yessss 6x9 and a white background both improved detection rate, not just latency. Thanks for your help!
Patrick Hinchey
@Patrick Hinchey
Posts
-
VOXL2 camera cal looks wierd -
VOXL2 camera cal looks wierd@Alex-Gardner oops silly me!! The latency has been awful on this latest calibration, on the order of 2s, so that is probably a major contributor! Thanks I'll try with white tape an 6x9
-
VOXL2 camera cal looks wierdHaha ok ^_^
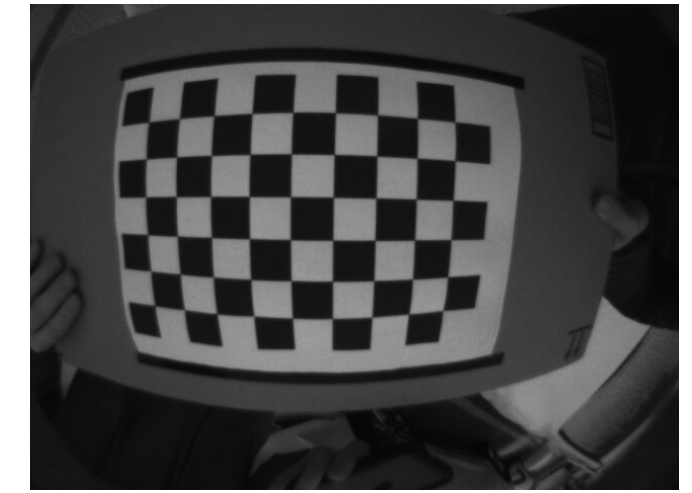
We moved out of the office to an overcast day outside. The image of the checkerboard looks good, how come it can't detect it?

-
VOXL2 camera cal looks wierdYes my image is MUCH noisier than that even when it's not over/underexposed. Lighting is bright though...
On another topic, should I be using --fisheye for the standard tracking cam? -
VOXL2 camera cal looks wierdOh I see. Ok it's on standard printer paper, I'll try to get some more diffuse lighting...
-
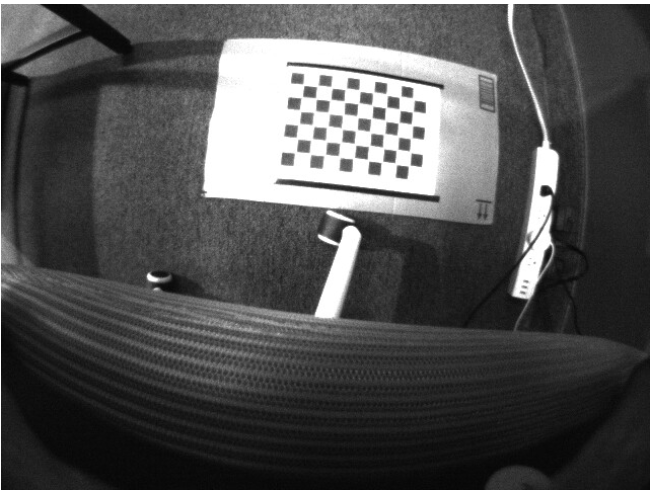
VOXL2 camera cal looks wierdThe dynamic range is a little wide, but the normal tracking camera image looks quite fine
-
VOXL2 camera cal looks wierdI should mention that it's not always overexposed like that. Obviously it wouldn't be able to identify the checkerboard with the edges blown out like that, but even when exposure is good, it doesn't work.
Why is it so overexposed?
-
VOXL2 camera cal looks wierdIs this normal? The video tutorial doesn't look like this at all, with the weird 2-bit colour over-saturated look.
