@Alex-Kushleyev Hi Alex, When I hold the drone in hand and move around the room, I see that VIO is at 100%. It only fails when I shake the drone or start flying it. I'm not sure what's going wrong.
R
riteshsharma
@riteshsharma
Posts
-
Configuring extrinsics on Starling (Voxl2) -
Configuring extrinsics on Starling (Voxl2)@riteshsharma Hi @admin @Moderator @Alex-Kushleyev Can you please help me in this regard? I am stuck at it and could not move further for almost a month now.
-
Configuring extrinsics on Starling (Voxl2)@Alex-Kushleyev Did you have a chance to look at the logs and the video?
-
Configuring extrinsics on Starling (Voxl2)@Alex-Kushleyev Hi Alex,
I uploaded the qvio overlay video and logs at the link https://drive.google.com/drive/folders/105QyDrfBvA52eWwrdS9NHI0q9LHTPbMA?usp=drive_link for you to review. Can you please have a look at it?
-
Configuring extrinsics on Starling (Voxl2)@Alex-Kushleyev
Hi Alex, I was able to take picture and prepare video as you asked. Please find here Video & Images -
Configuring extrinsics on Starling (Voxl2)I tried your suggestion. It works until I move the drone quickly or shake it abruptly. The quality goes to -1 and feature which were being tracked are not longer following actual features.
Also, regarding camera transform, the starling drone( with silver motor) drone I have is in factory assembly. It would be great, if you could share the config file for camera transform.
-
Configuring extrinsics on Starling (Voxl2)@Moderator @Alex-Kushleyev Hi Alex, I actually don't remember exact version.
I am sharing my flight logs(links: [https://drive.google.com/drive/folders/1v0FVU-SGO8WZukiOfFMfS7vYAGeJIq3E?usp=drive_link](link url)) and video of what happens when I try to fly in position mode. It just keeps climbing and had to press kill-switch. Just to let you know I am using starling drone in its factory setting (without any hardware damage) and re-flashed it with VOXL 2 SDK 1.2.0 using the option
./install.sh -wMy current configurations:
Also, when i run voxl-health-check, it fail the test. however I can see all my camera server working in Voxl-portal
voxl2:~$ voxl-health-check SKU: MRB-D0005-4-V2-C6-T8 >> calOk: True >> compute: > imageSensor0 probe: CAM_START_DEV Success, sensor_id:0x3d,sensor_slave_addr:0x7a result: True > imageSensor1 probe: error result: False > imageSensor2 probe: CAM_START_DEV Success, sensor_id:0x7750,sensor_slave_addr:0xe2 result: True >> voxl-camera-server: > result: False > running: True > mpaOk: True > tof_conf: False > tof_pc: True > tof_depth: False > tof_ir: False > tracking: False > hires_large_color: False > hires_large_grey: False > hires_large_encoded: False > hires_small_color: False > hires_small_grey: False > hires_small_encoded: False > tof_confPipe: error > tof_pcPipe: /run/mpa/tof_pc/info > tof_depthPipe: error > tof_irPipe: error > trackingPipe: error > hires_large_colorPipe: error > hires_large_greyPipe: error > hires_large_encodedPipe: error > hires_small_colorPipe: error > hires_small_greyPipe: error > hires_small_encodedPipe: error >> voxl-mavlink-server: > result: True > running: True >> voxl-px4: > result: True > running: True > error: False > execStart: /usr/bin/voxl-px4 > sensor_accel x: -0.10558 y: -0.07159 z: -9.90697 result: True > sensor_gyro x: 0.01312 y: 0.00221 z: -0.02396 result: True > sensor_baro temperature: 31.71471 pressure: 97145.28125 result: True > sensor_mag x: -0.26683 y: -0.28708 z: 0.62417 result: True > battery_status voltage_filtered_v: 8.62994 result: True > sensor_gps lon: 0.0 lat: 0.0 alt: -17000.0 vel_m_s: 0.0 satellites_used: 0 device_id: 11272245 result: True >> voxl-imu-server: > result: True > running: True > mpaPipe: /run/mpa/imu_apps/info > device: ICM42688 >> voxl-qvio-server: > result: True > running: True > mpaPipe: /run/mpa/qvio/info >> voxl-vision-hub: > result: True > running: True > mpaPipeVoaPcOut: /run/mpa/voa_pc_out/info > mpaPipeFixed: /run/mpa/vvhub_body_wrt_fixed/info > mpaPipeLocal: /run/mpa/vvhub_body_wrt_local/info > mpaPipeFixedPoseInput: /run/mpa/vvhub_fixed_pose_input Health Check: Fail voxl2:~$ -
PX4 params missing@restore How did you do full wipe? Can you please post the steps to do so?
