Hello everyone following to my previous attempt https://forum.modalai.com/topic/4332/qgc-cant-see-seaker-but-ssh-works/4?_=1745528516727
I have setup a second drone with newest suported version of VOXL for VOXL 1 board, which is 1.2.0.
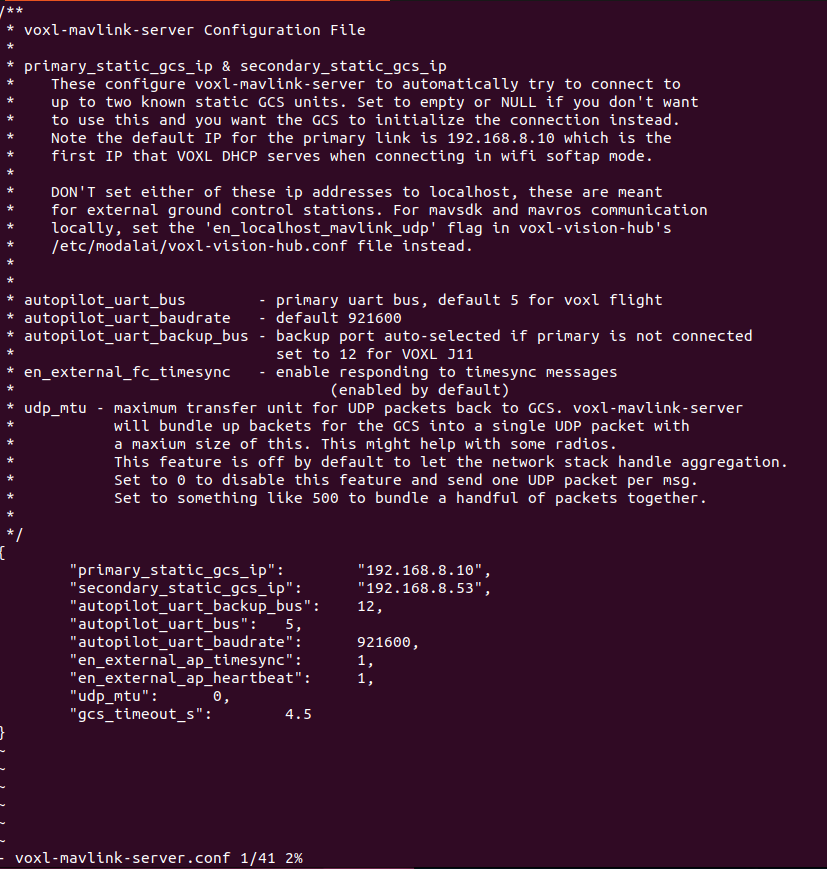
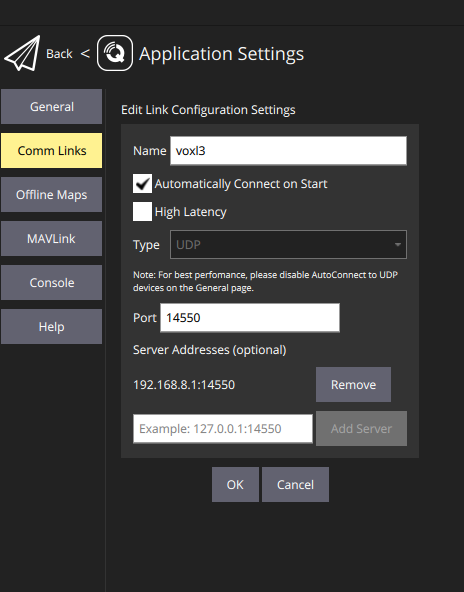
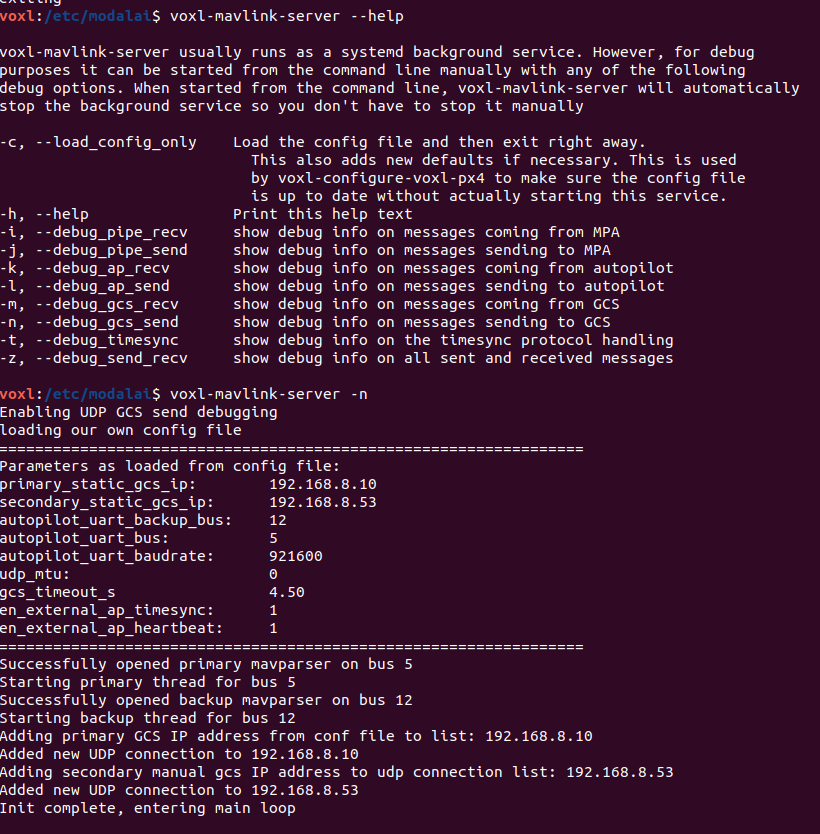
Once system is setup I setup both the mpa, as well as extrinsics, which all suceeds and reports that the drone is seeker drone with the approrpriate cameras. Now with the QGC connection I am using version 4.4.4 on Ubuntu 24. Within the drone I go to /etc/modalai/ directory and find the voxl-mavlink-server.conf file within which i set the secondary ip to the IP of my pc which in the softap mode is 192.168.8.53 with there being no default prefilled field for UDP port but it is sending the defulat connections on 14550 just that the config filoe does not have the UDP port specified. Compared to the prior