@James-Strawson yes,we only test uav in position mode. we didn't use manual for testing.
Vũ Văn Long
@Vũ Văn Long
Posts
-
VOXL M500 vision problem!! -
VOXL M500 vision problem!!pls help me soon. we can set up an online support via teamview to make the problem more clearly.
-
VOXL M500 vision problem!!last week it used to work normally. i did't changed any strange thing, just re-configuration the drone to the factory state. by "voxl-configure-vision-px4 -f" to take again the NED position cuz before that i had config vision lib by "voxl-configure-modalai-vl" and the local poistion is lost.
-
VOXL M500 vision problem!!the local NED position is look good at the init state as well as when i move the drone into the other location.
-
VOXL M500 vision problem!!hi, here is the video i just captured https://drive.google.com/file/d/1Am63zD09am8nx_BBpAB2JfTYcf_IFMST/view?usp=sharing
-
VOXL M500 vision problem!!it just is a whitle floor like this

-
VOXL M500 vision problem!!Hello, me again my voxl m500 frame is driff while fly in position mode
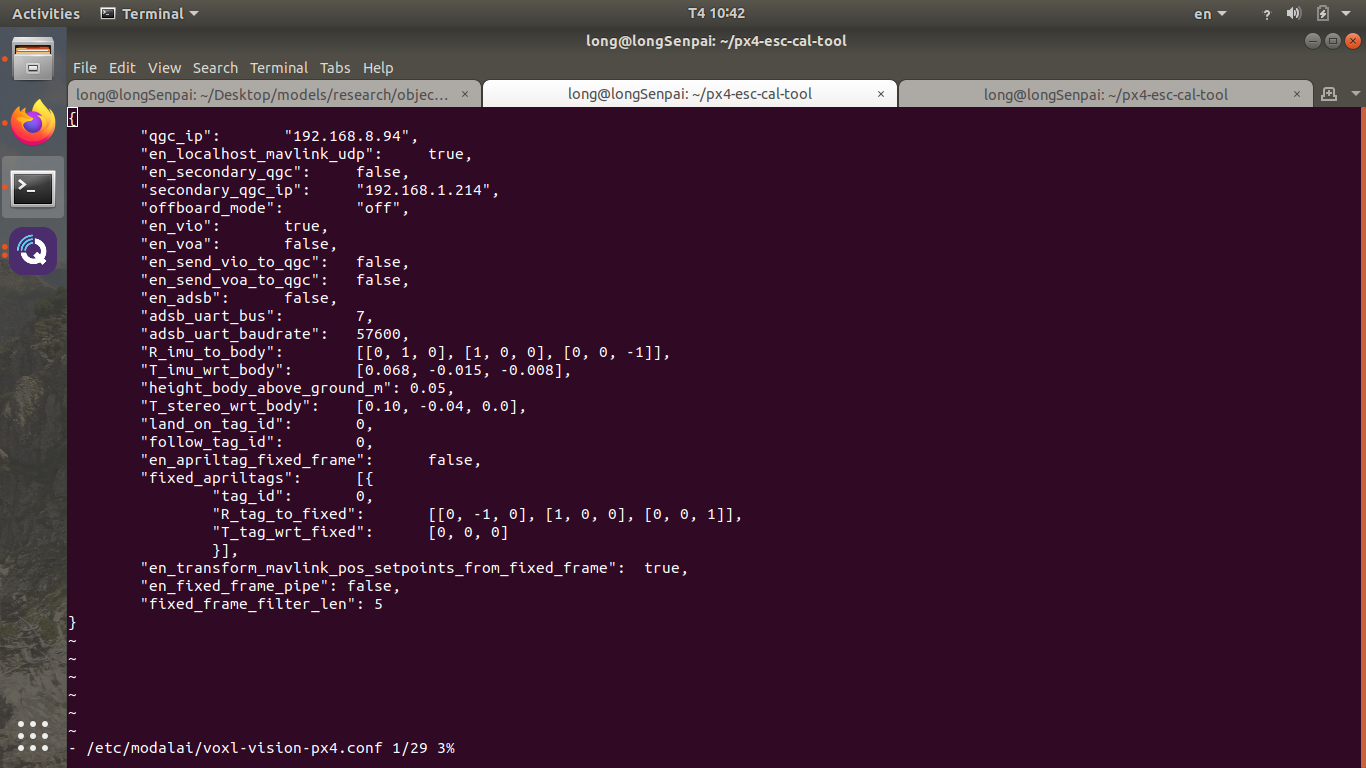
here is the voxl/vision-px4.conf text. last time after reset the configuration to the factory -> then i also changed the offboard mode to "off" and the m500 can fly in poistion mode but the performance is not good, it's mean sometime the the driff was maintained. i think the problem is not here. (about reset the vision-config to the factory, i just reset and not config anything...
