V
valvarez
@valvarez
Posts
-
Ghost atto Sentinel -
VOXL-ESC (output) + VOXL IO (output)Hello everyone.
Is it possible to use the ESC that comes by default in the SENTINEL and at the same time the IO Board to connect a deploy servo?
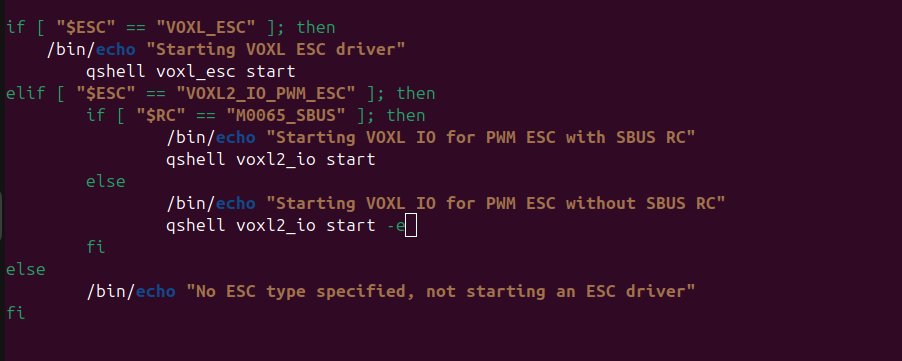
When I put ESC=VOXL_ESC in the voxl-px4.conf the motors work but not the IO Board.
When I put ESC=VOXL2_IO_PWM_ESC the motors do not work but there is a connection with the IO Board (at least the connection).
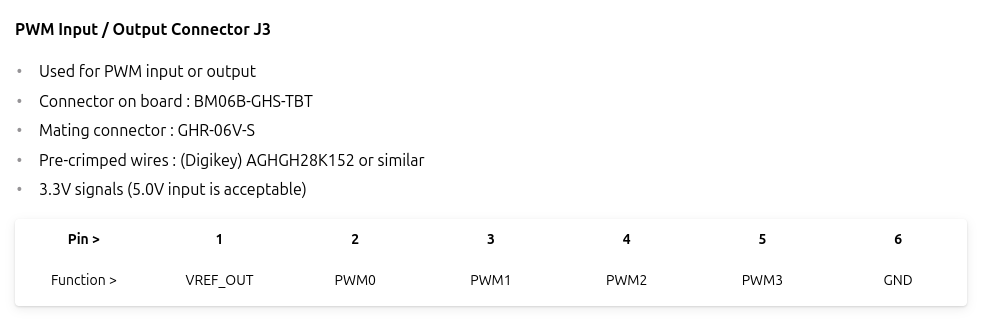
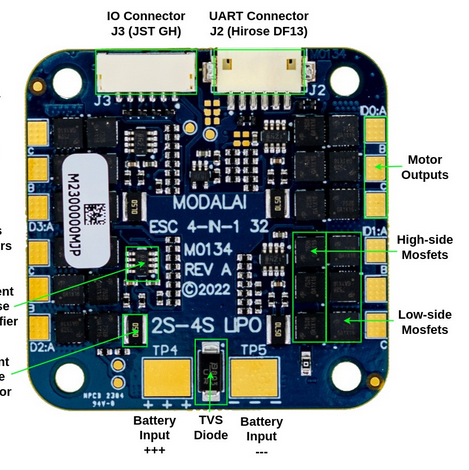
Is there no way to have the drone motors act through J18 on the VOXL 2 and the servos output through J19 on the IO Board?If it is not possible I see that the VOXL 4 in 1 ESC has a connector (J3) with PWM input and output. Is it possible to use it?
If it is not possible either, having the SENTINEL HARDWARE, how is it possible to install a servo or any deployment device to be commanded from MAVSDK?
First of all, I apologize for how active I have been in the forum, and I appreciate the answers you have given me, but it is a bit urgent for me and I am facing some adversities.
