64 image: 13 offset: 0x63000 length: 0x1000 READ64 image: 13 offset: 0x64000 length: 0x1000 READ64 image: 13 offset: 0x65000 length: 0x16c READ64 image: 13 offset: 0x65170 length: 0x1000 READ64 image: 13 offset: 0x66170 length: 0x1000 READ64 image: 13 offset: 0x67170 length: 0x1000 READ64 image: 13 offset: 0x68170 length: 0x1000 READ64 image: 13 offset: 0x69170 length: 0x1000 READ64 image: 13 offset: 0x6a170 length: 0x1000 READ64 image: 13 offset: 0x6b170 length: 0x1000 READ64 image: 13 offset: 0x6c170 length: 0x1000 READ64 image: 13 offset: 0x6d170 length: 0x1000 READ64 image: 13 offset: 0x6e170 length: 0x1000 READ64 image: 13 offset: 0x6f170 length: 0x1000 READ64 image: 13 offset: 0x70170 length: 0x1000 READ64 image: 13 offset: 0x71170 length: 0x6a0 READ64 image: 13 offset: 0x71810 length: 0x1000 READ64 image: 13 offset: 0x72810 length: 0x1000 READ64 image: 13 offset: 0x73810 length: 0x1000 READ64 image: 13 offset: 0x74810 length: 0x1000 READ64 image: 13 offset: 0x75810 length: 0x1000 READ64 image: 13 offset: 0x76810 length: 0x1000 READ64 image: 13 offset: 0x77810 length: 0x1000 READ64 image: 13 offset: 0x78810 length: 0x1000 READ64 image: 13 offset: 0x79810 length: 0x1000 READ64 image: 13 offset: 0x7a810 length: 0x1000 READ64 image: 13 offset: 0x7b810 length: 0x1000 READ64 image: 13 offset: 0x7c810 length: 0x1000 READ64 image: 13 offset: 0x7d810 length: 0x1000 READ64 image: 13 offset: 0x7e810 length: 0x1000 READ64 image: 13 offset: 0x7f810 length: 0x1000 READ64 image: 13 offset: 0x80810 length: 0x1000 READ64 image: 13 offset: 0x81810 length: 0xcc READ64 image: 13 offset: 0x818e0 length: 0x84 READ64 image: 13 offset: 0x81964 length: 0x1000 READ64 image: 13 offset: 0x82964 length: 0x1000 READ64 image: 13 offset: 0x83964 length: 0x1000 READ64 image: 13 offset: 0x84964 length: 0x1000 READ64 image: 13 offset: 0x85964 length: 0x1000 READ64 image: 13 offset: 0x86964 length: 0x1000 READ64 image: 13 offset: 0x87964 length: 0x1000 READ64 image: 13 offset: 0x88964 length: 0x134 READ64 image: 13 offset: 0x88a98 length: 0x1000 READ64 image: 13 offset: 0x89a98 length: 0x1000 READ64 image: 13 offset: 0x8aa98 length: 0x1000 READ64 image: 13 offset: 0x8ba98 length: 0x1000 READ64 image: 13 offset: 0x8ca98 length: 0x1000 READ64 image: 13 offset: 0x8da98 length: 0x1000 READ64 image: 13 offset: 0x8ea98 length: 0x3f0 READ64 image: 13 offset: 0x8ee88 length: 0x1000 READ64 image: 13 offset: 0x8fe88 length: 0x1000 READ64 image: 13 offset: 0x90e88 length: 0x1000 READ64 image: 13 offset: 0x91e88 length: 0x1000 READ64 image: 13 offset: 0x92e88 length: 0x1000 READ64 image: 13 offset: 0x93e88 length: 0x1000 READ64 image: 13 offset: 0x94e88 length: 0x3f0 READ64 image: 13 offset: 0x95278 length: 0x1000 READ64 image: 13 offset: 0x96278 length: 0x1000 READ64 image: 13 offset: 0x97278 length: 0x1000 READ64 image: 13 offset: 0x98278 length: 0x1000 READ64 image: 13 offset: 0x99278 length: 0x1000 READ64 image: 13 offset: 0x9a278 length: 0x1000 READ64 image: 13 offset: 0x9b278 length: 0x1000 READ64 image: 13 offset: 0x9c278 length: 0x1000 READ64 image: 13 offset: 0x9d278 length: 0x1000 READ64 image: 13 offset: 0x9e278 length: 0x1000 READ64 image: 13 offset: 0x9f278 length: 0x1000 READ64 image: 13 offset: 0xa0278 length: 0x1000 READ64 image: 13 offset: 0xa1278 length: 0x1000 READ64 image: 13 offset: 0xa2278 length: 0x1000 READ64 image: 13 offset: 0xa3278 length: 0x1000 READ64 image: 13 offset: 0xa4278 length: 0x1000 READ64 image: 13 offset: 0xa5278 length: 0x1000 READ64 image: 13 offset: 0xa6278 length: 0x1000 READ64 image: 13 offset: 0xa7278 length: 0x1000 READ64 image: 13 offset: 0xa8278 length: 0x1000 READ64 image: 13 offset: 0xa9278 length: 0x1000 READ64 image: 13 offset: 0xaa278 length: 0x1000 END OF IMAGE image: 13 status: 0 DONE status: 1 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Binary build date: Aug 17 2021 @ 23:37:37" /></data> LOG: INFO: Binary build date: Aug 17 2021 @ 23:37:37 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Binary build date: Aug 17 2021 @ 23:37:37 " /></data> LOG: INFO: Binary build date: Aug 17 2021 @ 23:37:37 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Chip serial num: 967560625 (0x39abcdb1)" /></data> LOG: INFO: Chip serial num: 967560625 (0x39abcdb1) FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Supported Functions (15):" /></data> LOG: INFO: Supported Functions (15): FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: program" /></data> LOG: INFO: program FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: read" /></data> LOG: INFO: read FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: nop" /></data> LOG: INFO: nop FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: patch" /></data> LOG: INFO: patch FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: configure" /></data> LOG: INFO: configure FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: setbootablestoragedrive" /></data> LOG: INFO: setbootablestoragedrive FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: erase" /></data> LOG: INFO: erase FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: power" /></data> LOG: INFO: power FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: firmwarewrite" /></data> LOG: INFO: firmwarewrite FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: getstorageinfo" /></data> LOG: INFO: getstorageinfo FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: benchmark" /></data> LOG: INFO: benchmark FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: emmc" /></data> LOG: INFO: emmc FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: ufs" /></data> LOG: INFO: ufs FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: fixgpt" /></data> LOG: INFO: fixgpt FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: getsha256digest" /></data> LOG: INFO: getsha256digest FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: End of supported functions 15" /></data> LOG: INFO: End of supported functions 15 qdl: firehose operation timed out FIREHOSE WRITE: <?xml version="1.0"?> <data><configure MemoryName="ufs" MaxPayloadSizeToTargetInBytes="1048576" verbose="0" ZLPAwareHost="1" SkipStorageInit="0"/></data> FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Calling handler for configure" /></data> LOG: INFO: Calling handler for configure FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Storage type set to value UFS" /></data> LOG: INFO: Storage type set to value UFS FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <response value="ACK" MemoryName="UFS" MinVersionSupported="1" Version="1" MaxPayloadSizeToTargetInBytes="1048576" MaxPayloadSizeToTargetInBytesSupported="1048576" MaxXMLSizeInBytes="4096" DateTime="Aug 17 2021 - 23:37:37" /></data> [CONFIGURE] max payload size: 1048576 FIREHOSE WRITE: <?xml version="1.0"?> <data><program SECTOR_SIZE_IN_BYTES="4096" num_partition_sectors="32776" physical_partition_number="0" start_sector="3154440" filename="qti-ubuntu-robotics-image-qrb5165-rb5-sysfs_1.ext4"/></data> FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Calling handler for program" /></data> LOG: INFO: Calling handler for program FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to initialize (open whole lun) UFS Device slot 0 partition 0" /></data> LOG: ERROR: Failed to initialize (open whole lun) UFS Device slot 0 partition 0 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to open the device:3 slot:0 partition:0 error:0" /></data> LOG: ERROR: Failed to open the device:3 slot:0 partition:0 error:0 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: OPEN handle NULL and no error, weird 344489460" /></data> LOG: ERROR: OPEN handle NULL and no error, weird 344489460 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to open device, type:UFS, slot:0, lun:0 error:3" /></data> LOG: ERROR: Failed to open device, type:UFS, slot:0, lun:0 error:3 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <response value="NAK" rawmode="false" /></data> [PROGRAM] failed to setup programmingVOXL2 is in EDL mode only , SW2 switch is in on position.
Please help ASAP
-
VOXL Sentinel Drone adb shell not working@tom,
It will not be possible to go with the RMA. As I am in India, It will take a lot of time and money to ship the drone.
But also, What is the problem with the drone, if it has been tested for flight upto 30 mins before shipping, why I am facing this problem?
Let's say, I follow the un-bricking process, this will delete all the Ready to fly configurations provided by the Modal AI. Making the purchase of this drone redundant.
Would you provide me any support like video call/remote access to proceed with un-bricking the drone and further making the drone function, how it should have been after shipment?I express, disappointment with this product as we did not receive drone as promised by the website!