pls help me! -
M500 driff when flying VIO indoor navigation.@Chad-Sweet oh my godness. My mistaken, i didn't realise that before that i had configured UAV off board mode. when I check the /etc/modalai/voxl-vision-px4.conf the offboard_mode ="figure_eight" => so that's why it's cause the problem here. anyway, it's work again, thank you so much for the effective support
-
M500 driff when flying VIO indoor navigation.Here is the video of flight with position mode, what is the problem ???
video link -
M500 driff when flying VIO indoor navigation.every step is correct with the manual document. Here is what we do with the UAV. In the last week i had tested the UAV load in position mode and it's work well, after that i also tried with MavROS node to take-off UAV in Offboard mode. we would set the altitude to take off is 0.5 m but the UAV takeoff higher than 1m much (i had build rosnode after launch).
But it was other problem, in this week we had installed a asus xtion camera and a raspberry pi at the bottom of m500 frame, then trying to maunally filght at position mode but the driff has occurred. -
M500 driff when flying VIO indoor navigation.@modaltb hi, i'm just trying to take-off manually though RC in position mode.
-
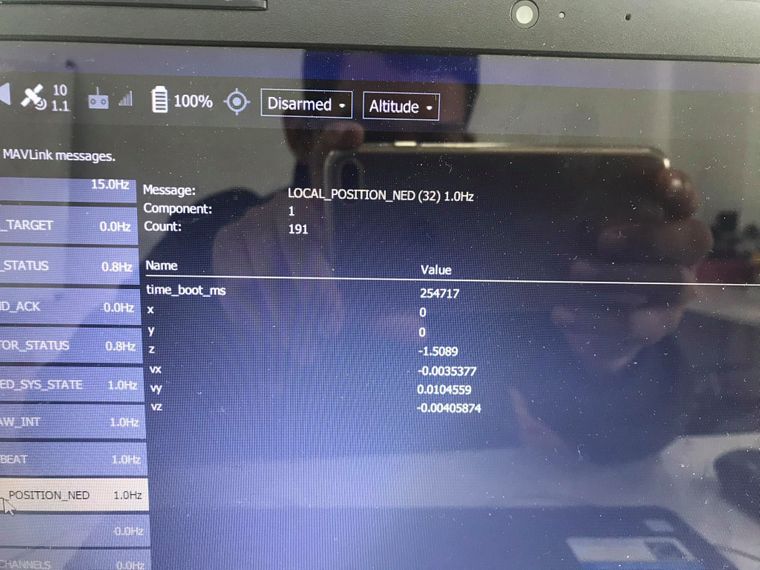
M500 driff when flying VIO indoor navigation.Hello, as the topic name when I starting to fly indoor nav with M500 VOXL frame, the UAV not go up straight but driff to the left side or right side (randomly). I also checking the Local_position_NED is 0,0,0 before the flight.