-
Configuring extrinsics on Starling (Voxl2)@Eric-Katzfey I troubleshooted using the instruction on the https://docs.modalai.com/flying-with-vio/#troubleshooting-vio. Still as soon as the drone takes off, the quality of qvio goes down to -1.
I also tried to reflash the drone with the system image VOXL 2 SDK 1.2.0 and enabled every thing to factory settings, still the drone starts drifting and qvio falls below -1. But qvio at the ground always shows 100% quality,
Do you have any other suggestion?
-
Configuring extrinsics on Starling (Voxl2)@tom Thank you. I tried running
voxl-configure-skuandvoxl-configure-mpaand flew the drone. It just do not hold position and qvio goes to -1.I then tried running
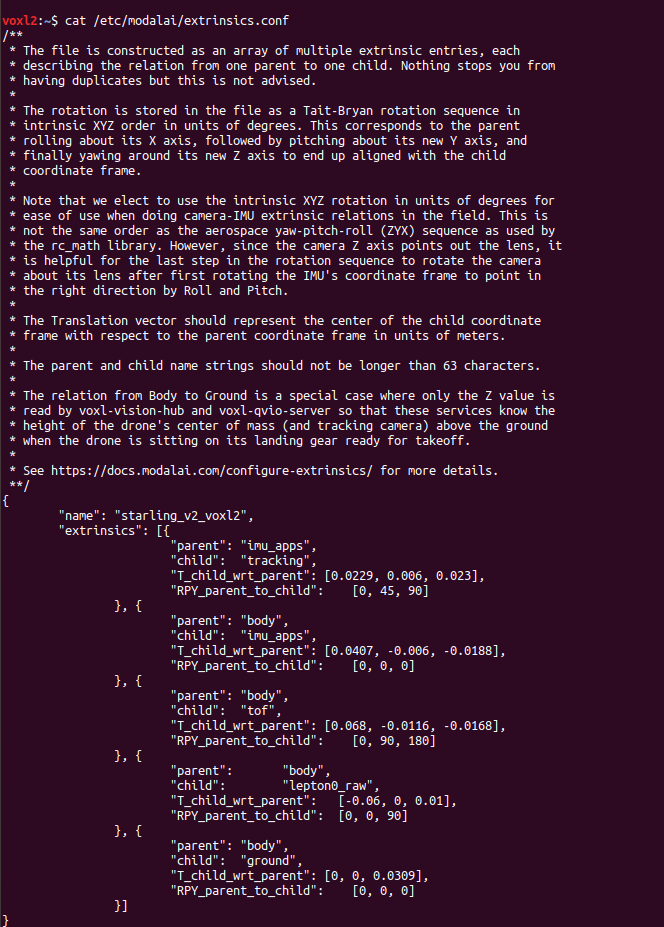
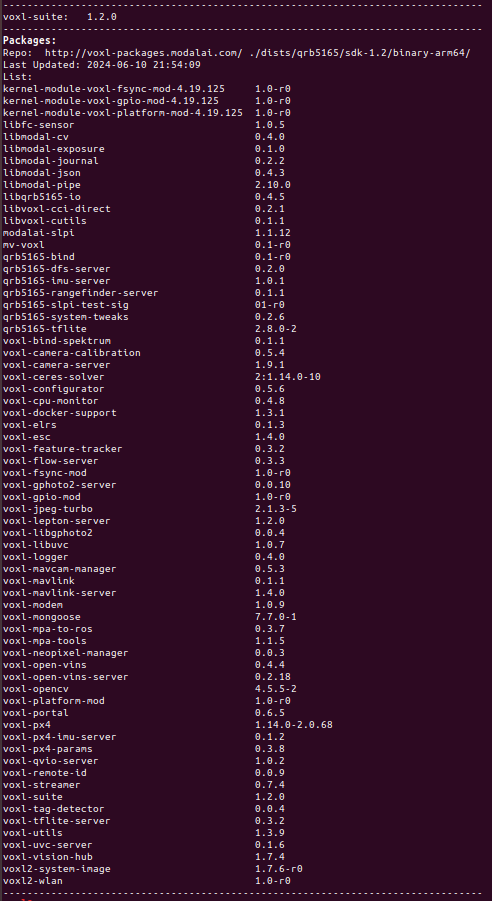
voxl-configure-extrinsics starling_v2_voxl2and flew the drone again. The result was the same. The drone is not holding its position.voxl2:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.7.6-M0054-14.1a-perf kernel: #1 SMP PREEMPT Wed Mar 20 19:48:52 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0 -------------------------------------------------------------------------------- voxl-suite: 1.2.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.2/binary-arm64/ Last Updated: 2024-05-22 21:32:55 List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libfc-sensor 1.0.5 libmodal-cv 0.4.0 libmodal-exposure 0.1.0 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.10.0 libqrb5165-io 0.4.5 libvoxl-cci-direct 0.2.1 libvoxl-cutils 0.1.1 modalai-slpi 1.1.12 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.0.1 qrb5165-rangefinder-server 0.1.1 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.2.6 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.5.4 voxl-camera-server 1.9.1 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 