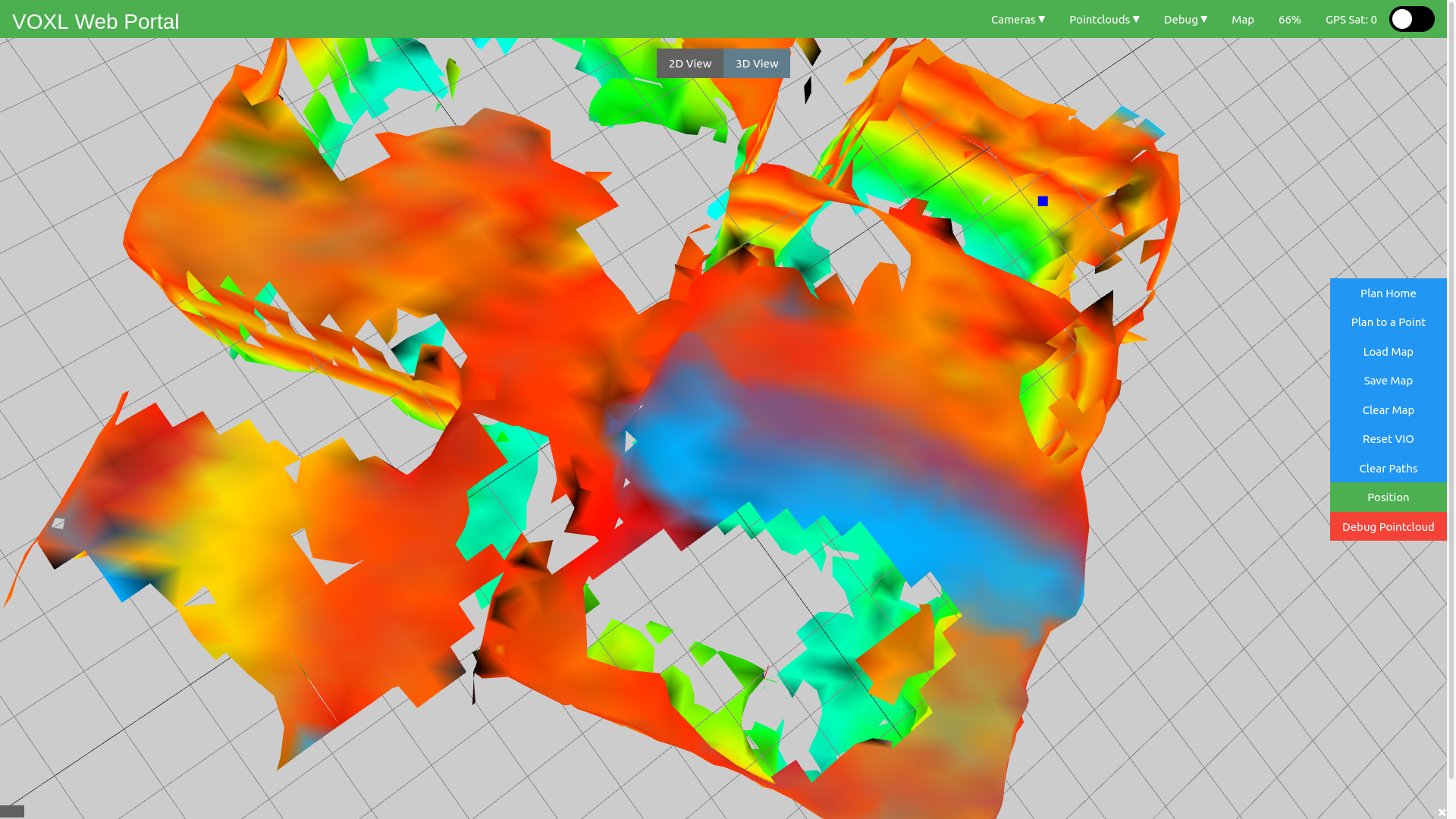
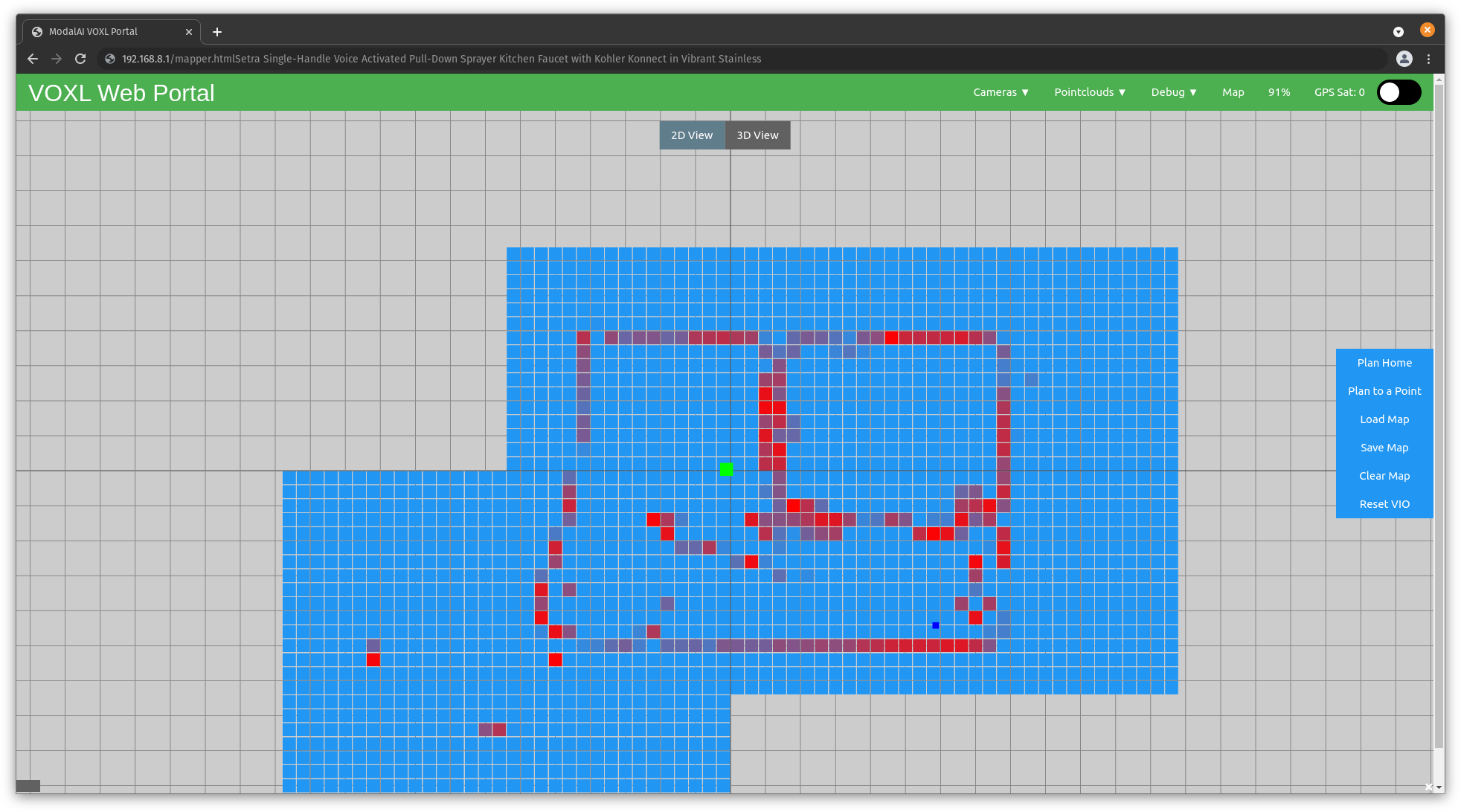
I have generated a path, though was unable to have the drone take off. Does the drone have to be in a hover state, or can it take off with the plan?
I don't have a specific preference for the camera control model, other than it's easier to use with a laptop trackpad. If i had to pick one, I'd say flycontrols.
/**
* This file contains configuration that's specific to voxl-mapper.
*/
{
"robot_radius": 0.2,
"point_skip": 7,
"voxel_size": 0.20000000298023224,
"voxels_per_side": 16,
"esdf_save_path": "/data/voxl_mapper/esdf_map",
"tsdf_save_path": "/data/voxl_mapper/tsdf_map",
"mesh_save_path": "/data/voxl_mapper/mesh.ply",
"esdf_max_distance": 4,
"esdf_min_distance": 0.20000000298023224,
"esdf_default_distance": 2,
"esdf_inner_sphere_radius": 0.20000000298023224,
"esdf_outer_sphere_radius": 0.600000023841858,
"rrt_min_distance": 0.2,
"rrt_max_runtime_nanoseconds": -1,
"rrt_use_first_solution": true,
"rrt_treat_unknown_as_occupied": true,
"rrt_send_tree": false,
"loco_num_segments": 12,
"loco_derivative_to_optimize": 3,
"loco_poly_degree": 12,
"loco_smoothness_cost_weight": 0.3,
"loco_collision_cost_weight": 12,
"loco_waypoint_cost_weight": 0.025,
"loco_min_collision_sampling_dist": 0.2,
"loco_add_waypoints": true,
"loco_scale_time": true,
"loco_split_at_collisions": true,
"loco_resample_trajectory": true,
"loco_verbose": false
}
/etc/modalai/voxl-mapper.conf