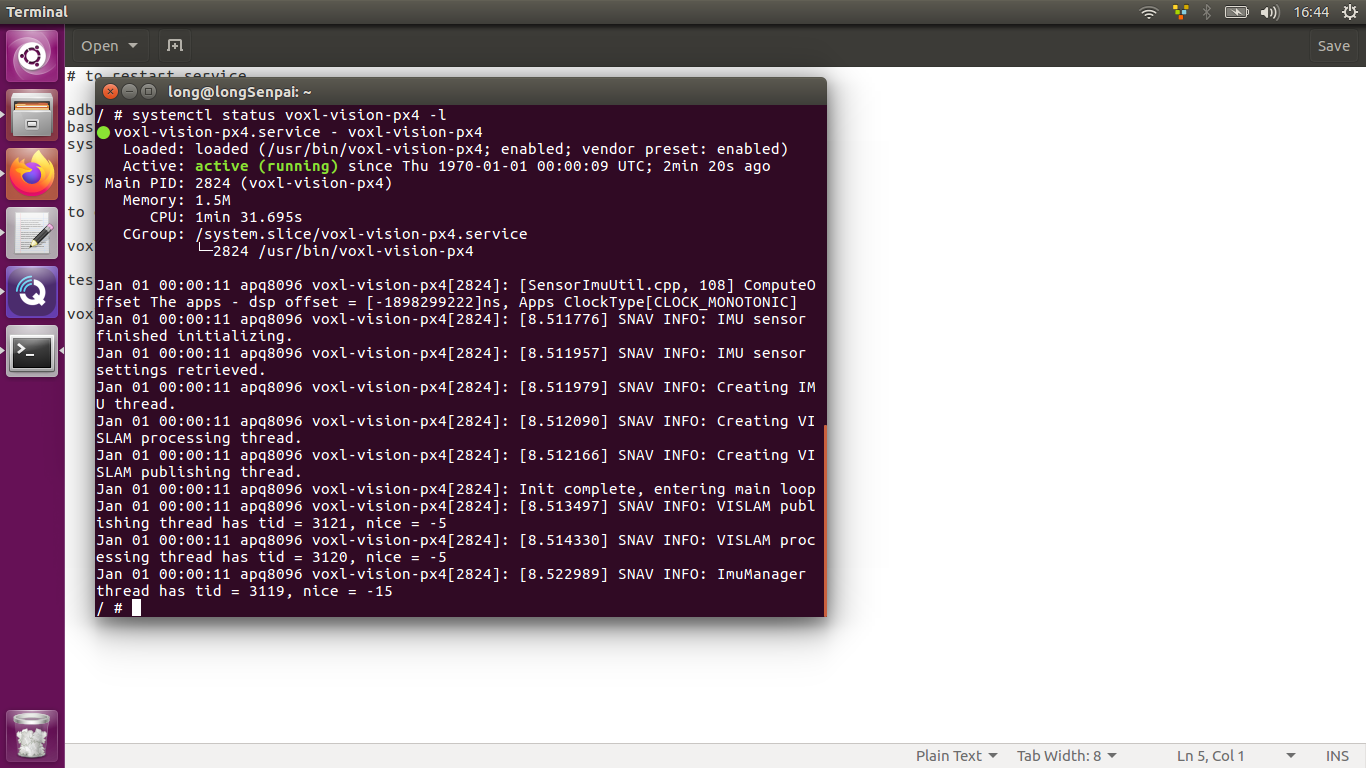
Here is the "systemctl status voxl-vision-px4"
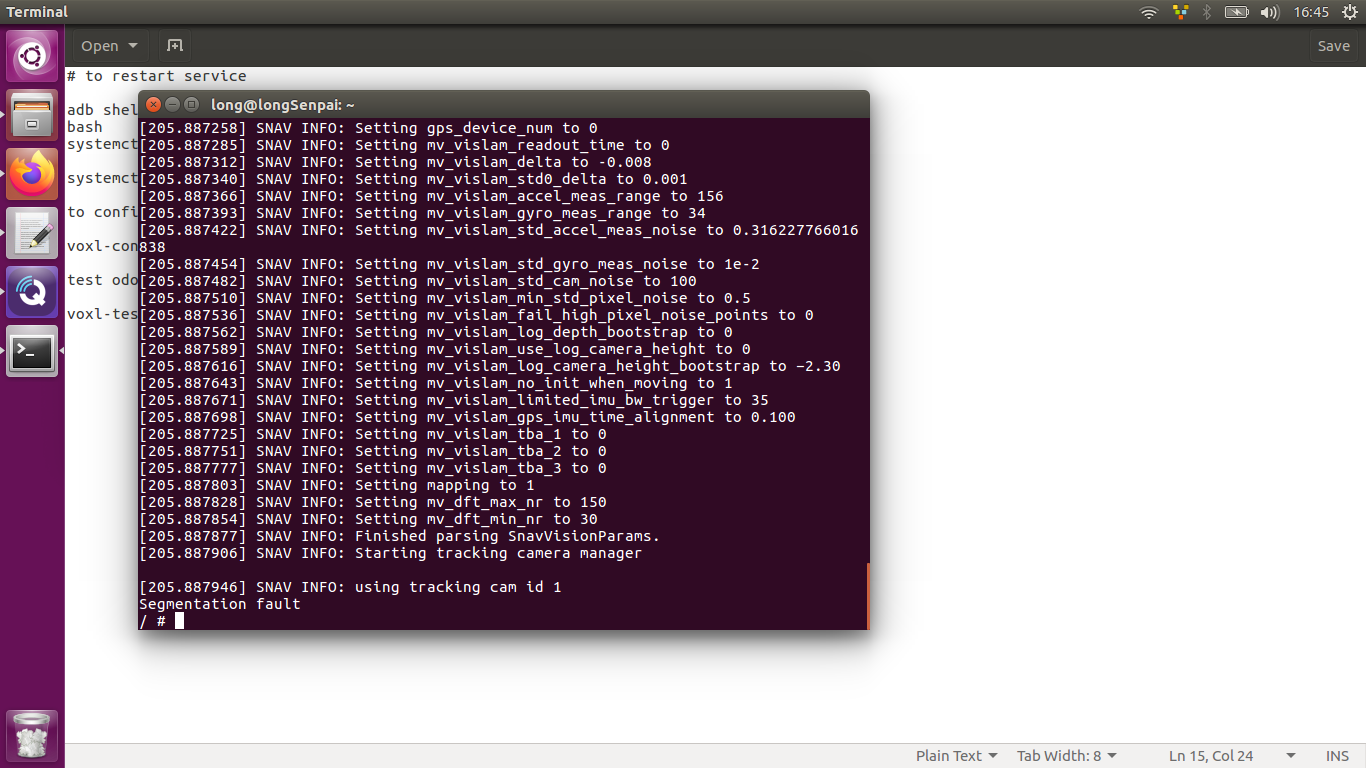
and when i test the odometry with "voxl-test-vision-lib -o"
pls give me some advice. -
Help! lossing data from camera + IMU trackingProblem Solved. for anyone in the future have similar case just perform factory configuration for VOXL Flight Deck by
"voxl-configure-vision-px4 -f" and then re-connect to QGC and you will see the miracle. -
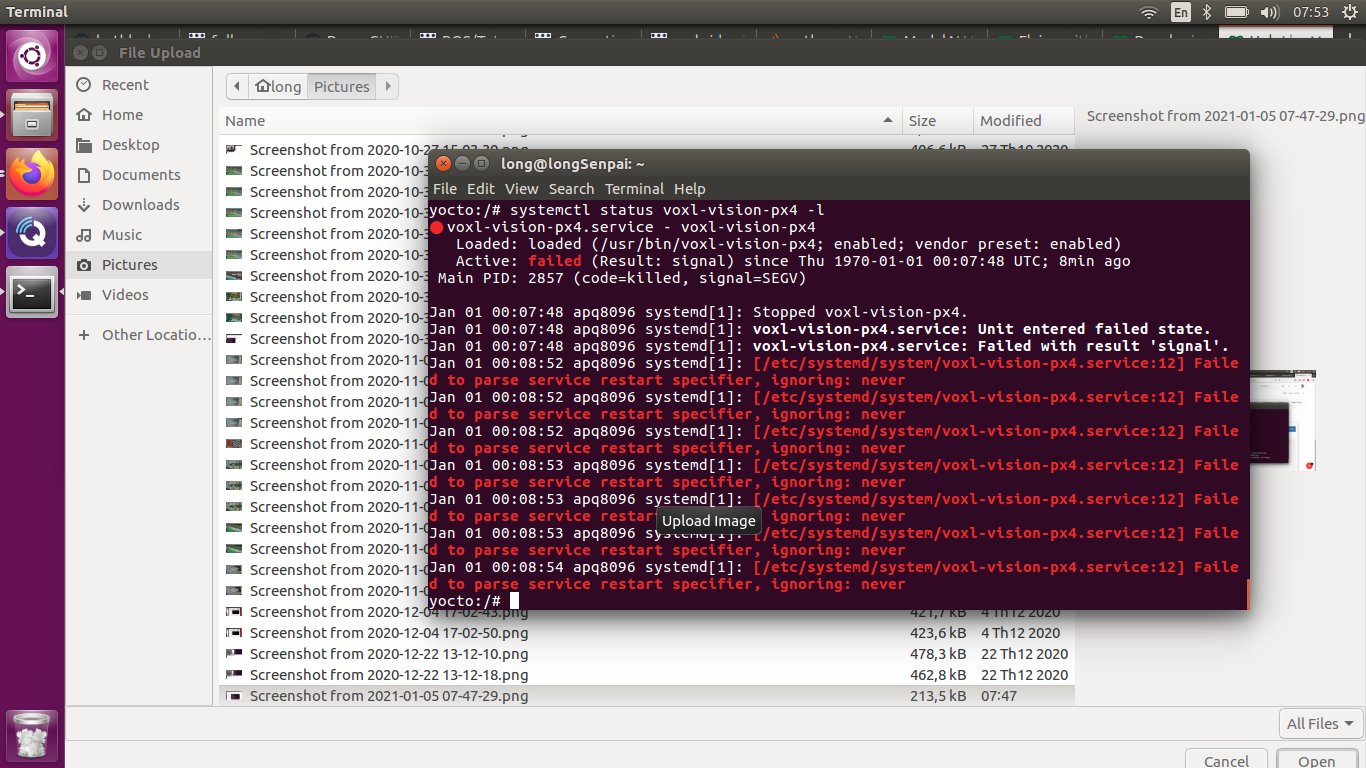
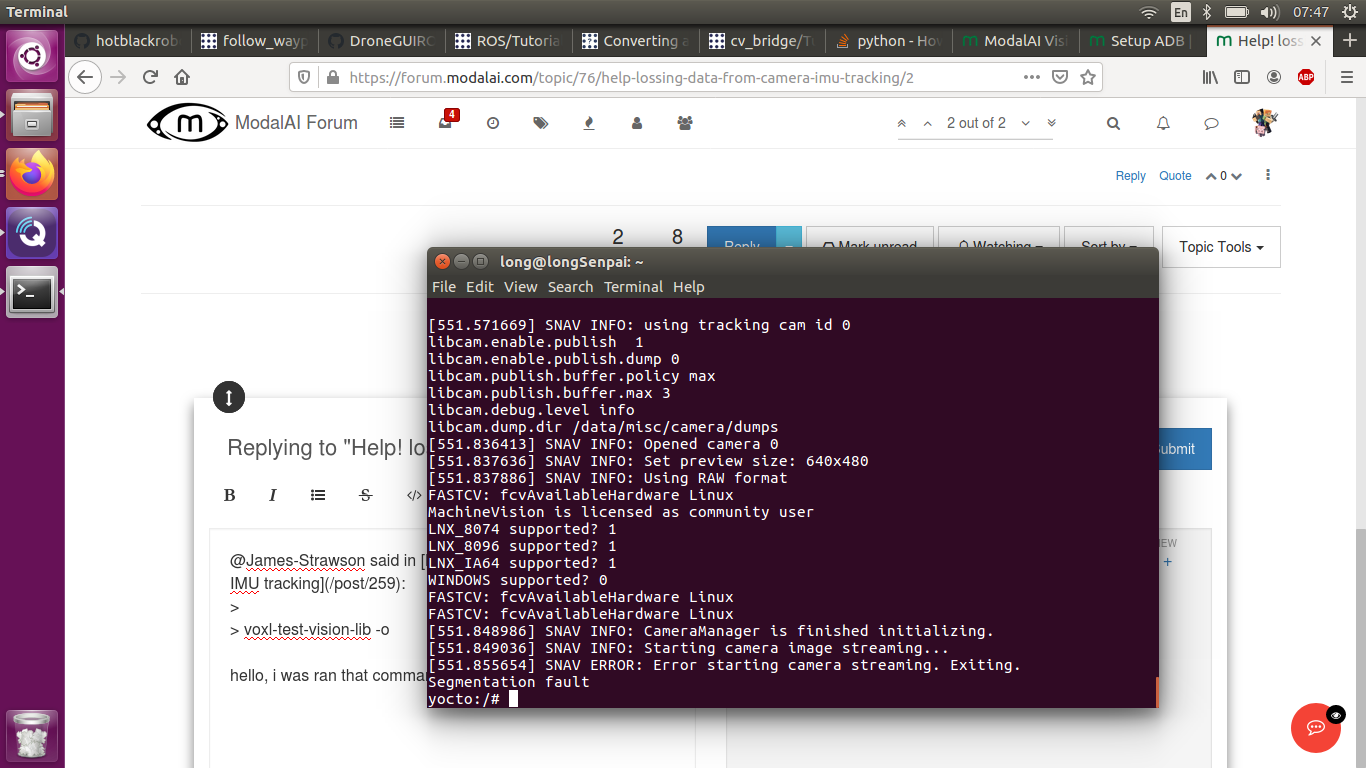