Thank you so much. -
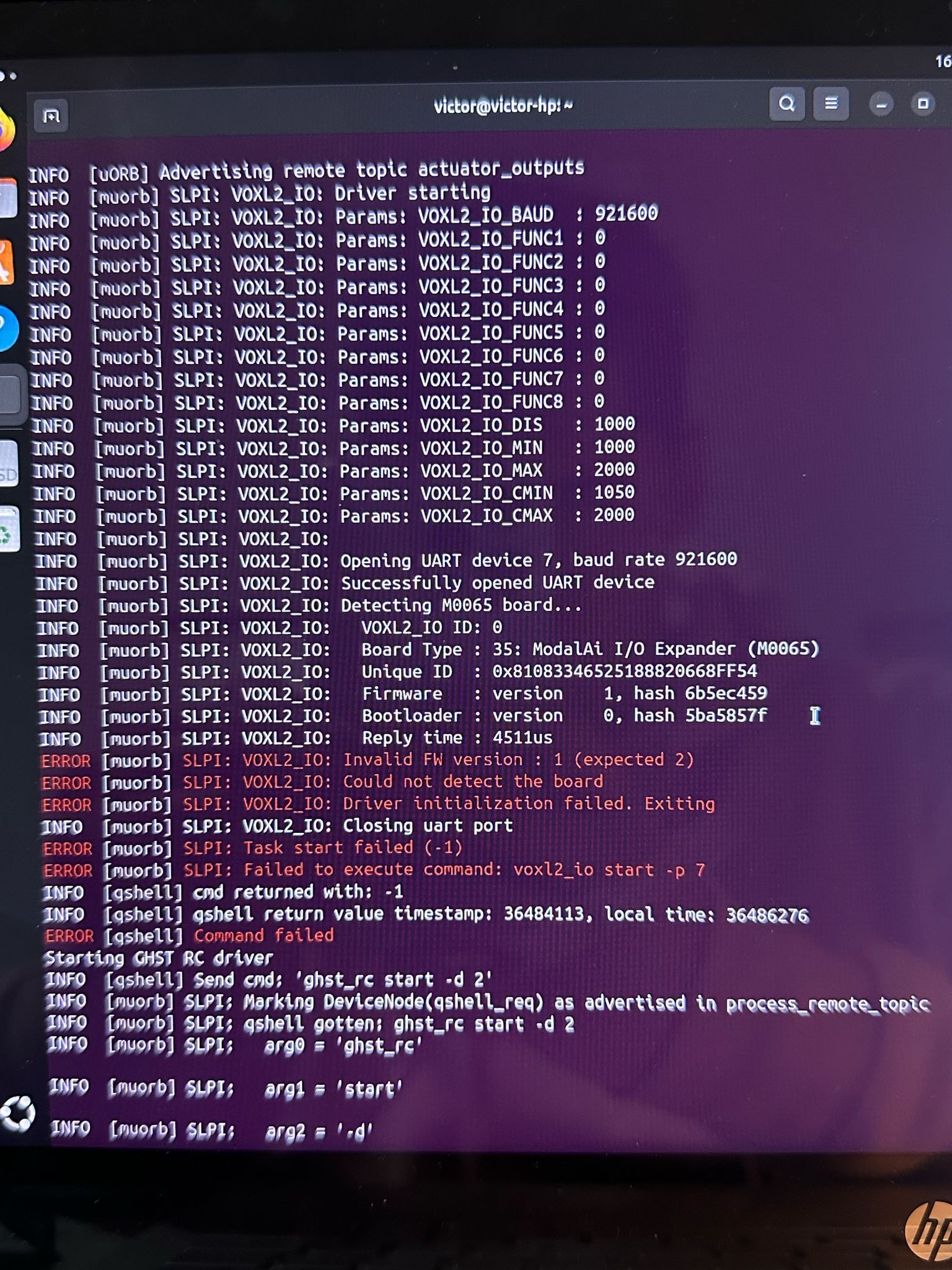
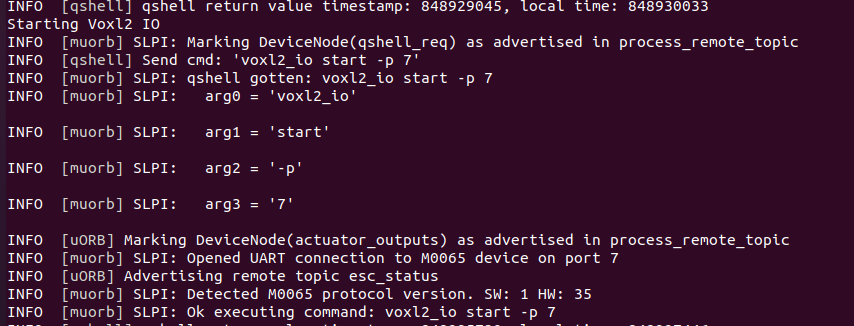
VOXL 2 IO Board troubleshooting - Driver will not start@valvarez UPDATE 2: With that firmware is working: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl2-io/-/blob/master/voxl2-io-tools/firmware/modalai_m0065_firmware_v0_2_RC1_f94baad1.bin

-
VOXL 2 IO Board troubleshooting - Driver will not start@valvarez UPDATE: I took another IOBoard and connected it to see what happened. To my surprise, it has shown something different. After updating it, I get the same thing as with the other one. The firmware that im using is voxl2_io_firmware_m0065_v1_35_58c82813.bin from https://developer.modalai.com/asset/7
-
Ghost atto Sentinel@Eric-Katzfey How should I redirect it? From what you have told me in other threads, my interpretation says that right now it is pointing to slpi-uart-7. Would it just be a matter of changing the 7?
