Hi all
I would like to know what is the current output specification for the power module V3.
Is it a standard 5V 3A output ?
Thanks & Regards,
Mohammed Naveed
Hi all
I would like to know what is the current output specification for the power module V3.
Is it a standard 5V 3A output ?
Thanks & Regards,
Mohammed Naveed
Hi all,
I have a silly question
I have been performing VIO flights indoor without any issue. So the drone I am working with is using a pixhawk 4 gps and i am flying indoor. The GPS is disabled but the compass is still enabled. So here is the silly question, I have been always facing north while powering up my drone. Is this method correct to do for performing VIO? My thought process is that the onboard compass is able to determine the true heading, but the VIO tracking camera considers the heading where it was powered on as north.(like if i face east and power on the drone, that heading would show as north on QGC) Wouldnt this create a compass variance error while navigation?
Moving to more advance thing!
How to perform an outdoor (open field) to indoor (basement) transition while in position mode? What should be the steps i need to follow and things i should keep in mind!
Thanks & Regards,
Mohammed Naveed
Hi @Chad-Sweet
Thank you so much!
Will have try it out first on the flight deck.
Thanks & Regards,
Mohammed Naveed
Hi all
I wanted to miniaturise my voxl flight deck, and want to know what aspects should i consider while i make a new flight deck style mounting for the hardware?
As per my understanding the stereo cameras need to be set at a specific distance apart.
However i wanted to know if any parameters need to be changed so the flight core knows where the stereo camera and the tracking camera are?
Thanks & Regards,
Mohammed Naveed
Hi @alarm_hq
You could swap out manual for stabilise mode.
Go to the Vehicle setup>flight modes and select it.
You are right in position mode you should be able to get x/y and z translation.
If you have any obstacles around you, then its probably the collision prevention preventing you from making X/Y translations .
I hope this helps you out!
Regards,
Mohammed Naveed
Hi all
I wanted to know whats the maximum capacity and class micro sd card i can use with the VOXL flight deck.( voxl and flight core)
Thanks & Regards,
Mohammed Naveed
Hi @hmlow
I am facing the same issue as well!
Hi All I am trying out the VOA at moment, it works as intended! But i have this confusion when it comes to the obstacle overlay that shows on the GCS. Here ...

ModalAI Forum (forum.modalai.com)
Thanks & Regards,
Mohammed Naveed
Hi @Chad-Sweet
Wanted to know if I want a drone with just the flight core on it and no companion computer. Can i flash arducopter and use this flight core as a simple controller that can perform similar to a pixhawk?
Thanks & Regards,
Mohammed Naveed
Hi @modaltb
Sorry if i didnt mention this earlier. Its a VOXL flight deck which is having this issue. My other VOXL flight deck is working fine and we tried to interchange the board and see where the issue was and found out to be the J12 port. In the other flight deck J12 is working correctly.
I'll try the loop back test.
Thanks & Regards,
Mohammed Naveed
Hi @modaltb
No I can ADB into the voxl, so its not bricked!
This board is brand new and we were just configuring the flight core and we had just updated the custom firmware from v0.0.5 to v0.2.3.
We just wanted to do VOA.
However we found the issue, it seems to be a hardware issue!
The J12 port to which the TELEM cable is connected to is not working correctly. I physically inspected if there are any damages but couldnt find anything wrong.
This voxl was not able to communicate with another flight core as well. But once we shifted to J10 port it started to work correctly.
So is it still hardware issue?
Thanks & Regards,
Mohammed Naveed
Is there a possibility that my VOXL board is bricked? Since the issue hasn't been resolved.
Hi @modaltb
I checked it today, the issue still exists!
I followed your instructions and have attached the following messages. This is only happening on this Voxl flight deck unit, my other unit is working perfectly.
