Yes, those servers were disabled. The QVIO server was running. You can download the log here.
please note the modified info.json file which was used to replay only the IMU and the camera data.
V
VictorT
@VictorT
Posts
-
voxl-replay repeatability -
voxl-replay repeatabilityHi,
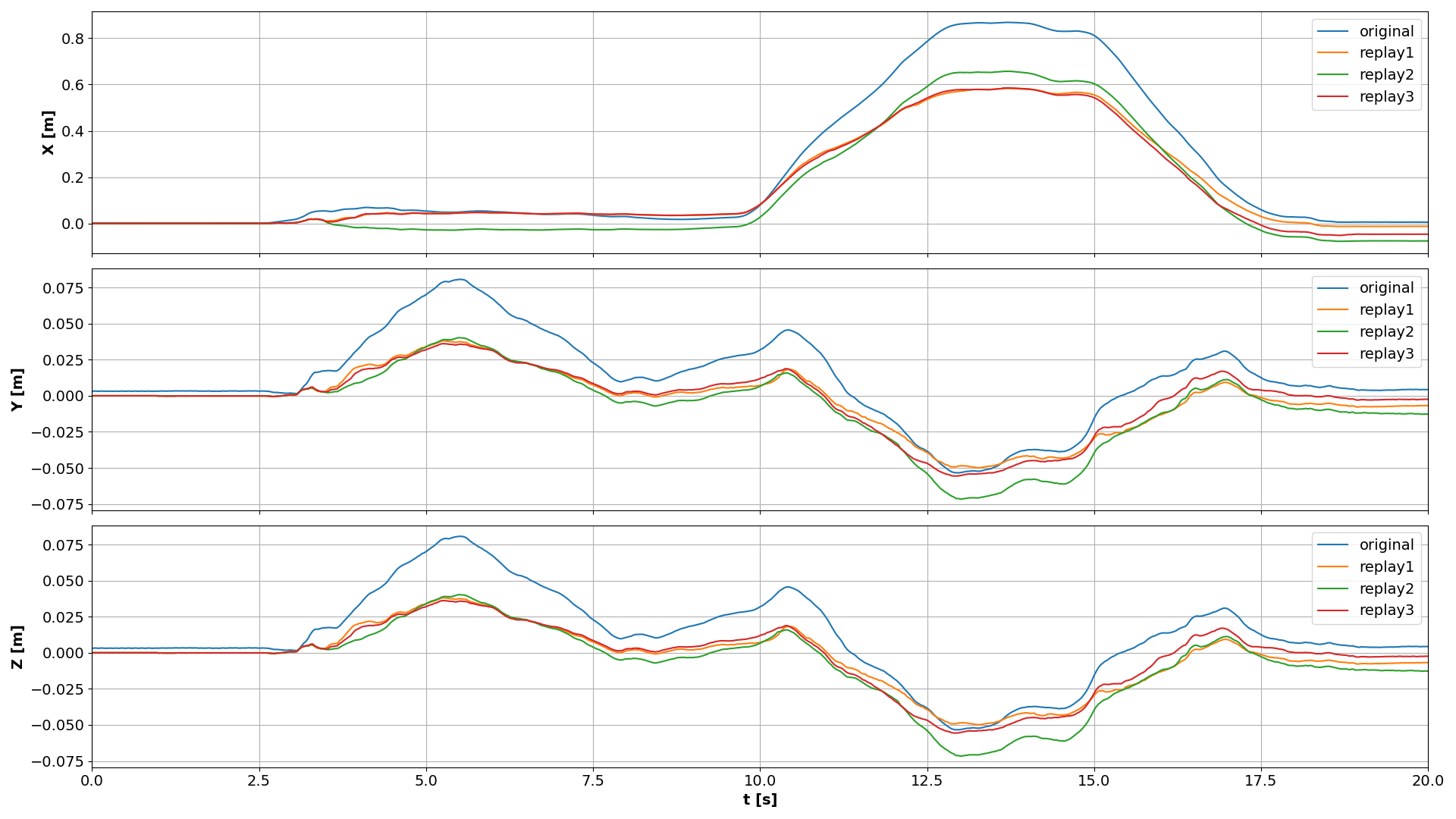
By replaying the voxl-logger log, I am trying to recreate QVIO behavior. However, the QVIO output appears to differ from the original log. Additionally, replaying the same log several times does not result in the same QVIO output (see attached plot). I guess this is due to the different initial state of the QVIO at every replay (before the voxl-replay begins). Would it be possible to force QVIO to perform independently at each log replay, and more importantly, to perform identically to the original log?I am using voxl2
in order to obtain logs and replay them I am using the following comands:
for logging:
voxl-logger -o -t 30 --note log_for_replay_test
for replay:
I am modifing info.json to include only two channels (IMU and tracking)
voxl-logger -o -t 35
voxl-replay -n 0 -y
-
Conversion of ToF Depth Images to DistanceGreat news!
I had an older version without ToF Logging
Thanks -
Conversion of ToF Depth Images to DistanceHi,
As far as I understand, the logger does not yet support the logging of point clouds. I was able to log the ToF depth images. Could those images be converted to distance values? To put it another way, what is the relationship between the grayscale value of a pixel to its distance?
I am using this ToF sensor on Voxl Flight
Thanks! -
Poor quality of stereo-camera calibration@VictorT said in Poor quality of stereo-camera calibration:
Qualcomm Flight Pro Development Kit
@Dobry-Kolacz thank you for the quick response,
The cameras are clean and focused. The M0015-1 cameras, however, have greater distortion near the edges than Qualcomm Flight Pro Development Kit cameras. -
Poor quality of stereo-camera calibrationHi,
I am trying to calibrate stereo vision on two different systems. The first system is the Qualcomm Flight Pro Development Kit, while the second is the VOXL Flight equipped with an M0015-1 VOXL stereo sensor. The first system passes the calibration process quickly with reasonable re-projection errors. However, the re-projection errors of the second system are very high (~0.45 for both intrinsic and extrinsic) and the disparity map is very poor. Why are the errors on M0015-1 so high? It seems that those are almost identical cameras. The calibration target (8x6 40mm Checkerboard) and lighting conditions are the same.