Please let me know a solution that is beneficial for both of us.
-
VOXL Sentinel Drone adb shell not working@tom
It came straight out of the box, did not open anything -
VOXL Sentinel Drone adb shell not workingI bought the Sentinel Drone from Modal AI, Just unpacked it today. I ran adb shell after connecting the board type c to my laptop, but it says no devices found.
Also, when I do lsusb it says :
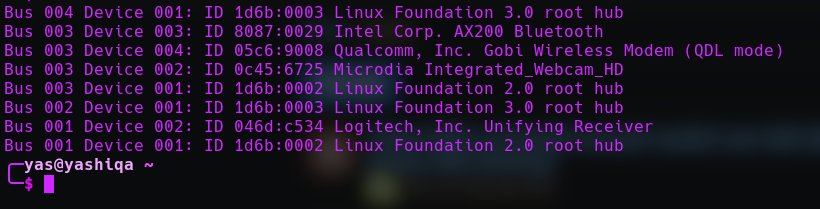
Though , its detected, it says its in QDL Mode.
Even Fastboot devices does not workI even sent a mail to Modal AI team asking about the issue, they said that the drone is tested for 30 mins before testing.
Please help ASAP.
Thank you -
VOXL2 ESC calibration issueYes , I just changed num_per_cycle , re calibrated the esc. It flew!
Did not do any calibration from PX4 side.
Is there any PX4 calibration tool? -
VOXL2 ESC calibration issueThank you @Alex-Kushleyev , your solution works.
I changed all the params and calibratied again.
It worked. I am attaching the video again.Thanks again!
-
VOXL2 ESC calibration issueWe calibrated using props again , and we got the following curve
Here is the calibaration curve
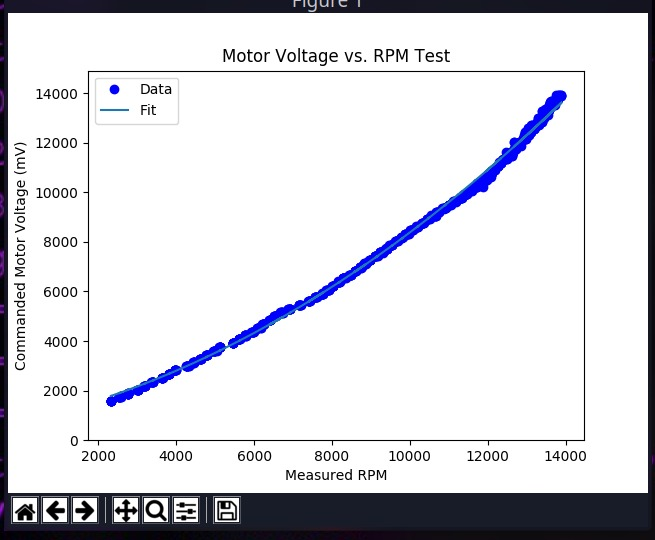
Also we uploaded new params file after changing the pwm_rpm curve values in the params file
esc_params_modalai_4_in_1_reva <?xml version="1.0" encoding="UTF-8"?> <!-- Copyright (c) 2020 ModalAI Inc. Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met: 1. Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer. 2. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution. 3. Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission. 4. The Software is used solely in conjunction with devices provided by ModalAI Inc. THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. For a license to use on non-ModalAI hardware, please contact license@modalai.com --> <EscParameters> <IdParams> <param name="id" value="127"/> <!-- 0-7 .. 127 means use hardware ID pins to read ID--> <param name="dir" value="2"/> <!-- 0=fwd, 1=rev, 2=fwd id-based, 3=rev id-based --> </IdParams> <BoardParams> <param name="id_map" value="[0, 1, 2, 3, 4, 5, 6, 7]"/> <!-- reserved for future use --> <param name="vsense_scale" value="6.0"/> <!-- voltage_mv = adc_val_mv * vsense_mult / vsense_ div --> <param name="isense_scale" value="10.35"/> <!-- Ima * 0.002 * 50 = Vmv, so mult is 1 / (0.002 * 50) = 10 . Note that actual gain is a bit off --> <param name="isense_zero_mv" value="550"/> <!-- voltage offset of current sensor when current is zero (0.55V by design) --> </BoardParams> <UartParams> <param name="protocol_version" value="2"/> <!-- reserved for future use --> <param name="input_mode" value="0"/> <!-- reserved for future use --> <param name="baud_rate" value="250000"/> <!-- communication bit rate --> <param name="char_timeout_ns" value="0"/> <!-- not used --> <param name="cmd_timeout_ns" value="100000000"/> <!-- timeout for incoming commands before ESC will stop the motor --> </UartParams> <TuneParams> <param name="pwm_frequency" value="48000"/> <!-- switching freqency of PWM signal going to motors. 24Khz and 48Khz are only options for now --> <param name="vbat_nominal_mv" value="14800"/> <!-- used for sanity checking and limiting of voltage-dependent funcions --> <param name="num_cycles_per_rev" value="12"/> <!-- number of pole pairs in the motor. used for converting electrical frequency to mechanical rpm --> <param name="min_rpm" value="2000"/> <!-- minimum RPM that will be attempted, otherwise capped --> <param name="max_rpm" value="14000"/> <!-- maximum RPM that will be attempted, otherwise capped --> <param name="min_pwm" value="50"/> <!