0.5.6 voxl-cpu-monitor 0.4.8 voxl-docker-support 1.3.1 voxl-elrs 0.1.3 voxl-esc 1.4.0 voxl-feature-tracker 0.3.2 voxl-flow-server 0.3.3 voxl-fsync-mod 1.0-r0 voxl-gphoto2-server 0.0.10 voxl-gpio-mod 1.0-r0 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.2.0 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.4.0 voxl-mavcam-manager 0.5.3 voxl-mavlink 0.1.1 voxl-mavlink-server 1.4.0 voxl-microdds-agent 2.4.1-0 voxl-modem 1.0.9 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.7 voxl-mpa-to-ros2 0.0.3 voxl-mpa-tools 1.1.5 voxl-neopixel-manager 0.0.3 voxl-open-vins 0.4.4 voxl-open-vins-server 0.2.18 voxl-opencv 4.5.5-2 voxl-platform-mod 1.0-r0 voxl-portal 0.6.5 voxl-px4 1.14.0-2.0.68 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.3.8 voxl-qvio-server 1.0.2 voxl-remote-id 0.0.9 voxl-ros2-foxy 0.0.1 voxl-streamer 0.7.4 voxl-suite 1.2.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.2 voxl-utils 1.3.9 voxl-uvc-server 0.1.6 voxl-vision-hub 1.7.4 voxl2-system-image 1.7.6-r0 voxl2-wlan 1.0-r0 -------------------------------------------------------------------------------- voxl2:~$ voxl-inspect-sku family code: MRB-D0005 (starling) compute board: 4 (voxl2) hw version: 2 cam config: 6 tx config: 8 SKU: MRB-D0005-4-V2-C6-T8 voxl2:~$ voxl-configure-extrinsics starling_v2_voxl2 wiping old extrinsics config file copying /usr/share/modalai/extrinsic_configs/starling_v2_voxl2.conf to /etc/modalai/extrinsics.conf loading and updating file with voxl-inspect-extrinsics -q done configuring extrinsics voxl2:~$ -
Configuring extrinsics on Starling (Voxl2)@tom Hi Tom, I re-flashed with the latest VOXL 2 SDK 1.2.0 via install.sh script. Now, to configure extrinsics what should I choose?
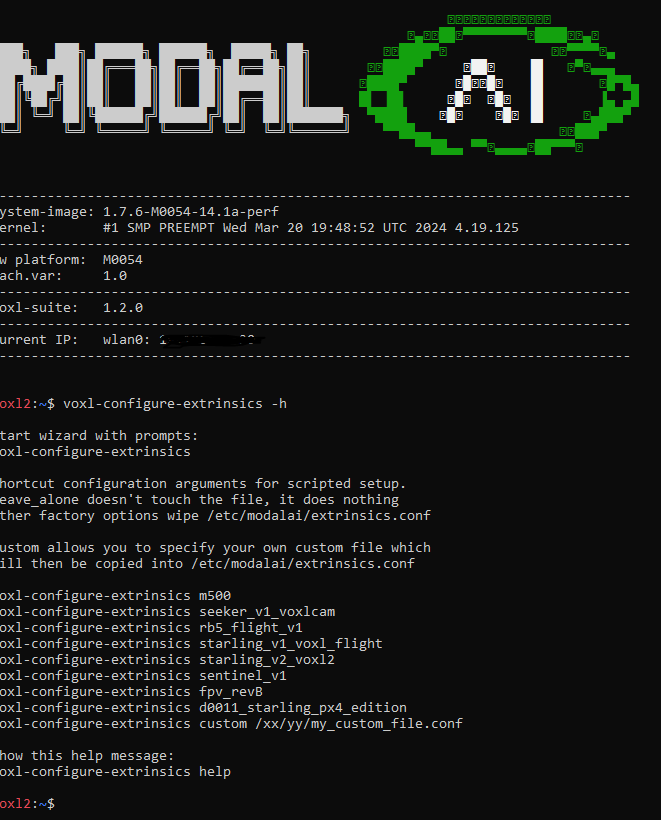
I dont see any option saying startling_v1_voxl2 or as such.