version 0.9.5 there are no PX4 config files, as well as services which feels weird but unsure if that is supposed to be or not. On PC i start QGC and go to the connection tab, setup a new link, UDP and enter the IP adress of the drone with the Port number.
Now to the issues:
- Sometimes the ADB shell does not detect the drone, the ssh config does work but when connected to the specified port on the drone and running adb shell it marks that there are no devices.
- Connecting to the QGC, when running voxl-inspect-mavlink any of the options it sometimes does report: waiting for the pipe to connect
2.1 When the above commands to produce outputs it is showing and reporting connection to the ground control program but the QGC does show its disconnected and when looking in the mavlink inspect part of qgc it does not show anything.
- when running voxl-mavlink-server and then setting to check from MPA or autopilot or GCS i am getting that: init complete entering main loop
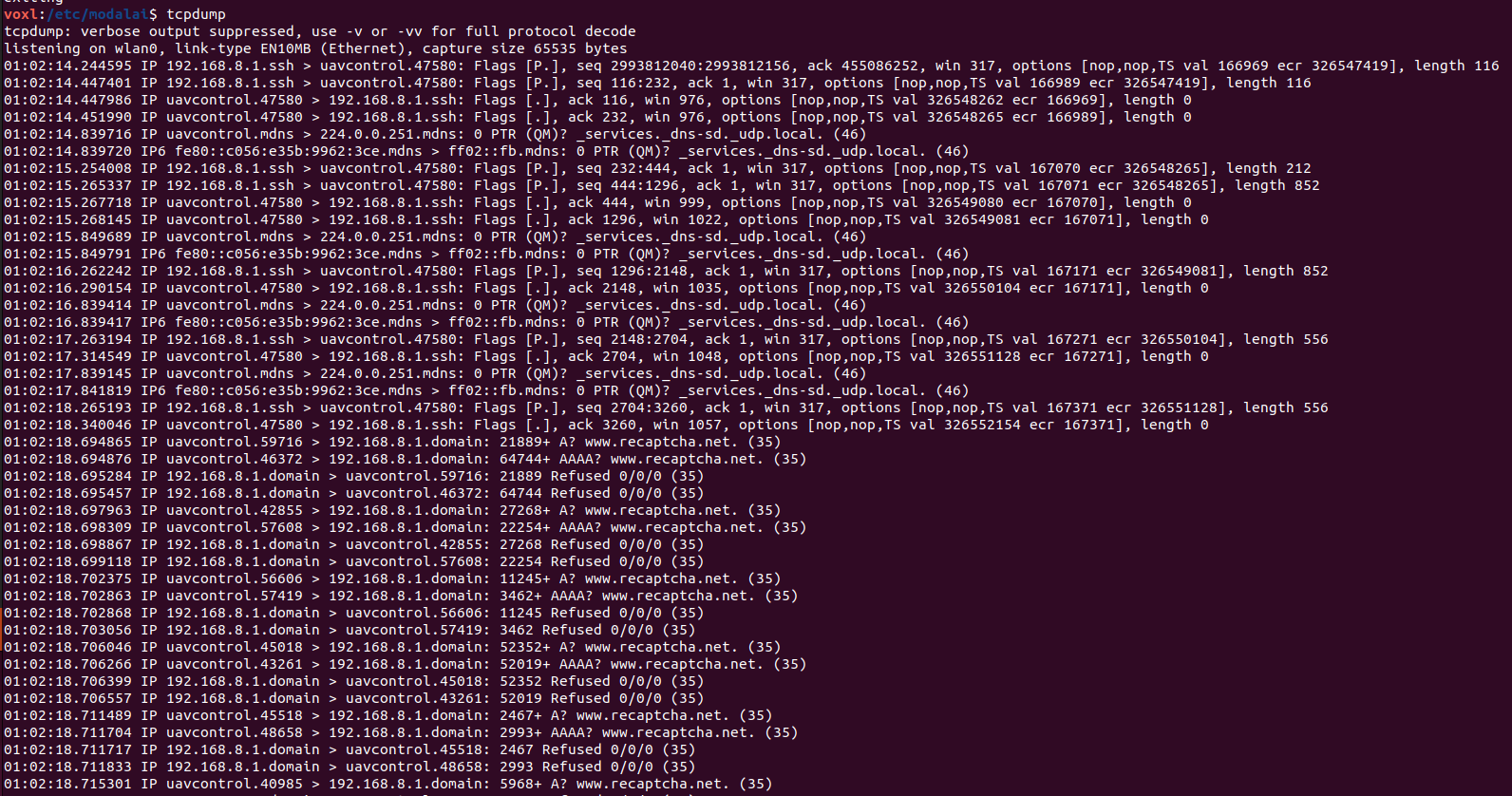
3.1 and some times when the comands do respond i am getting the UDP connection showing packets beign send from drone to the IP, but nothing much sent from QGC.
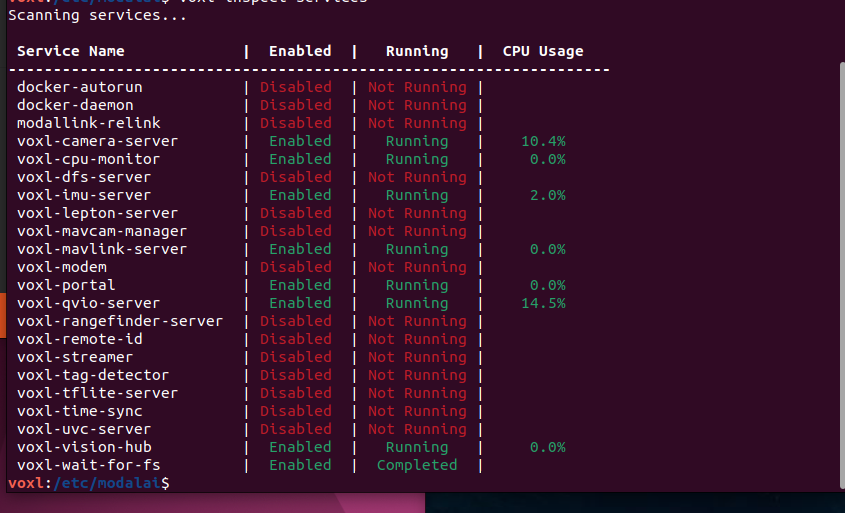
Now what I have tried. I tried different veersions of QGC 4.4.0 was the oldest i tried so far. And all show that they are disconnected without any indication of connection. I use separate device connected wither to soft IP or the wifi router to monitor the ip adresses, plannign to try track packets being send but at moment all devices do not change ips. Below i am attching the services running on the drone.
 image url)
image url)
I feel that I am lost as the first drone which was mentioned in the post above, seems to be bricked with me not seeing it in adb either, and not being able to flash newer version of VOXL.
If there are any ideas or potential steps or logs I can provide I will, but at this moment I am ta loss.