-- cap for minimum power to be ever applied. max is 999 --> <param name="max_pwm" value="999"/> <!-- cap for maximum power to be ever applied. max is 999 --> <param name="pwm_vs_rpm_curve_a0" value="820.9319894407308"/> <!-- this is actually motor_voltage vs rpm curve.. using legacy naming --> <param name="pwm_vs_rpm_curve_a1" value="0.32413781010302617"/> <!-- Emax RS1306 3300KV with tri-blade 3x3x3 --> <param name="pwm_vs_rpm_curve_a2" value="4.3083453074080803e-05"/> <param name="kp" value="130"/> <!-- RPM controller proportional gain --> <param name="ki" value="30"/> <!-- RPM controller proportional gain --> <param name="max_kpe" value="300"/> <!-- maximum proportional erorr term (max is 999) --> <param name="max_kie" value="100"/> <!-- maximum integral error term (max is 999) --> <param name="max_rpm_delta" value="1200"/> <!-- cap for maximum rpm error used in RPM controller --> <param name="alignment_time_ns" value="0"/> <param name="spinup_power" value="50"/> <!-- power used to give the motor initial kick (out of 999) --> <param name="latch_power" value="60"/> <!-- power used during latching stage of spin-up (out of 999)--> <param name="min_num_cross_for_closed_loop" value="50"/> <!-- exit latching mode of fixed power after this number of zero crossings --> <param name="brake_to_stop" value="0"/> <!-- apply brake when stopping motor (or not) --> <param name="stall_timeout_ns" value="20000000"/> <!-- after spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="require_reset_if_stalled" value="0"/> <!-- require sending an array of zero commands to reset before next spin-up, if motor stalled --> <param name="tone_freqs_10hz" value="[200, 215, 225, 250]"/> <!-- 200 is 2000Hz, max 255 --> <param name="tone_times_ms" value="[10, 10, 10, 10]"/> <!-- duration of each tone in units of 10 milli-seconds. Poor naming!!! --> <param name="tone_powers" value="[100, 100, 100, 100]"/> <!-- max is 255 --> <param name="dt_threshold_ns" value="150000"/> <!-- during start up, ignore inter-commutation times less than this val, probably noise --> <param name="max_dt_ns" value="2500000"/> <!-- min and max values for time between two commutations. these are used as caps --> <param name="min_dt_ns" value="10000"/> <param name="dt_bootstrap_ns" value="2000000"/> <!-- filter bootstrap value for commutation dt during start up --> <param name="spinup_stall_dt_ns" value="6000000"/> <!-- during spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="spinup_stall_check_ns" value="30000000"/> <!-- time after beginning of spinup to start checking for spinup stall --> <param name="timing_advance" value="0"/> <param name="sense_advance" value="0"/> <param name="demag_timing" value="0"/> <!-- unused --> </TuneParams> </EscParameters>When we did tried testing with rc (TBS CRSF)
The motors stated to jerk a after a particular value. But now its able to hover.
Due to this the motors are getting hot.
Here is video of the testing https://drive.google.com/file/d/1AI8XXBeXe78EUSjfSondXSTwdiGqmcOd/view?usp=sharingThanks for your help
-
VOXL2 ESC calibration issueI am facing issues with esc calibration.
Out motor setup is EMAX 1407 3300KV.
On no load it is pulling 10Amps but the motors are heating till extent of it burning during calibration.
I ran voxl-esc-tools provided in the website.
Also , VOXL2 is arming and when we tested VOXL2 drone. After particular throttle input value the motor directions are reversed.
While doing the spin test we are able to get correct rpm as specified in the command.
Only during the calibration we are facing motor heating issue.