Edit: In my head it sounded simpler
-
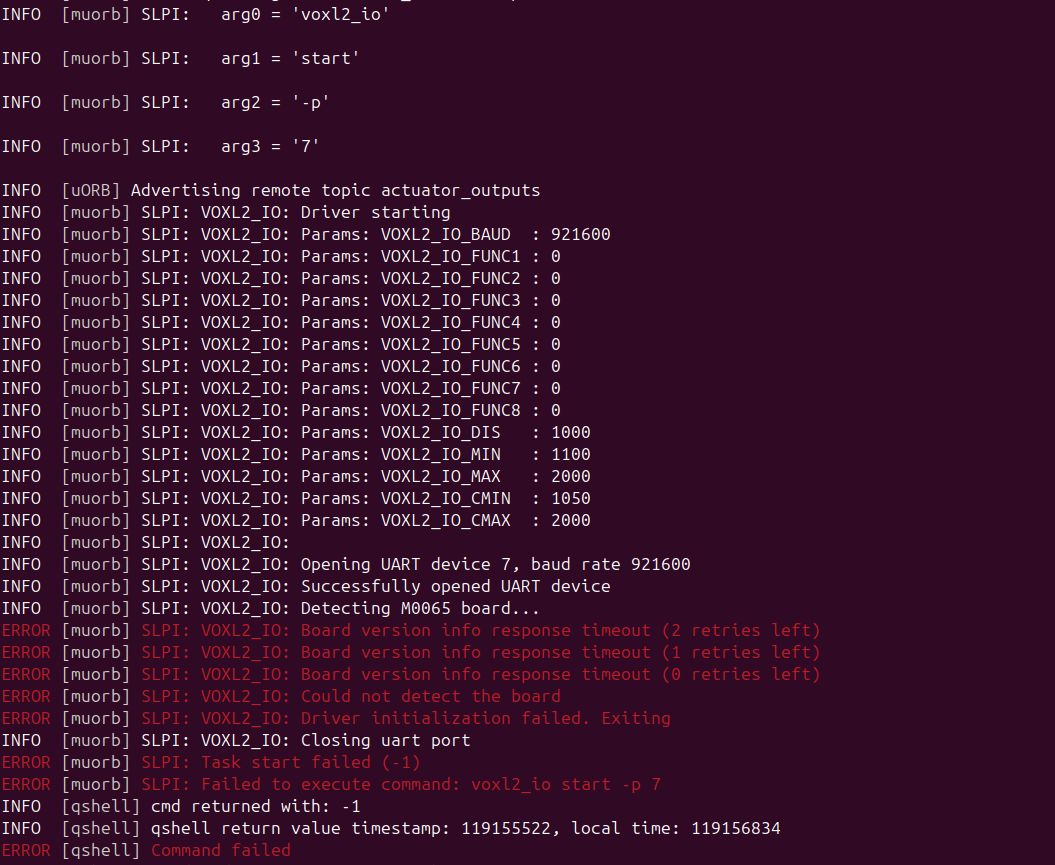
VOXL 2 IO Board troubleshooting - Driver will not start@Eric-Katzfey Replaced it with -p 7
-
VOXL 2 IO Board troubleshooting - Driver will not start@Jeremy-Frederick said in VOXL 2 IO Board troubleshooting - Driver will not start:
@Eric-Katzfey I'm not looking to run RC through the IO board, I'm using external RC commands for control. I'm looking to utilize the PWM outputs on the board to control a servo for a dropper mechanism. I made the change and am commanding the start of the voxl2_io driver successfully. As of now I am still unable to drive a servo through the QGC actuators tab, all the correct parameters have been loaded.
