@Sam-Kiley
Correction on my statement above. Holybro Ultralight F9P seem to perform better due to their antenna setup (RCP Helical Antenna) rather than L2. L2 isn't fed into the NMEA like I originally thought.
Sam Kiley
@Sam Kiley
Posts
-
Starling 2 Max no GPS data -
Starling 2 Max no GPS data@Alex-Kushleyev
Was the source of this noise ever found?
My solution with the starlings was to just use the F9P ultralight, but those are also very expensive. They must just work well because of the L2 support, since L1 is almost fully being jammed by voxl2.Thanks
-
ArduPilot on Voxl2I am also messing around with Ardupilot on a fixed wing, and wondering if any sort of voxl-io conf is needed for passthrough the PWM and CRSF RC? in a previous SDK, I believe there was a voxl-io-server, which no longer exists in 1.5 SDK, from what I can tell.
I have upgraded the firmware and followed along with the rest of the thread.
Thanks for any info. -
Cannot use VOXL2 board-only with C-04 camera configOk thanks, I will select "0" here:

and just for my understanding, every starling 2 and starling 2 max has that M0173 board inside of it? I thought I looked at the drones to check this, but didn't notice it I guess.
Thanks for this info.
Although I will probably start a new thread, would this config affect the use of the VOXL-io board. I am trying to use voxl-ardupilot + voxl-io on J4, but its not detected via voxl-2-io
Thanks
-
Cannot use VOXL2 board-only with C-04 camera configI am trying to setup a VOXL2 board with the C-04 camera config shown here:
https://docs.modalai.com/voxl2-camera-configs/#c-06-tof-hires-and-tracking-d0005-starlingI flashed a newer version of voxl sdk and setup as VOXL2-board only as shown below:
────────────────────────────────────────────────────────────────────────────────
system-image: 1.8.02-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125
────────────────────────────────────────────────────────────────────────────────
hw platform: M0054
mach.var: 1.0.1
SKU: MCCA-M0054-CC-T0-M0-X0
────────────────────────────────────────────────────────────────────────────────
voxl-suite: 1.4.5Trying to follow the guide, the first issue I see is that voxl-configure-cameras only gives me the following options:
26 - M0173 Starling 2 IMX412 + dual AR0144
27 - M0173 Starling 2 PMD IMX412 triple AR0144
28 - M0173 Starling 2 Max dual IMX412 + dual AR0144
29 - M0173 Starling 2 Max PMD + dual IMX412 + dual AR0144
30 - M0173 Starling 2 Prototype dual PMD + dual IMX412 + dual AR0144
36 - M0173 Seeker V5+ IMX412 + dual AR0144
37 - M0173 Seeker V5+ IMX412 + dual AR0144 + Boson
46 - M0173 Seeker V5+ IMX664 + dual AR0144
47 - M0173 Seeker V5+ IMX664 + dual AR0144 + Boson
I just did C for custom configGiven this, I started trying to manually follow the others guides and adding the binaries manually and using config helper:
https://docs.modalai.com/voxl2-image-sensors/I ran:
camera-server-config-helper tracking:ov7251:2 hires:imx214:3
cp /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_3.bin /usr/lib/camera/
cp /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_2.bin /usr/lib/camera/When I run voxl-camera-server -l I only see 1 camera detected, and it seems to be the ov7251, but then I then run the config helper with just he tracking cam, the voxl-camera-server still fails to start the camera. I am not in a place right now to swap cameras to see if its hardware, but just want to make sure I am doing the config and mapping correctly.
Especially since, when I look at the qrb5165-configure-camera script, the mapping from HWID to bin makes zero sense to me, especially for C-04:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-camera-server/-/blob/sdk-1.0.0/scripts/qrb5165-configure-cameras?ref_type=tagsAny input is appreciated. I think I had been thorough with your docs up until now, but still no luck.
-
Starling 2 Max with Ublox F9P UltralightI did wget from the voxl2 over wifi to get the package in / directory. dpkg -i on that results in this error:
voxl2:/$ dpkg -i voxl-mainline-px4_1.16.0-1.0.2-202505070835_arm64.deb
Selecting previously unselected package voxl-mainline-px4.
(Reading database ... 105523 files and directories currently installed.)