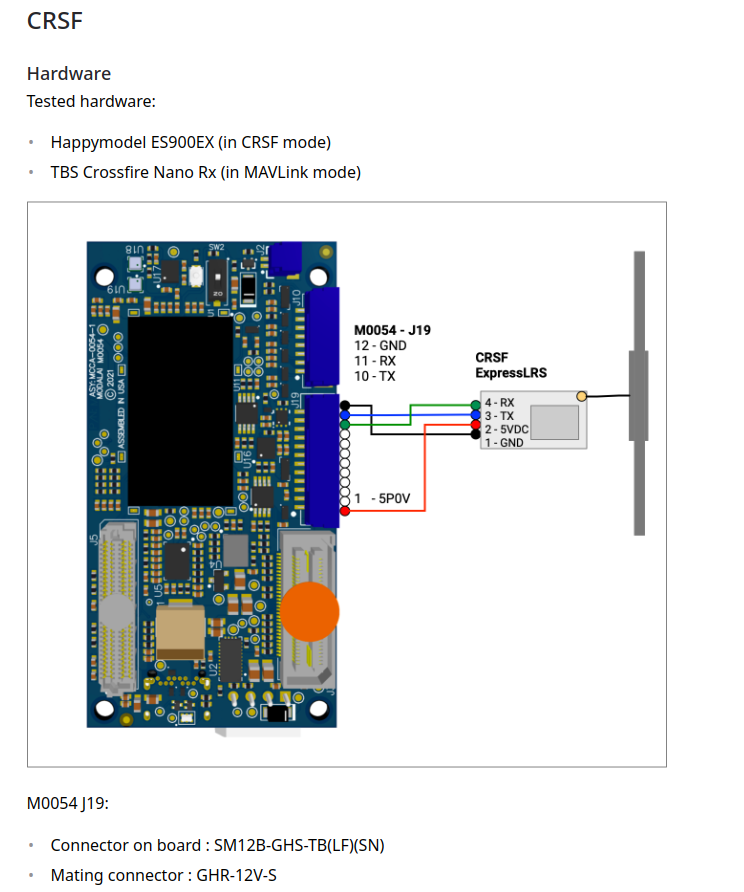
The configurtion of the VOXL2 is with TBS crsf reciver and MATEKYS gps/mag. -
VOXL2 not armingVOXL2 is arming now. Thanks for the response!
We are facing new issues with esc calibration.
Out motor setup is EMAX 1407 3300KV.
On no load it is pulling 10Amps but the motors are heating till extent of it burning during calibration.
I ran voxl-esc-tools provided in the website.
Also , When we tested VOXL2 drone. After particular throttle input value the motor directions are reversed.
While doing the spin test we are able to get correct rpm as specified in the command.
Only during the calibration we are facing motor heating issue. -
VOXL2 not armingI did not understand by what do you mean by connecting TBS crossfire receiver to QGC.
I know that communication between PX4 and QGC happens through UDP then through mavlink.
I just have a expander board , with a usb wifi adapter connected to it. -
VOXL2 not armingThis -r flag worked I am able to rc data! , I edited the service file to add -r.
But I am facing another issue.
The connection between Qgrouncontrol keeps getting dropped and connected again.
I have set voxl-configure-mpa --factory-reset.
As I had to disable those when I run voxl-px4 manually.
Is there something wrong there?voxl2:/$ voxl-px4 -r Found DSP signature file INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM. INFO [px4] assuming working directory is rootfs, no symlinks needed. ______ __ __ ___ | ___ \ \ \ / / / | | |_/ / \ V / / /| | | __/ / \ / /_| | | | / /^\ \ \___ | \_| \/ \/ |_/ px4 starting. INFO [px4] Calling startup script: /bin/sh /etc/modalai/voxl-px4.config 0 Running on M0054 INFO [muorb] SLPI: Creating qurt thread hpwork INFO [muorb] SLPI: Successfully created px4 task PX4_hpwork with tid 83 INFO [muorb] SLPI: Creating qurt thread lpwork INFO [muorb] SLPI: Successfully created px4 task PX4_lpwork with tid 82 INFO [muorb] SLPI: Creating qurt thread wkr_hrt INFO [muorb] SLPI: Successfully created px4 task PX4_wkr_hrt with tid 81 INFO [muorb] SLPI: Creating qurt thread client_sync_thread INFO [muorb] SLPI: Successfully created px4 task PX4_client_sync_thread with tid 80 INFO [muorb] SLPI: Creating qurt thread wq_manager INFO [muorb] SLPI: Successfully created px4 task PX4_wq_manager with tid 79 INFO [muorb] SLPI: Creating qurt thread qshell INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 78 INFO [qshell] Send cmd: 'icm42688p start -s' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icm42688p start -s INFO [muorb] SLPI: Creating qurt thread wq_SPI1 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_SPI1 with tid 77 INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378 INFO [uorb] Advertising remote topic sensor_accel INFO [uorb] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to INFO [uorb] Advertising remote topic sensor_gyro INFO [uorb] Advertising remote topic imu_server INFO [muorb] SLPI: on SPI bus 1 INFO [muorb] SLPI: icm42688p #0 on SPI bus 1 (devid=0x0) INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: icm42688p start -s INFO [muorb] SLPI: Sending qshell retval with timestamp 49225949, current timestamp 49225949 INFO [uorb] Advertising remote topic qshell_retval INFO [qshell] qshell return value timestamp: 49225949, local time: 49231289 INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic ERROR [muorb] SLPI: Cannot reset all parameters on client side INFO [uorb] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic INFO [muorb] SLPI: Advertising remote topic parameter_update INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to INFO [uorb] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic INFO [logger] logger started (mode=all) Starting Holybro magnetometer INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1 INFO [muorb] SLPI: Creating qurt thread wq_I2C1 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C1 with tid 76 INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809 ERROR [muorb] SLPI: i2c probe failed ERROR [muorb] SLPI: Failed to execute command: ist8310 start -R 10 -X -b 1 INFO [muorb] SLPI: Sending qshell retval with timestamp 51937708, current timestamp 51937709 INFO [qshell] cmd returned with: -1 INFO [qshell] qshell return value timestamp: 51937708, local time: 51939344 ERROR [qshell] Command failed Starting Holybro LED driver INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [muorb] SLPI: Creating qurt thread wq_I2C1 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C1 with tid 4172 INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273 ERROR [muorb] SLPI: i2c probe failed ERROR [muorb] SLPI: Failed to execute command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [muorb] SLPI: Sending qshell retval with timestamp 51984318, current timestamp 51984320 INFO [qshell] cmd returned with: -1 INFO [qshell] qshell return value timestamp: 51984318, local time: 51986095 ERROR [qshell] Command failed INFO [qshell] Send cmd: 'icp10100 start -I -b 5' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icp10100 start -I -b 5 INFO [muorb] SLPI: Creating qurt thread wq_I2C5 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C5 with tid 8268 INFO [muorb] SLPI: *** I2C Device ID 0x9c6329 10249001 INFO [muorb] SLPI: probe probe succeeded. data = 0x1 0x48 INFO [muorb] SLPI: icp10100 #0 on I2C bus 5 INFO [muorb] SLPI: Ok executing command: icp10100 start -I -b 5 INFO [muorb] SLPI: Sending qshell retval with timestamp 52031607, current timestamp 52031609 INFO [qshell] qshell return value timestamp: 52031607, local time: 52033362 INFO [qshell] Send cmd: 'modalai_esc start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [uorb] Advertising remote topic sensor_baro INFO [muorb] SLPI: qshell gotten: modalai_esc start INFO [muorb] SLPI: Creating qurt thread wq_hp_default INFO [muorb] SLPI: Successfully created px4 task PX4_wq_hp_default with tid 75 INFO [uorb] Advertising remote topic test_motor INFO [muorb] SLPI: Ok executing command: modalai_esc start INFO [muorb] SLPI: Sending qshell retval with timestamp 52107976, current timestamp 52107978 INFO [muorb] SLPI: Opened UART ESC device INFO [qshell] qshell return value timestamp: 52107976, local time: 52109827 INFO [qshell] Send cmd: 'mixer load /dev/uart_esc quad_x.main.mix' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mixer load /dev/uart_esc quad_x.main.mix INFO [muorb] SLPI: Creating qurt thread wq_rate_ctrl INFO [muorb] SLPI: Successfully created px4 task PX4_wq_rate_ctrl with tid 73 INFO [muorb] SLPI: Ok executing command: mixer load /dev/uart_esc quad_x.main.mix INFO [muorb] SLPI: Sending qshell retval with timestamp 52178454, current timestamp 52178456 INFO [qshell] qshell return value timestamp: 52178454, local time: 52181721 INFO [uorb] Advertising remote topic actuator_outputs INFO [uorb] Advertising remote topic multirotor_motor_limits INFO [qshell] Send cmd: 'voxlpm start -X -b 2' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2 INFO [muorb] SLPI: Creating qurt thread wq_I2C2 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C2 with tid 4171 INFO [muorb] SLPI: *** I2C Device ID 0x784411 7881745 INFO [uorb] Advertising remote topic battery_status INFO [muorb] SLPI: voxlpm #0 on I2C bus 2 (external) INFO [muorb] SLPI: Ok executing command: voxlpm start -X -b 2 INFO [muorb] SLPI: Sending qshell retval with timestamp 52248695, current timestamp 52248698 INFO [qshell] qshell return value timestamp: 52248695, local time: 52250854 INFO [uorb] Advertising remote topic power_monitor Starting Holybro GPS INFO [qshell] Send cmd: 'gps start -d 7 -b 115200' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: gps start -d 7 -b 115200 INFO [muorb] SLPI: Creating qurt thread gps INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 72 INFO [muorb] SLPI: Ok executing command: gps start -d 7 -b 115200 INFO [muorb] SLPI: Sending