Hello @Jeremy-Frederick
Do you remember how you made that change? I can't find a way to change the port
-
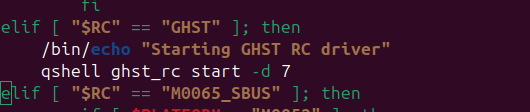
Ghost atto SentinelHello everyone.
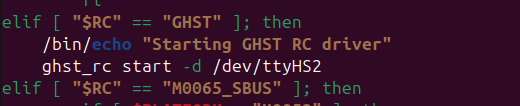
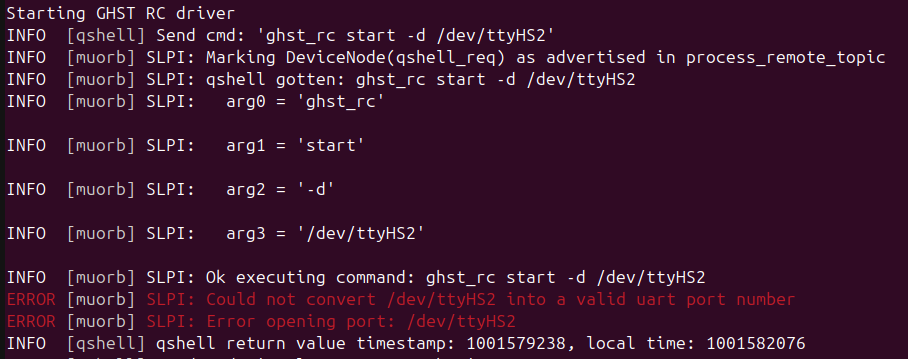
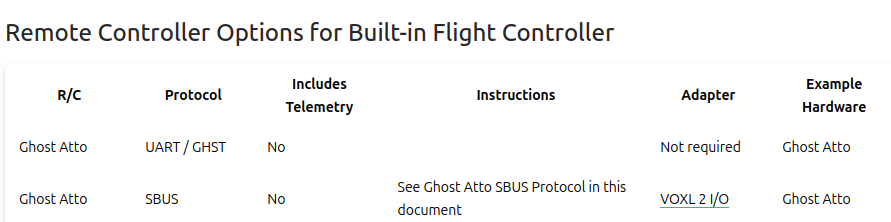
I need to release the RC UART on J19 (Ghost atto of the Sentinel) to connect an IO Board. Can the Ghost atto be SBUS and UART at the same time or are they different devices?
If it is SBUS I know that I could connect it to J3 of the IO Board, but if it is UART, could it go in the ttyHS2 for example?Thank
-
Connect the VOXL 2 I/O using the UART port on the 5G modem@Eric-Katzfey In my case I am receiving data as @Alex-Kushleyev explains with
stty -F /dev/ttyHS2 115200 cat /dev/ttyHS2
and in the script in /usr/bin/voxl-px4-start I see that section @Eric-Katzfey
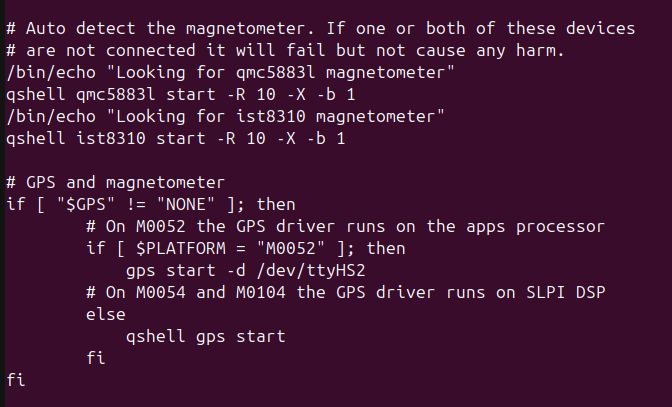
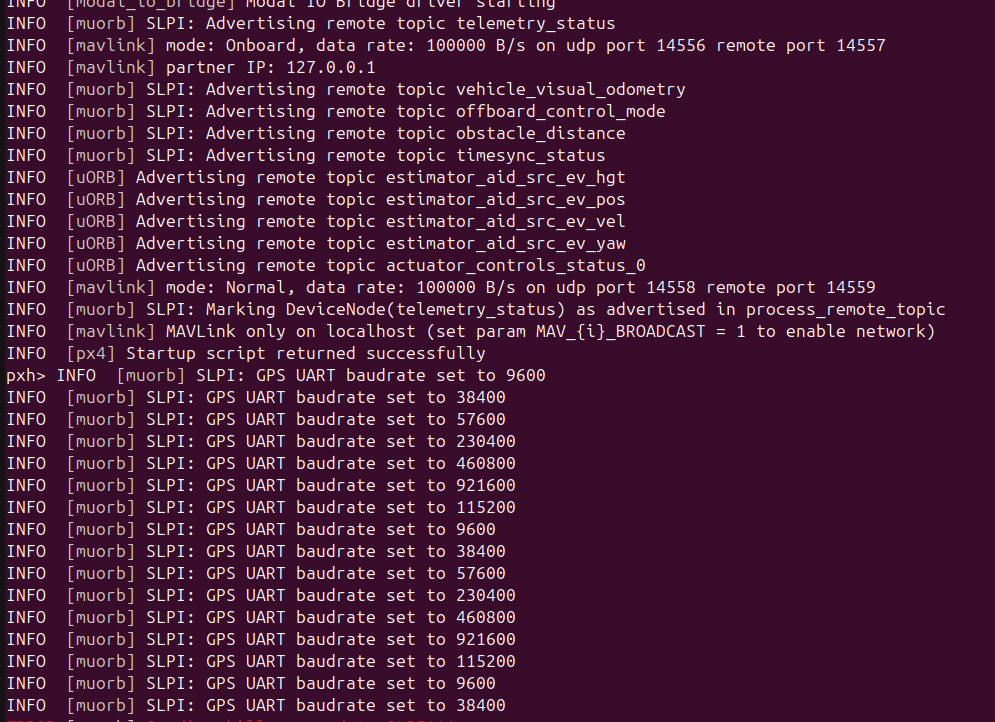
but when it comes to running voxl-px4 it autodetects with different bauds to the GPS. Is it necessary to change it somewhere else?