-
Configuring extrinsics on Starling (Voxl2)Hi, I recently ran "apt update" and "apt upgrade" on my starling drone. Since then the drone is not holding position and keep climbing. I believe it is something to do with extrinsic configuration. Before, the option for extrinsic configuration used to show "voxl-configure-extrinsics factory_starling_v1" but now the option is gone. Can you please help me how to configure extrinsics given the information below:
-
Something wrong with my Starling@Darshit-Desai I am having the same issue on both VOXL and VOXL2 after the upgrade. Let me know if you figure out.
-
Camera server failing after the update@tom In that case, how can I downgrade and go back to initial stage. Do you have any suggestion?
-
Camera server failing after the updateVoxl-camera-server is failing after I upgraded the packages on starling drone.
voxl2:/$ voxl-version -------------------------------------------------------------------------------- system-image: 1.7.4-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri Feb 9 21:59:24 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0 -------------------------------------------------------------------------------- voxl-suite: 1.2.0-202404022201 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/dev/binary-arm64/ Last Updated: 2024-04-03 16:41:43 List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libmodal-cv 0.5.5-202402131035 libmodal-exposure 0.1.0-202310231718 libmodal-journal 0.2.2-202211021731 libmodal-json 0.4.3-202209281920 libmodal-pipe 2.10.0-202311162306 libqrb5165-io 0.4.4-202401141445 libvoxl-cci-direct 0.2.1-202309211746 libvoxl-cutils 0.1.1-202210072352 modalai-slpi 1.1.12-202312191452 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0-202309221318 qrb5165-imu-server 1.0.1-202312010251 qrb5165-rangefinder-server 0.1.1-202312111703 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.2.6-202402151128 qrb5165-tflite 2.8.0-2-202210071637 voxl-bind-spektrum 0.1.1-202403271220 voxl-camera-calibration 0.5.4-202401081655 voxl-camera-server 1.9.0-202403211533 voxl-capture 0.0.1-202206110121 voxl-ceres-solver 2:1.14.0-10-202310130020 voxl-configurator 0.5.3-202403121650 voxl-cpu-monitor 0.4.8-202402061134 voxl-docker-support 1.3.0-202309201525 voxl-elrs 0.2.1-202403141429 voxl-esc 1.4.0-202403251514 voxl-feature-tracker 0.3.8-202403261346 voxl-flow-server 0.3.6-202403180603 voxl-fsync-mod 1.0-r0 voxl-gphoto2-server 0.0.10-202210072352 voxl-gpio-mod 1.0-r0 voxl-jpeg-turbo 2.1.3-5-202311071550 voxl-lepton-server 1.2.1-202403180611 voxl-lepton-tracker 0.0.1-202402261317 voxl-libgphoto2 0.0.4-202204111958 voxl-libuvc 1.0.7-202210072357 voxl-logger 0.3.12-202403261022 voxl-mapper 0.2.1-202403201826 voxl-mavcam-manager 0.5.4-202401290941 voxl-mavlink 0.1.1-202305011701 voxl-mavlink-server 1.4.0-202403191520 voxl-microdds-agent 2.4.1-0-202311211206 voxl-modem 1.0.9-202403121543 voxl-mongoose 7.7.0-1-202210072105 voxl-mpa-to-ros 0.3.7-202310131817 voxl-mpa-to-ros2 0.0.2-202402291159 voxl-mpa-tools 1.1.5-202403201735 voxl-neopixel-manager 0.0.3-202312061522 voxl-nlopt 2.5.0-4-202210072358 voxl-open-vins 0.4.10-202403281925 voxl-open-vins-server 0.2.46-202403281925 voxl-opencv 4.5.5-2-202311071601 voxl-platform-mod 1.0-r0 voxl-portal 0.6.5-202403201802 voxl-px4 1.14.0-2.0.69-202402061301 voxl-px4-imu-server 0.1.2-202205131833 voxl-px4-params 