qshell retval with timestamp 52317126, current timestamp 52317128 INFO [qshell] qshell return value timestamp: 52317126, local time: 52318912 Starting TBS crossfire RC - MAV Mode INFO [qshell] Send cmd: 'tbs_crossfire start -m -p 7 -b 115200' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: tbs_crossfire start -m -p 7 -b 115200 INFO [muorb] SLPI: Creating qurt thread tbs_crossfire_main INFO [muorb] SLPI: Successfully created px4 task PX4_tbs_crossfire_main with tid 70 INFO [muorb] SLPI: Ok executing command: tbs_crossfire start -m -p 7 -b 115200 INFO [muorb] SLPI: Sending qshell retval with timestamp 52348137, current timestamp 52348139 INFO [muorb] SLPI: Creating qurt thread tbs_crossfire_mav INFO [muorb] SLPI: Successfully created px4 task PX4_tbs_crossfire_mav with tid 69 INFO [qshell] qshell return value timestamp: 52348137, local time: 52351007 INFO [qshell] Send cmd: 'sensors start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: sensors start INFO [muorb] SLPI: Creating qurt thread wq_nav_and_controllers INFO [muorb] SLPI: Successfully created px4 task PX4_wq_nav_and_controllers with tid 67 INFO [uorb] Advertising remote topic vehicle_acceleration INFO [muorb] SLPI: Ok executing command: sensors start INFO [muorb] SLPI: Sending qshell retval with timestamp 53436075, current timestamp 53436077 INFO [uorb] Advertising remote topic vehicle_angular_acceleration INFO [uorb] Advertising remote topic vehicle_angular_velocity INFO [qshell] qshell return value timestamp: 53436075, local time: 53443048 INFO [muorb] SLPI: Creating qurt thread wq_INS0 INFO [muorb] SLPI: Successfully created px4 task PX4_wq_INS0 with tid 66 INFO [uorb] Advertising remote topic vehicle_imu INFO [uorb] Advertising remote topic vehicle_imu_status INFO [uorb] Advertising remote topic sensors_status_imu INFO [uorb] Advertising remote topic vehicle_air_data INFO [uorb] Advertising remote topic sensor_selection INFO [uorb] Advertising remote topic sensor_combined INFO [qshell] Send cmd: 'ekf2 start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ekf2 start INFO [muorb] SLPI: Ok executing command: ekf2 start INFO [muorb] SLPI: Sending qshell retval with timestamp 53738412, current timestamp 53738414 INFO [qshell] qshell return value timestamp: 53738412, local time: 53741299 INFO [uorb] Advertising remote topic ekf2_timestamps INFO [qshell] Send cmd: 'mc_pos_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_pos_control start INFO [muorb] SLPI: Ok executing command: mc_pos_control start INFO [muorb] SLPI: Sending qshell retval with timestamp 53806315, current timestamp 53806317 INFO [qshell] qshell return value timestamp: 53806315, local time: 53809617 INFO [qshell] Send cmd: 'mc_att_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_att_control start INFO [muorb] SLPI: Ok executing command: mc_att_control start INFO [muorb] SLPI: Sending qshell retval with timestamp 53883470, current timestamp 53883473 INFO [qshell] qshell return value timestamp: 53883470, local time: 53887354 INFO [qshell] Send cmd: 'mc_rate_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_rate_control start INFO [muorb] SLPI: Ok executing command: mc_rate_control start INFO [muorb] SLPI: Sending qshell retval with timestamp 53979850, current timestamp 53979852 INFO [qshell] qshell return value timestamp: 53979850, local time: 53981827 INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start INFO [muorb] SLPI: Sending qshell retval with timestamp 54052733, current timestamp 54052736 INFO [qshell] qshell return value timestamp: 54052733, local time: 54054615 INFO [qshell] Send cmd: 'land_detector start multicopter' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: land_detector start multicopter INFO [muorb] SLPI: Ok executing command: land_detector start multicopter INFO [muorb] SLPI: Sending qshell retval with timestamp 54117935, current timestamp 54117938 INFO [qshell] qshell return value timestamp: 