Preparing to unpack voxl-mainline-px4_1.16.0-1.0.2-202505070835_arm64.deb ...
Unpacking voxl-mainline-px4 (1.16.0-1.0.2-202505070835) ...
dpkg: error processing archive voxl-mainline-px4_1.16.0-1.0.2-202505070835_arm64.deb (--install):
trying to overwrite '/data/px4/etc/extras/actuators.json.xz', which is also in package voxl-px4 1.14.0-2.0.94
dpkg-deb (subprocess): decompressing archive member: lzma write error: Broken pipe
dpkg-deb (subprocess): cannot copy archive member from 'voxl-mainline-px4_1.16.0-1.0.2-202505070835_arm64.deb' to decompressor pipe: failed to write (Broken pipe)
dpkg-deb: error: <decompress> subprocess returned error exit status 2
Errors were encountered while processing:
voxl-mainline-px4_1.16.0-1.0.2-202505070835_arm64.debI currently have voxl-ardupilot and voxl-px4 stopped and disabled.
Any ideas on this?
-
Starling 2 Max with Ublox F9P UltralightEric, Thanks, yeah I suspected that it was some sort of version thing with px4 where they support it now.
Could you explain what the difference between mainline px4 and what I probably have loaded? or is it just because the VOXL SDK 1.4.1 is slightly behind?Thanks
-
Starling 2 Max with Ublox F9P UltralightI am using the Holybro F9P Ultralight with the starling 2 max but am not able to get gps data from the F9P. This is in relation to this post, trying to get around the self-jamming gps issue on the voxl2 with modem stack:
https://forum.modalai.com/topic/4226/starling-2-max-no-gps-data/44I have voxl-px4.conf GPS set to auto, so then it runs px4-qshell gps start.
When I look at the px4 logs, I see this being repeated:May 02 20:57:54 m0054 voxl-px4[1746]: INFO [muorb] SLPI: u-blox firmware version: HPG 1.51
May 02 20:57:54 m0054 voxl-px4[1746]: INFO [muorb] SLPI: u-blox protocol version: 27.50
May 02 20:57:54 m0054 voxl-px4[1746]: INFO [muorb] SLPI: u-blox module: ZED-F9P
May 02 20:57:54 m0054 voxl-px4[1746]: INFO [muorb] SLPI: GPS UART baudrate set to 115200
May 02 20:57:54 m0054 voxl-px4[1746]: INFO [muorb] SLPI: Got ack to initial CFG_VALSET!There is never outputted this line: (Which form other forum posts seems to indicate a real successful connection):
INFO [uORB] Advertising remote topic sensor_gpsAlso, my px4-listener sensor_gps says:
voxl2:/$ px4-listener sensor_gps
never publishedand then px4-qshell gps status outputs in the logs:
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: qshell gotten: gps status
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: arg0 = 'gps'
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: arg1 = 'status'
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: Main GPS
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: protocol: UBX
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: status: NOT OK, port: 6, baudrate: 115200
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: sat info: enabled
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: rate reading: 0 B/s
May 02 20:57:33 m0054 voxl-px4[1746]: INFO [muorb] SLPI: Ok executing command: gps statusI also went into the u-center with the F9P and made sure that ubx was a protocol for in/out.
voxl-ardupilot doesn't have any issues connecting, so wondering if this is just a px4 gps driver issue specific to the voxl setup. I am on voxl-suite 1.4.1
Any advice on this? Thanks for any info -
5G Modem Carrier Board Quectel modem support?Hello, we purchased some standalone voxl2's + 5G modem carrier boards with quectel modems in the past. I forget exactly, but I believe we received these Quectels from Modalai when they were sold together on the website (i might be remembering incorrectly).
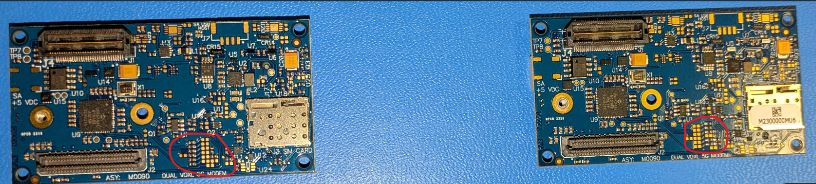
More recently, we purchased the Starling 2 Max and the 5G modem boards (without a modem). We plan to use some Quectel RM502N-GL like we have in the past. Today, it was discovered that the old 5G carrier boards detect the quectel on lsusb, while the new ones do not at all. I narrowed it down to the new 5G modem carrier boards and even have the following photo showing resistors are different. Do you know if there is a compatibility change that wasn't made clear on the website?