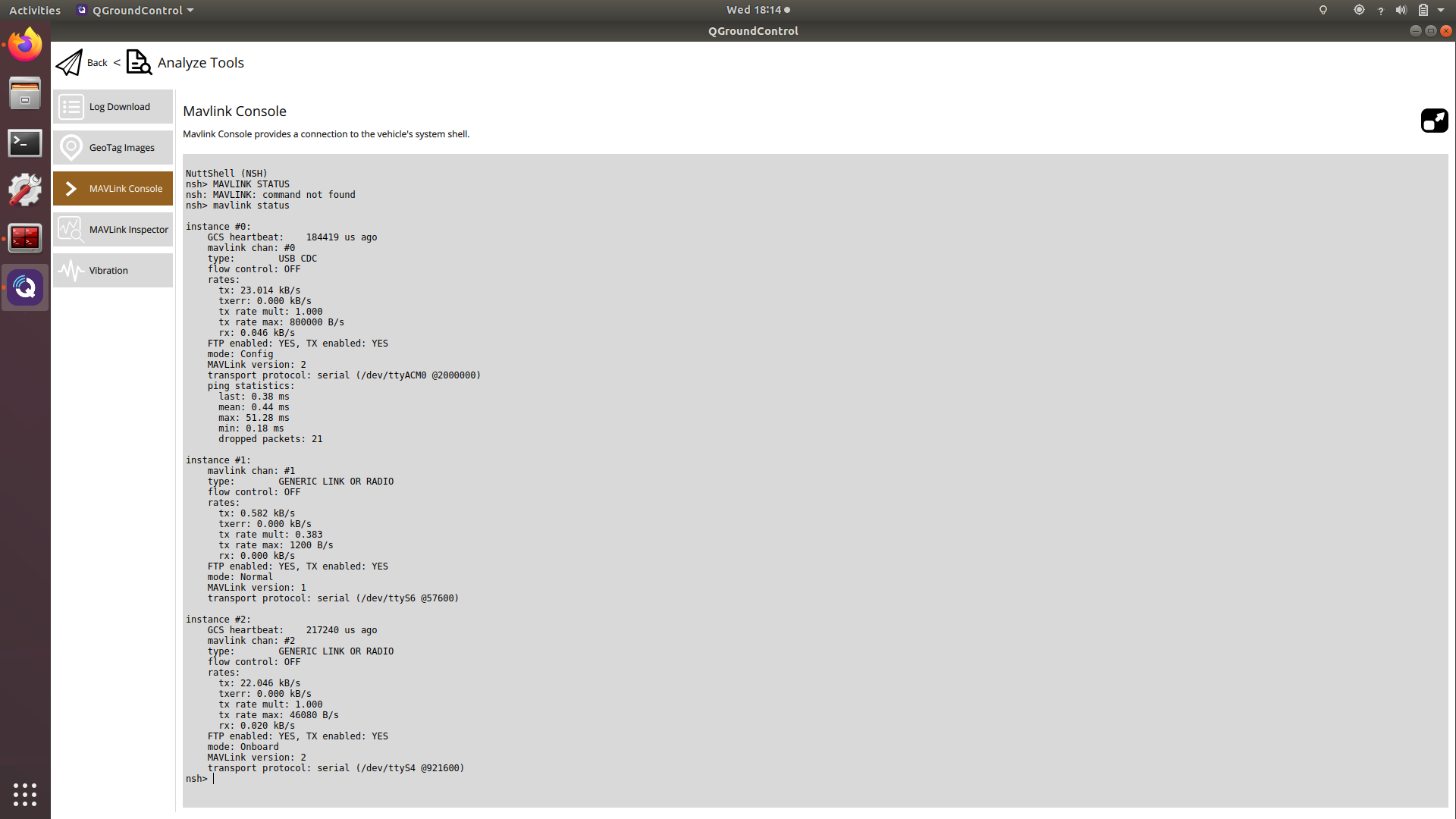
loading our own config file
=================================================================
Parameters as loaded from config file:
qgc_ip: 192.168.1.114
en_localhost_mavlink_udp 1
en_secondary_qgc: 0
secondary_qgc_ip: 192.168.1.214
qgc_udp_port_number: 14550
localhost_udp_port_number: 14551
udp_mtu: 512
en_vio: 1
en_voa: 1
en_send_vio_to_qgc: 1
en_send_voa_to_qgc: 1
en_set_clock_from_gps: 1
en_force_onboard_mav1_mode: 1
en_reset_px4_on_error: 1
qvio_auto_reset_quality: 0.000500
en_adsb: 0
adsb_uart_bus: 7
adsb_uart_baudrate: 57600
px4_uart_bus: 5
px4_uart_baudrate: 921600
offboard_mode: off
follow_tag_id: 0
en_tag_fixed_frame: 0
fixed_frame_filter_len: 5
en_transform_mavlink_pos_setpoints_from_fixed_frame:0
=================================================================
loading extrinsics config file
starting geometry module
starting px4 monitor
starting uart mavlink
Successfully opened mavparser
uart send msgid: 0 sysid: 0 compid:197
starting udp mavlink
Adding manual QGC IP address to udp connection list: 192.168.1.114
Added new UDP connection to 192.168.1.114
starting px4 shell
starting fixed pose input
starting vio manager
starting tag manager
starting voa manager
Init complete, entering main loop
Connected to voxl-qvio-server
done updating transforms to use imu: imu0
uart send msgid: 0 sysid:255 compid:190
uart send msgid: 0 sysid:255 compid:190