I have no problems with the MAG. It detects it perfectly.
I have the RX and TX of the GPS connected exclusively to the J9 of the 5G, and the rest, to the J19.I also have the RX and TX of the IO Board connected to the RX and TX of the J19.
I have also tried disconnecting the IO Board and leaving only the GPS on the J9.SOLVED: I change in the file voxl-px4-start from M0052 to M0054. Thanks!!!
-
PWM Servo IO Board@modaltb
Hello.
I have tried this command following what you mentioned and it doesn't work.
Is there anything special I have to try?
Is it possible to connect the IO Board to the UART /dev/ttyHS2 taking this into account in the firmware update bash script?


-
Starling 2 - Voxl-dfs-server@valvarez Is there a way to change it manually in code?
-
Starling 2 - Voxl-dfs-serverHello everyone.
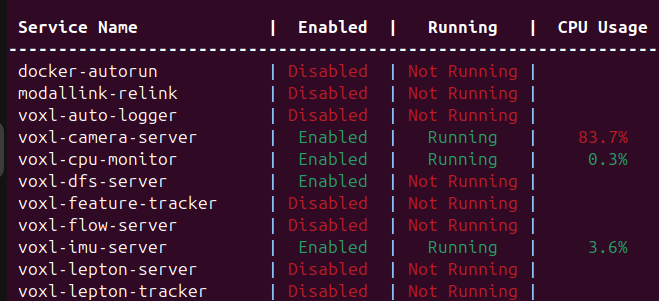
I'm configuring a Starling 2, which I can't get to be able to detect obstacles. When I activate the voxl-dfs-server service I see that it is active but not running.