Help! lossing data from camera + IMU tracking@Vũ-Văn-Long and after i run command check the status
-
Help! lossing data from camera + IMU tracking@James-Strawson said in Help! lossing data from camera + IMU tracking:
voxl-test-vision-lib -o
hello, i was ran that command and it's have an error.
-
Help! lossing data from camera + IMU trackingHello, im working with m500 drone. when i starting with ROS, i was calibration camera here. after that m500 cannot display the value of x,y in NED position in QGC (just remain Z value). after reading document i think the SNAV was reset after i ran config command. it's right?
Then the solution is recalib the Modalai Visio Lib at here? but what is the selection for IMU and tracking camera? Please confirm if i miss anything.
-
VOXL M500 with ROS@Chad-Sweet hi. i am reading mavros document now. Thank for your guide.
-
VOXL M500 with ROSHello modalai team, i'm a customer of voxlm500 products and currently i want to uss voxl m500 with ROS. My goal is publish all the parameter which is the local position NED of drone into ROS and i can subscriber those params on mine PC. But i don't know how to take those params from? can you help me?
-
A question about VOXL_VISION_PX4hello development, i am a user of VOXL_m500 product and i'm trying to setup a first flight with deinided-GPS navigation feature. by default px4 will detect the location of UAV base on GPS, so in the case of m500 uav the operation environment will be indoor space. i know that it use odometry data frome the optical sensor to check uav location in space. i have a question that is how the px4 is accepted odometry data (or please give me some source code, i just want to ensure that the uav used odometry data instead the location from GPS. thank you so much !