0.3.6-202403111442 voxl-qvio-server 1.0.2-202403151128 voxl-remote-id 0.0.9-202309191605 voxl-ros2-foxy 0.0.1-202310061042 voxl-rtp 0.0.1-202206101543 voxl-stitcher 0.0.2-202206161634 voxl-streamer 0.7.4-202309221610 voxl-suite 1.2.0-202404022201 voxl-tag-detector 0.0.4-202206302112 voxl-tflite-server 0.3.2-202401161222 voxl-utils 1.3.8-202402131713 voxl-uvc-server 0.1.6-202311050848 voxl-vision-hub 1.7.4-202401161503 voxl-voxblox 1.1.5-202310122350 voxl-wifi-broadcast 0.0.10-202206122258 voxl2-io 0.0.1-202401181810 voxl2-system-image 1.7.4-r0 voxl2-wlan 1.0-r0 --------------------------------------------------------------------------------```voxl2:/$ voxl-inspect-services
Scanning services...Service Name | Enabled | Running | CPU Usage
docker-autorun | Disabled | Not Running |
modallink-relink | Disabled | Not Running |
voxl-camera-server | Enabled | Not Running |
voxl-cpu-monitor | Enabled | Running | 0.7%
voxl-dfs-server | Disabled | Not Running |
voxl-feature-tracker | Disabled | Not Running |
voxl-flow-server | Disabled | Not Running |
voxl-imu-server | Enabled | Running | 6.0%
voxl-lepton-server | Disabled | Not Running |
voxl-lepton-tracker | Disabled | Not Running |
voxl-mapper | Enabled | Running | 0.4%
voxl-mavcam-manager | Enabled | Running | 0.0%
voxl-mavlink-server | Enabled | Running | 4.4%
voxl-microdds-agent | Disabled | Not Running |
voxl-modem | Disabled | Not Running |
voxl-neopixel-manager | Disabled | Not Running |
voxl-open-vins-server | Disabled | Not Running |
voxl-portal | Enabled | Running | 0.6%
voxl-px4-imu-server | Disabled | Not Running |
voxl-px4 | Enabled | Running | 38.9%
voxl-qvio-server | Enabled | Running | 5.0%
voxl-rangefinder-server | Disabled | Not Running |
voxl-remote-id | Disabled | Not Running |
voxl-softap | Disabled | Not Running |
voxl-static-ip | Disabled | Not Running |
voxl-stitcher | Disabled | Not Running |
voxl-streamer | Enabled | Running | 0.1%
voxl-tag-detector | Disabled | Not Running |
voxl-tflite-server | Disabled | Not Running |
voxl-time-sync | Disabled | Not Running |
voxl-uvc-server | Disabled | Not Running |
voxl-vision-hub | Enabled | Running | 1.8%
voxl-wait-for-fs | Enabled | Completed |
voxl-wfb-rx-video | Disabled | Not Running |
voxl-wfb-rx | Disabled | Not Running |
voxl-wfb-tx-video | Disabled | Not Running |
voxl-wfb-tx | Disabled | Not Running |voxl2:/$ voxl-camera-server
voxl-camera-server: symbol lookup error: voxl-camera-server: undefined symbol: _ZTIN6royale3pal13II2cBusAccessE -
Using Logitech Brio USB camera as device in voxl-uvc-serverUpdate on following up on this topic. I was able to use other camera including Logitech Brio as suggested on ModalAI webpage. It only support YUV format not MJPEG streaming. With YUV format on Logitech Brio, I was only able to get 1920x1080 at 5 fps. But could not get MJPEG working.
-
Using Logitech Brio USB camera as device in voxl-uvc-serverI am wondering if anyone have ever used Logitech Brio USB camera as a device in voxl-uvc-server running on voxl-deck. If yes, what is the highest resolution you have obtained at 30 fps ?
I am trying to use a very high resolution camera 4k or more with high fps for live inspection. Will voxl allow to configure such camera with uvc-server?
-
Adding USB camera to Voxl1@Alex-Kushleyev
Thank you @Alex-Kushleyev . Finally I was able to modify the code to make it work for 2 USB cameras.