It's extremely hard to get it to detect the corners and draw those rainbow lines. I might try for like 2 or 3 minutes, holding different angles and positions, then it will flash the rainbow lines for and instant and I lose them again.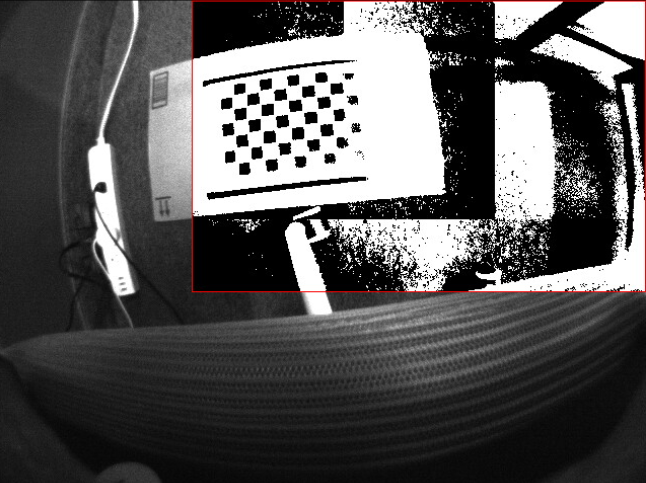
-
Garbage attitude control@modaltb Sorry for not replying. Is there an option to set up email notifications?
Yep I was talking to the ESC with voxl-esc python tools. And I believe it was indeed at 2Mbaud.We've decided to use the FlightCore V2 as the flight controller going forward, with VOXL2 acting only as companion computer. We may revisit this sometime in the future as a weight-reduction exercise, but not any time soon
-
Garbage attitude control@Chad-Sweet @xav04 I have had a chance to get our new ModalAI x T-motor F55A ESCs out of the box and plug them in. I can communicate with them over FTDI converter on my laptop, but the VOXL2 doesn't recognise them.
There's not much troubleshooting I can do as the tutorial just says to plug it in and set the correct PX parameters. Do I remember correctly that I read somewhere the MAVLink console doesn't work on VOXL2? It certainly doesn't work on mine.
The motors don't spin when I arm, and I'm not getting any telemetry info from them.
I followed the tutorial for VOXL EXC V2. IS there anything special I need for the F55A? -
0,0,1 not going where I think it willNo tragedy happened though

-
0,0,1 not going where I think it willThanks for the tip!
I tried your suggestion and it didn't fix the problem, but I did find something else out:
If I send it to 0,0,1, then fly away in POSITION mode, then send it back to 0,0,1, and repeat, it always goes back to the same place, but that place slowly drifts as you would expect VIO to do. Even though a fixed AprilTag is in view. I can see that it identifies the tag in voxl-portal.
So from that I deduce that it's not relocalising using the AprilTag.
What setting an I missing? I've set en_fixed_frame, and my tag is set as fixed. -
0,0,1 not going where I think it willHello,
I have an fixed-type AprilTag located at 0,0,0. I have a rospy routine that commands the vehicle to 0,0,1 over MAVROS with the script below.
When I switch to offboard mode, the drone very deliberately flies to the same place every time, but it's not above the tag. It can see the tag in its FoV and voxl-portal draws a little square around it and labels it "0". Am I publishing to the right topic? Did I miss something in the AprilTag setup? I notice in MAVSDK you specify the reference frame, but I don't see anything about that in rospy MAVROS.