The board on the left works with quectel
-
Starling v1 GPS ErrorLet me know what you figure out. Is your 3D filament something like Onyx, that has some sort of carbon in it?
-
Starling v1 GPS Errorprobably around 8 satellites on average. Sometimes going up to 10. I also had difficulty getting any satellites after a reboot a few times. It took multiple minutes to see anything at all.
-
Starling v1 GPS ErrorAlright, I will look into the parameter sets. Could you point me in the direction of those parameter sets and how you typically swap them on the starling? I think I saw a post about something like that on this forum.
I will also post a screenshot of my GPS error for your reference, as I do think its error is much higher than it should be. 15 ft might have been an understatement.
thanks
-
Starling v1 GPS ErrorThanks for the EKF2 information.
I did end up finding the voxl sdk calibration for the IMU and Gyro. I also was able to use a different wifi dongle that didn't not have a connection issue when I flipped the drone upside down, so I could then do the compass calibration.
Regarding the GPS, what I am seeing if the warnings, but also they are warranted, given that on QGC I can see my phones GPS location and the drone is almost always 15 or more feet away from the correct location. Should I expect at least accuracy within 2-3 feet with the Starling's GPS or no?
And then regarding the position mode failing and forcing the drone to climb, I think when this happens the qvio is at 1% quality, but shouldn't the IMU+GPS+barometer be able to override this? I assume that is sort of what the EKF is aggregating together, but I am not very knowledgeable on this.
Thanks
Sam -
Starling v1 GPS ErrorI am trying to setup a Starling with the 5G modem breakout board attached and then using the USB jst->usbA dongle to use the original Alfa wifi dongle.
What I am seeing, even when completely removing the 5G modem and the Wifi dongle is that I always get GPS vertical and Horizontal Pos Drift too high errors. I tried remove RF components from the starling, such as the 5G modem and Wifi to fix the error temporarily, but the GPS is still basically useless. What sort of Error should I expect to see with this GPS module on the starling?
Also, are there any compass, gyro, accelerometer calibration steps I can take. I tried doing to QGC calibration over Wifi, but the Wifi would also stop broadcasting on the starling, which is a whole different issue. I would stick with just QVIO, but even that has a bug where I cannot overcome the desire for the starling to increase altitude, so I have to go into manual mode or use the kill switch.
Lots of question in one, but all my attempts to resolve issues just revealed more issues.-Sam
-
RB5 Flight Replacement ESC version?We crashed our RB5 Flight a while ago and are only getting around to trying to fix it now. It impacted the ground pretty hard right over the ESC, and the ESC isn't beeping or indicating with LEDs when powering up, so I suspect that is the problem. Everything else on the drone works fine.
I see this https://www.modalai.com/products/voxl-esc?variant=44353436614960 online and am confused on the specific version we need for a replacement.Standard M0117
Disable Regen M0117
Standard M0134
Disable Regen M0134Out drone serial number is M2100000CUH. Our current ESC simply reads ESC Rev B 2020
Also, what does Disable Regen mean?
Thanks for any helpESC Rev B 2020
-
QGroundControl Autoconnect when on same network with VOXL SDKI'll be using a private 5G network, and I can't do static IP's for my devices, sadly. Maybe I didn't understood what the RB5 SDK was doing, but I am curious how, in some of the docs, it says that qgc will find the device if its on the same network. Is there a broadcast mode I can be in, since my network will be secure?
-
QGroundControl Autoconnect when on same network with VOXL SDKWe have the Qualcomm RB5 flight drone and when it had the RB5 SDK, we would connect to the drone automatically with qgroundcontrol when that qgc device was on the same network. After updating to VOXL SDK for other reasons, I have to either enter the qgc IP or connect via the qgc app in comm links. for my scenario, I cannot guarantee a static IP of the drone, even with staticip service, so I would like the rb5 SDK functionality with autoconnecting. Is this possible?
Thanks