Connect the VOXL 2 I/O using the UART port on the 5G modem
-
@Alex-Kushleyev But the RTK corrections come in when I connect the RTK to the 5G modem over J9. What do you think makes a difference here?
@SMRazaRizvi When you connect the GPS to J9, you start the GPS driver on the cpu side, so there is probably nothing that filters out the mavlink messages with corrections between the rtk mavlink service and your gps driver.
When starting GPS driver on the DSP, there may be a filter somewhere that prevents the rtk corrections mavlink message from reaching the DSP.
That is my guess
-
@SMRazaRizvi When you connect the GPS to J9, you start the GPS driver on the cpu side, so there is probably nothing that filters out the mavlink messages with corrections between the rtk mavlink service and your gps driver.
When starting GPS driver on the DSP, there may be a filter somewhere that prevents the rtk corrections mavlink message from reaching the DSP.
That is my guess
@Alex-Kushleyev I see.
I'll try to splice the connection for GND, SDA, and SCL and connect them to the J19 on VOXL2.In this case, should the GND, SDA, and SCL pins be connected to both the J9 on the 5G modem and the J19, or just to the J19?
-
@Alex-Kushleyev I see.
I'll try to splice the connection for GND, SDA, and SCL and connect them to the J19 on VOXL2.In this case, should the GND, SDA, and SCL pins be connected to both the J9 on the 5G modem and the J19, or just to the J19?
@SMRazaRizvi just J19 for gnd, sda and scl.
Then you still have gnd, 3.3V, rx, tx going to GPS.
-
@SMRazaRizvi just J19 for gnd, sda and scl.
Then you still have gnd, 3.3V, rx, tx going to GPS.
@Alex-Kushleyev Works like a magic!!
Thank you so much")
-
@Alex-Kushleyev Works like a magic!!
Thank you so much@SMRazaRizvi awesome..
I want to look into why running the GPS driver on the DSP did not result in RTK corrections getting through.. This would simplify your setup.
Can you please help me by telling me the topic name that is published by the RTK (rtcm) publishing app? I think it is just not going through to the DSP (being filtered out) for some reason. Also, just curious what app are you using to publish the mavlink messages with RTK (rtcm) corrections?
Alex
-
@SMRazaRizvi awesome..
I want to look into why running the GPS driver on the DSP did not result in RTK corrections getting through.. This would simplify your setup.
Can you please help me by telling me the topic name that is published by the RTK (rtcm) publishing app? I think it is just not going through to the DSP (being filtered out) for some reason. Also, just curious what app are you using to publish the mavlink messages with RTK (rtcm) corrections?
Alex
@Alex-Kushleyev Sure.
But currently, I've crashed my drone after it suddenly flipped 180 roll, and crashed on the ground while I was flying.
For some Here's the log:
Can you see what's the issue here?
-
@Alex-Kushleyev Sure.
But currently, I've crashed my drone after it suddenly flipped 180 roll, and crashed on the ground while I was flying.
For some Here's the log:
Can you see what's the issue here?
I took a quick look, at the very end it looks like motor 2 (green) was commanded zero output
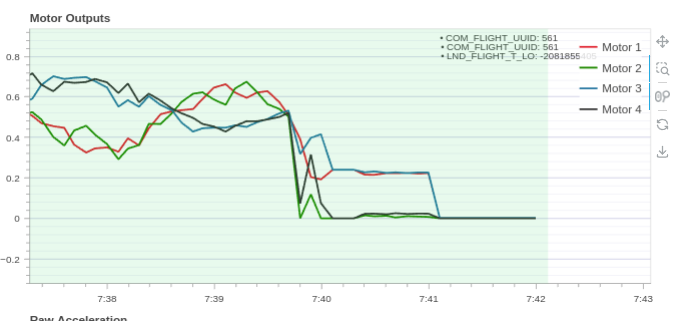
If the PWM range on VOXL2_IO is not calibrated properly, if the mixer is outputting zero, it could result in VOXL2_IO commanding low enough PWM to motor that can cause it to stop.
Can you please let me know if your motors are spinning right after you arm the vehicle (but before you raise the thrust), or they spin up only after you arm AND then raise the throttle stick?
-
I took a quick look, at the very end it looks like motor 2 (green) was commanded zero output
If the PWM range on VOXL2_IO is not calibrated properly, if the mixer is outputting zero, it could result in VOXL2_IO commanding low enough PWM to motor that can cause it to stop.
Can you please let me know if your motors are spinning right after you arm the vehicle (but before you raise the thrust), or they spin up only after you arm AND then raise the throttle stick?
@Alex-Kushleyev The motors were all working fine since the start. I flew the drone for a while actually and then it suddenly crashed.
-
@Alex-Kushleyev The motors were all working fine since the start. I flew the drone for a while actually and then it suddenly crashed.