WARNING PX4 DISCONNECTED FROM UART
uart send msgid: 0 sysid:255 compid:190
uart send msgid: 0 sysid:255 compid:190
^C
received SIGINT Ctrl-C
Starting shutdown sequence
Stopping adsb
stopping voa manager
stopping tag manager
stopping vio manager
stopping fixed pose in module
stopping px4 shell module
Stopping udp mavlink module
exiting QGC udp listener thread
exiting localhost udp listener thread
udp_mavlink stopped
Stopping uart mavlink module
waiting for uart reader thread to join
waiting for SDSP mavparser to close
Stopping px4 monitor
closing remaining client pipes
closing remaining server pipes
Removing PID file
exiting
Please have a look at the Ulogs
Is there anything else i should a keep an eye for?
Thanks & Regards,
Mohammed Naveed
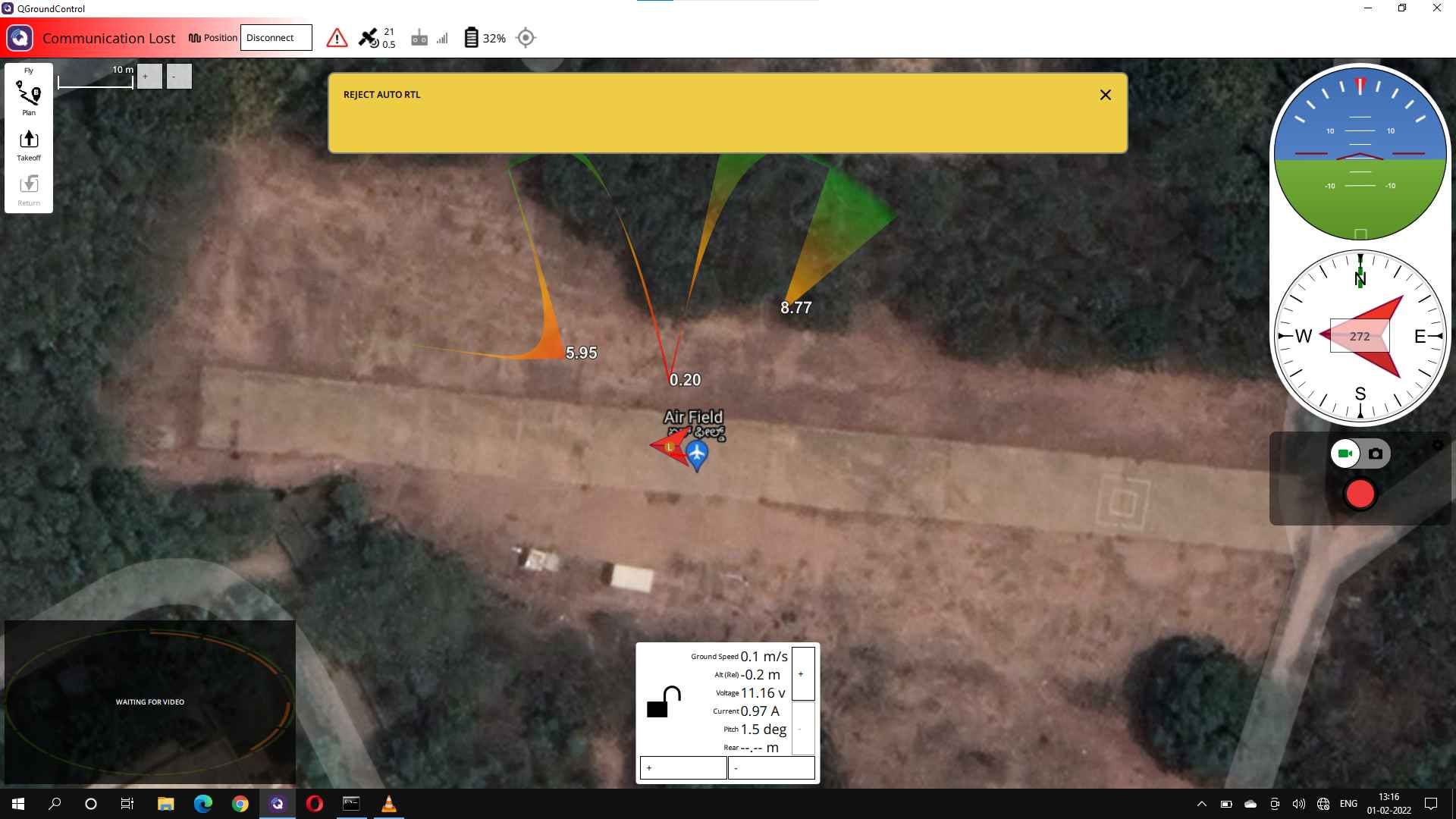
Hi All
I am trying out the VOA at moment, it works as intended!
But i have this confusion when it comes to the obstacle overlay that shows on the GCS.

Here is the scenario, the obstacle is 2m in front of the nose of the aircraft. But from the Image you can see the obstacle is shown towards the right of the aircraft. Is there any way to correct this and show the obstacle overlay correctly? Also if you see on the bottom left corner there is no video feed and the obstacle over lay is incorrect.
Other question whats the effective range and FOV within which the stereo cameras can detect an obstacle?