#! /usr/bin/env python import rospy from geometry_msgs.msg import PoseStamped from mavros_msgs.msg import State from mavros_msgs.srv import CommandBool, CommandBoolRequest, SetMode, SetModeRequest current_state = State() def state_cb(msg): global current_state current_state = msg if __name__ == "__main__": rospy.init_node("offb_node_py") state_sub = rospy.Subscriber("mavros/state", State, callback = state_cb) local_pos_pub = rospy.Publisher("mavros/setpoint_position/local", PoseStamped, queue_size=10) # Setpoint publishing MUST be faster than 2Hz rate = rospy.Rate(20) # Wait for Flight Controller connection while(not rospy.is_shutdown() and not current_state.connected): rate.sleep() rospy.loginfo("Connected to MAVROS") target_pose = PoseStamped() # Initial pose 1m above tag - go here as soon as mode is switched to OFFBOARD. target_pose.pose.position.x = 0 target_pose.pose.position.y = 0 target_pose.pose.position.z = 1 while(not rospy.is_shutdown()): local_pos_pub.publish(target_pose) rate.sleep()Here is a snippet from tag_locations.conf:
"locations": [{ "id": 0, "name": "nest-roof", "loc_type": "fixed", "size_m": 0.226, "T_tag_wrt_fixed": [0, 0, 0], "R_tag_to_fixed": [[0, -1, 0], [1, 0, 0], [0, 0, 1]] },Here is a snippet from voxl-vision-px4.conf
{ "config_file_version": 1, "qgc_ip": "192.168.8.60", "en_secondary_qgc": false, "secondary_qgc_ip": "192.168.1.214", "qgc_udp_port_number": 14550, "udp_mtu": 512, "en_localhost_mavlink_udp": true, "localhost_udp_port_number": 14551, "vio_pipe": "qvio", "en_vio": true, "en_send_vio_to_qgc": true, "en_reset_vio_if_initialized_inverted": true, "vio_warmup_s": 3, "send_odom_while_failed": false, "horizon_cal_tolerance": 0.5, "offboard_mode": "off", "follow_tag_id": 0, "figure_eight_move_home": true, "robot_radius": 0.300000011920929, "collision_sampling_dt": 0.1, "max_lookahead_distance": 1, "en_tag_fixed_frame": true, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": true, "en_voa": false, "en_send_voa_to_qgc": false, "voa_upper_bound_m": -0.15000000596046448, "voa_lower_bound_m": 0.15000000596046448, "voa_memory_s": 1, "voa_inputs": [{Thanks in advance!
-
Offboard mode with GPS and AprilTagIs it possible to use offboard mode with AprilTag relocalisation with EKF2_AID_MASK set to 329 i.e. fusing GPS?
Our drone works great with VIO only, and it works with GPS only, but I want to land on an AprilTag while outdoors with GPS fusion.
I have set the AprilTag to fixed frame 0,0,0. When I switch to offboard mode, which is simply commanding a 0,0,1.5 setpoint, the drone goes somewhere else entirely -
VOXL2 - rebooting external flight controller over MAVLinkHmm, it looks like none of those options are available to our configuration, so we will have to stick with USB through the 4G carrier.
I've found that the Pixhawk is rebooting now (not sure if something changed, or if I'm going crazy) but voxl-mavlink-server fails, and continues to fail if I systemctl restart voxl-mavlink-server so I have to reboot the voxl2 with every Pixhawk reboot.
Not that big of a deal. Has the bug been fixed where sudo reboot takes a couple of minutes to actually reboot the VOXL2? Each time I want to reboot the Pixhawk it's about a 5 minute process -
mpa to ros voxl-tag detector@Alex-Gardner Is there any way to get the tag X.Y.Z coords in ROS?
-
VOXL2 - rebooting external flight controller over MAVLinkOh, but that uses the same plug as the LTE modem. How about the GPS connector?
-
mpa to ros voxl-tag detectorDid anything come of this?
I'm also trying to access AprilTag location in ROS, but there's nothing obvious inrostopic list.
I can't find any documentation on it either.
@modaltb -
VOXL2 - rebooting external flight controller over MAVLinkOh, that's cool. I thought I needed a UART daughter board. I'll give it a go through the RC expansion port.
We have a 4G LTE board plugged in to J3, and I'm using one of its USBs currently - the other has a WiFi module.
Our aircraft is designed to not be touched for months at a time, so one of the things I like about plugging the flight controller into USB is that we could flash new firmware remotely if we wanted (unless you can do that over Telem1 too? I've never tried). -
VOXL2 - rebooting external flight controller over MAVLink@modaltb I got MAVLink over USB working by modifying line 66 of
voxl-mavlink-server/src/qrb5165_interface.c. And everything else seems to be working smoothly. If I use UART, will Pixhawk reboot over MAVLink work?