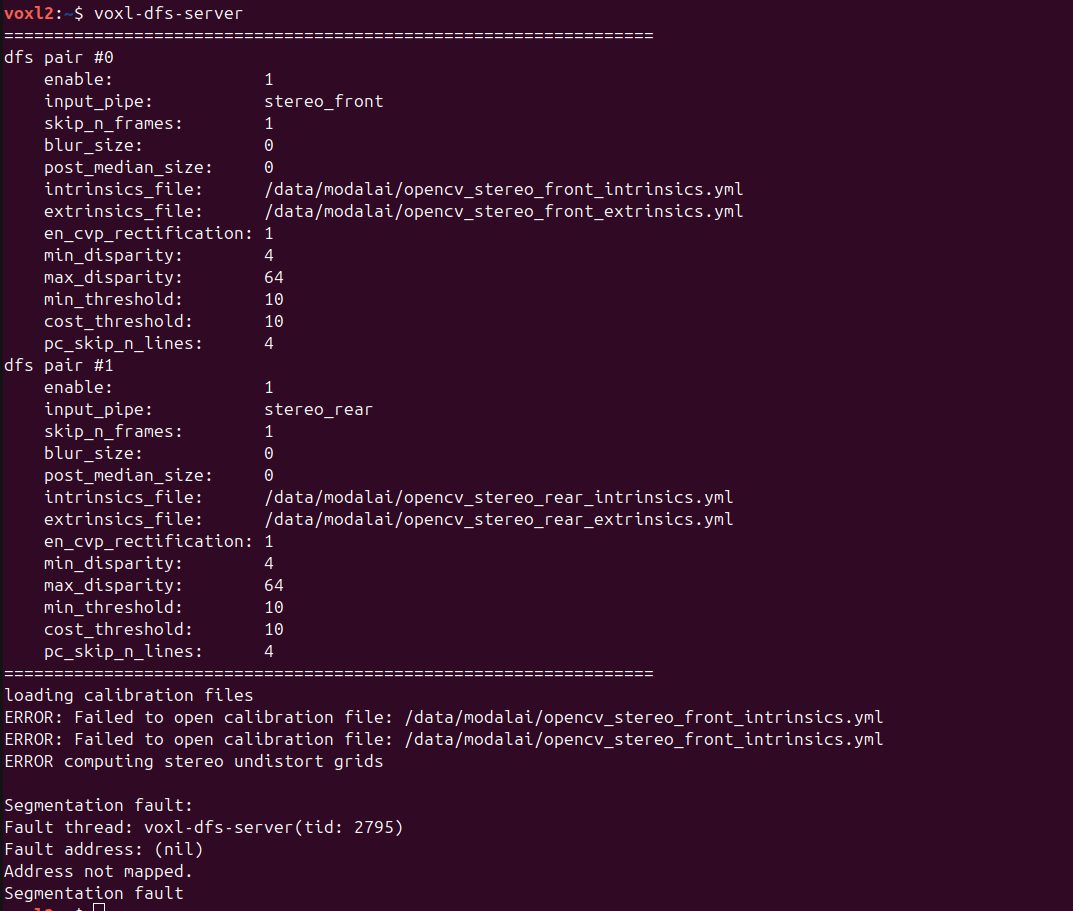
When I access the service, I see this:
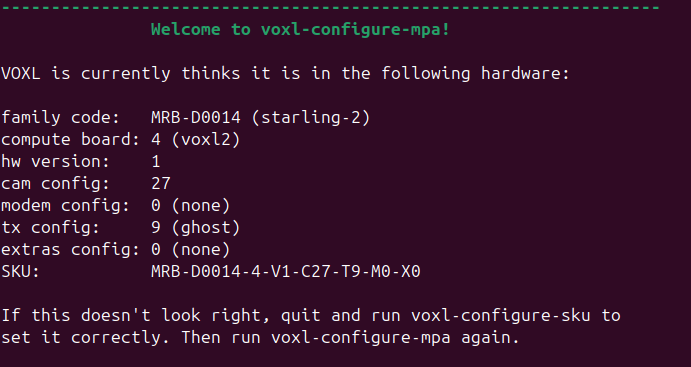
When running the voxl-configure-mpa command I get this:
And the list of available pipes are:
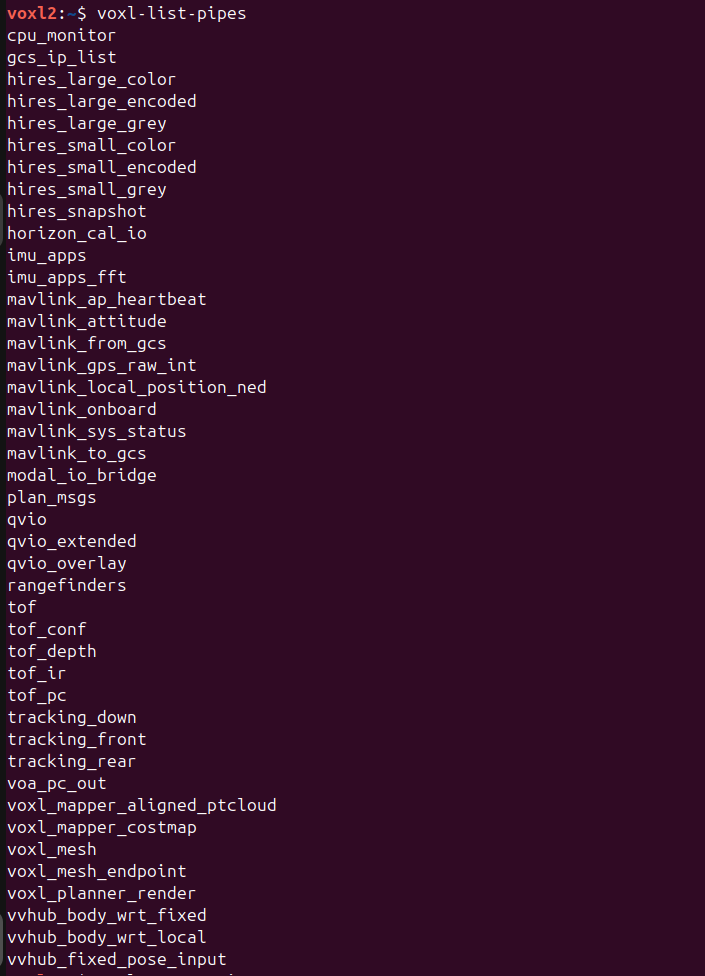
I understand that the voxl-dfs-server is looking for the stereo_rear and stereo_front cameras, but the Starling does not have them - the ones I understand it has are Tracking_front, rear and down.
How can I change that setting? How can I make Starling 2 avoid obstacles?Thank you so much
-
PWM Servo IO Board -
PWM Servo IO Board@modaltb I don't think what you're telling me is useful to me, or I haven't understood you correctly.
That connector that you tell me is occupied by the M0090 -5g Add-on board, since it is a Sentinel with 5G.
My question is if there is a connector in that add-on to put the GPS and thus free up the VOXL connector where the IO Board will be connected. -
PWM Servo IO Board@Eric-Katzfey I already understood what you mean. What if that connector to which we connect the board that exposes the UART is occupied by the Sierra 5G Modem?
https://www.modalai.com/products/mdk-m0090?variant=40594936463411
I see in the datasheet that the J9 connector is a UART/i2c. Could the GPS be connected here to free it from the VOXL 2?
I'm starting to see the light...
Thanks @Eric-Katzfey
-
PWM Servo IO Board@Eric-Katzfey said in PWM Servo IO Board:
@valvarez The IO board was created to allow builders of custom drones who need to use PWM ESCs and / or SBUS RC units to be able to connect to a VOXL 2 which has neither PWM nor the ability to configure UARTs for SBUS. So, for example, if you wanted to use PWM ESCs instead of our UART based ESC then you would attach the IO board to the UART that normally is connected to the ESC. Or, for RC, you would connect (as in that diagram) to the UART that normally