In the test i had done the obstacle was 1m wide and 2m high cardboard sheet, if i was not dead centre or even slightly above 2m the obstacle was not able to be detected and I was able to fly dangerously close near the obstacle.
Thanks & Regards,
Mohammed Naveed
Hi @modaltb
Its alright!
It still shows up randomly, will try your suggested method and get back soon!
Thanks & Regards,
Mohammed Naveed
Hi all
Just an update on this.
I flew the drone with a 3s lipo as this was what I was using before. It flew like a charm no issues. The dshot config was disabled and set to default (PWM) for the 3s lipo.
Now coming to the 4s regardless of whether its PWM or dshot 1200 I am getting these bad oscillations on the drone. The drone can fly and maintain altitude but the oscillations are too much. I see the oscillations in the roll axis and oh boy the motor really gets hot. In 1 min flight i almost burned my hand picking up the drone.
Any thoughts what could be the issue? I am thinking its something to do with tuning the parameters.
I will share my ulogs tomorrow.
Setup used:
Motors : Emax RS2306 2400KV
ESC: T-motor F45 V2.0 4 in 1
Prop: Gemfan 5.1 x 4.99 x 3 hurricane
Lipo: 4s 1550mah 100c
Thanks & Regards,
Mohammed Naveed
Dear @Karl_Wright
After powering on your drone go to mavlink inspector and check at odometry tab whether X and Y data is non zero. if it's non zero then VIO is working.
Please refer to this document
Regards,
Mohammed Naveed