54117935, local time: 54120972 INFO [uorb] Advertising remote topic vehicle_land_detected INFO [commander] LED: open /dev/led0 failed (22) INFO [muorb] SLPI: Advertising remote topic led_control INFO [muorb] SLPI: Advertising remote topic tune_control INFO [PreFlightCheck] Failed EKF health preflight check while waiting for filter to settle INFO [muorb] SLPI: Advertising remote topic vehicle_control_mode INFO [muorb] SLPI: Advertising remote topic vehicle_status INFO [muorb] SLPI: Advertising remote topic actuator_armed INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet INFO [muorb] SLPI: Advertising remote topic commander_state INFO [muorb] SLPI: Advertising remote topic vehicle_status_flags INFO [uorb] Advertising remote topic rate_ctrl_status INFO [uorb] Advertising remote topic actuator_controls_0 INFO [muorb] SLPI: Advertising remote topic vehicle_command INFO [commander] Handling Commander command 176 INFO [muorb] SLPI: Advertising remote topic vehicle_command_ack INFO [mavlink] Enabling TBS Crossfire mode in mavlink INFO [mavlink] mode: Minimal, data rate: 10000 B/s on udp port 14556 remote port 14557 INFO [muorb] SLPI: Marking DeviceNode(vehicle_command) as advertised in process_remote_topic INFO [mavlink] MAVLink only on localhost (set param MAV_BROADCAST = 1 to enable network) INFO [muorb] SLPI: Advertising remote topic telemetry_status INFO [px4] Startup script returned successfully pxh> INFO [uorb] Marking DeviceNode(mavlink_rx_msg) as advertised in process_remote_topicThanks for helping
-
VOXL2 not armingThere is nothing coming through the RX pin. I launched VOXL-PX4 manually after disabling mavlink server and voxl-px4.
When I set csrf to mavlink mode , there is no error in px4 terminal. But there is no rc_input(never published).
Same result with ppm also. when set at sbus , ibus , dsmx modes.
Also , I get an error saying PX4-IO failed to detect.
I am assuming that only works with we have IO expander board which we are not using currently.
Is that the problem? -
VOXL2 not armingI don't understand how to use the drivers , the link provided in the docs is depreciated.
I checked with oscilloscope on Voxl2 TX : we got heartbeat packets. but input_rc is never published.
This oscliscope's output:
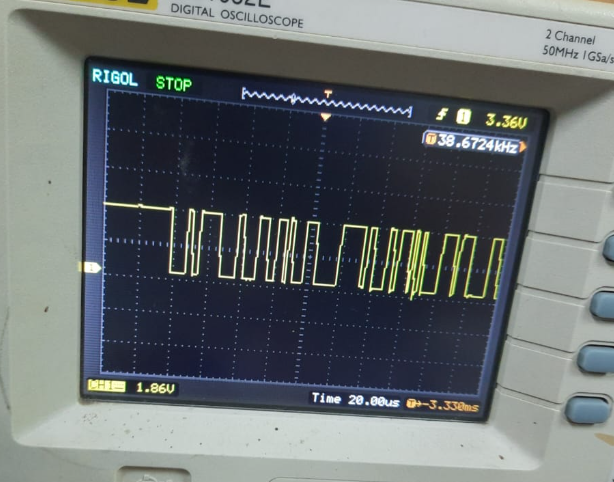
Pls help , Thanks in advance
-
VOXL2 not armingYes , I trying to build a custom with VOXl2. I am trying to using a TBS crossfire in mavlink mode.
The ports i am using is the same as proivided in the documentation for crossfire recvierThe RC is able to bind to the transmitter TBS Tango , but Qgc shows RC RSSI in unavailble.
Even px4-listener input_rc , shows output never published.
I want to know where I have gone wrong , Pls help
-
VOXL2 not armingHello, Thanks for such fast response.
I re flashed voxl2 , connected the motors , and crsf rc.
The rc is able to bind (as it showing green light) but in qgc , it tells RC RSSI is unavailable.
The connection has been refred to by https://docs.modalai.com/voxl2-rc-configs/
I will move on to gps/mag once this gets fixed.Thanks in advance
-
VOXL2 not arminghello , I have bought VOXL2 , I have setup voxl-vission-px4 and connected the modal ai 's esc to the board.
The Qgroundcontrol is able to connect to the voxl2 but i am not able to run motor tests (they are not running). The compass is not calibrating when a UBlox m8n gps. All the mpa services are running but I am not able to arm the board.If i disable the compass in qgc, then arm it . i get a message that mav_cmd has rejected arming request.
Pls respond asap , I am not sure where i have gone wrong.
-
Voxl PX4 firmware not workingI tried the link you provided,the ECS is not intalising and ardupilots firmware and voxl is not able to communicate with the px4.
Also stats provided in voxl portal about px4 there is not available.Is it possible we meet on a call on any meeting platform, So that we can solve this issue easily?
Thank you