is connected to an RC receiver. If you still want to use our ESC, the current RC and GPS then you don't have a spare UART for the IO board. One possible way to do this would be to move the GPS from it's current connector to a UART on the applications processor side and then attach the IO board to the UART that has the GPS now. This would require an add-on board that exposes such a UART.
Understood. And could you give me the reference of the add-on board to expose that UART?
-
PWM Servo IO Board@Eric-Katzfey I think it has to do with this: https://forum.modalai.com/topic/1826/voxl-2-i-o-and-gps
Is it possible to connect the IO Board in parallel with the GPS connection? -
PWM Servo IO Board@Eric-Katzfey First of all, thank you for your patience.
My intention is to be able to connect a servo that allows a load to be released during the flight based on a signal sent by the VOXL itself (we will be connected to the drone through MAVLINK)
Seeing that there was no possibility of connecting a servo to the VOXL, I purchased the IO Board, to which I would connect the servo.
The thing is that when I see the connection diagram of the IO Board, I see that it is connected to a connector already used in the VOXL.
Is there any option that the device that is connected to the IO Board location can be connected to the IO Board, maintaining the option of using the RC that is supplied with the Sentinel and having the extra of being able to connect a deployment servo?Or failing that, if I wanted to send a signal through Mavlink to be able to release a load through a servo, what would the operation be like?
Thank you so much
-
PWM Servo IO Board@Eric-Katzfey Thank you very much for the response. The kit I have purchased is the most complete one here: https://www.modalai.com/products/voxl2-io?variant=40905411035187
Would what you mention be possible with this hardware?