@SMRazaRizvi , As I mentioned in my previous post, the plot shows that for some reason there was a command for Motor 2 to go to zero (which would convert to the minimum PWM value of 1000). Do you remember if you have performed some aggressive maneuver at the end, which would trigger this?
Also, can you please perform acuator test using GCS and figure out at which actuator output value, your motors actually spin up?
-
@SMRazaRizvi We have not integrated an RTK GPS receiver before so cannot comment on the steps needed to get it working properly. Perhaps the manufacturer of the RTK GPS unit can provide some guidance on how to use it with PX4? Or the PX4 community? But if you are seeing valid data from the unit then at least the hardware seems to be connected properly.
@Eric-Katzfey In my case I am receiving data as @Alex-Kushleyev explains with
stty -F /dev/ttyHS2 115200 cat /dev/ttyHS2
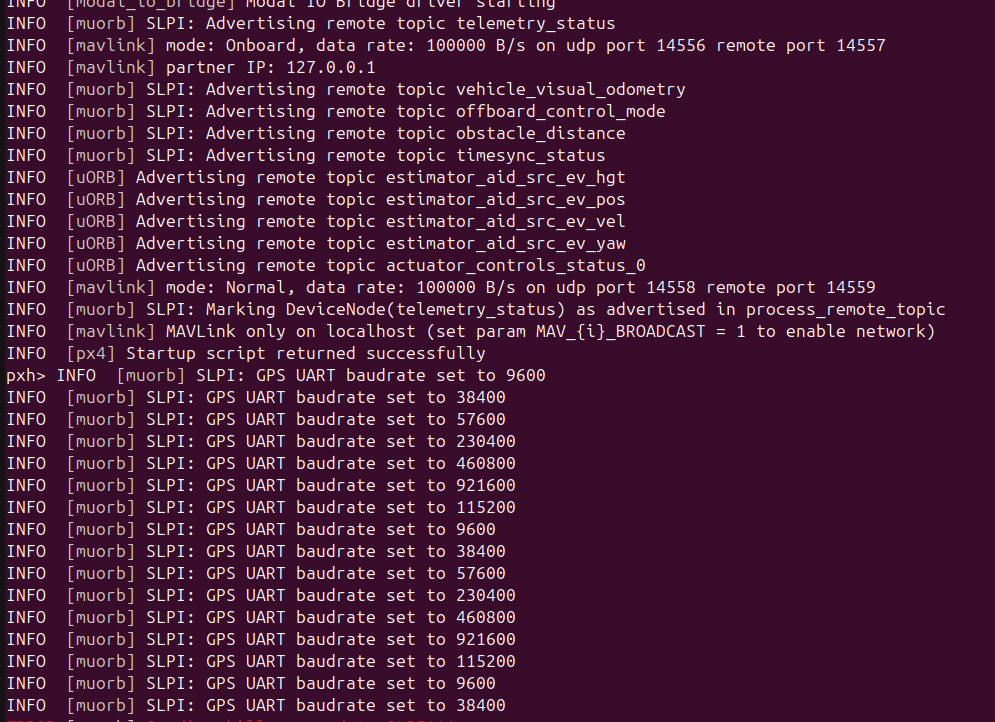
and in the script in /usr/bin/voxl-px4-start I see that section @Eric-Katzfey
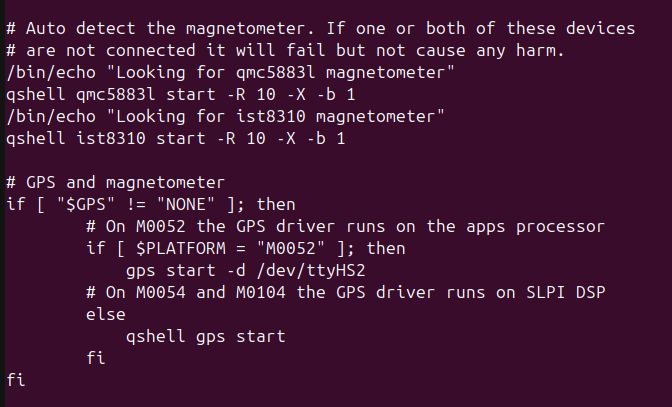
but when it comes to running voxl-px4 it autodetects with different bauds to the GPS. Is it necessary to change it somewhere else?
I have no problems with the MAG. It detects it perfectly.
I have the RX and TX of the GPS connected exclusively to the J9 of the 5G, and the rest, to the J19.I also have the RX and TX of the IO Board connected to the RX and TX of the J19.
I have also tried disconnecting the IO Board and leaving only the GPS on the J9.SOLVED: I change in the file voxl-px4-start from M0052 to M0054. Thanks!!!

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login