@Eric-Katzfey both cases I using just mag/gps did not takeoff , and with odometry (with/without mag/gps) did not have stability.
Do have any idea? what are the reasons?
@Eric-Katzfey both cases I using just mag/gps did not takeoff , and with odometry (with/without mag/gps) did not have stability.
Do have any idea? what are the reasons?
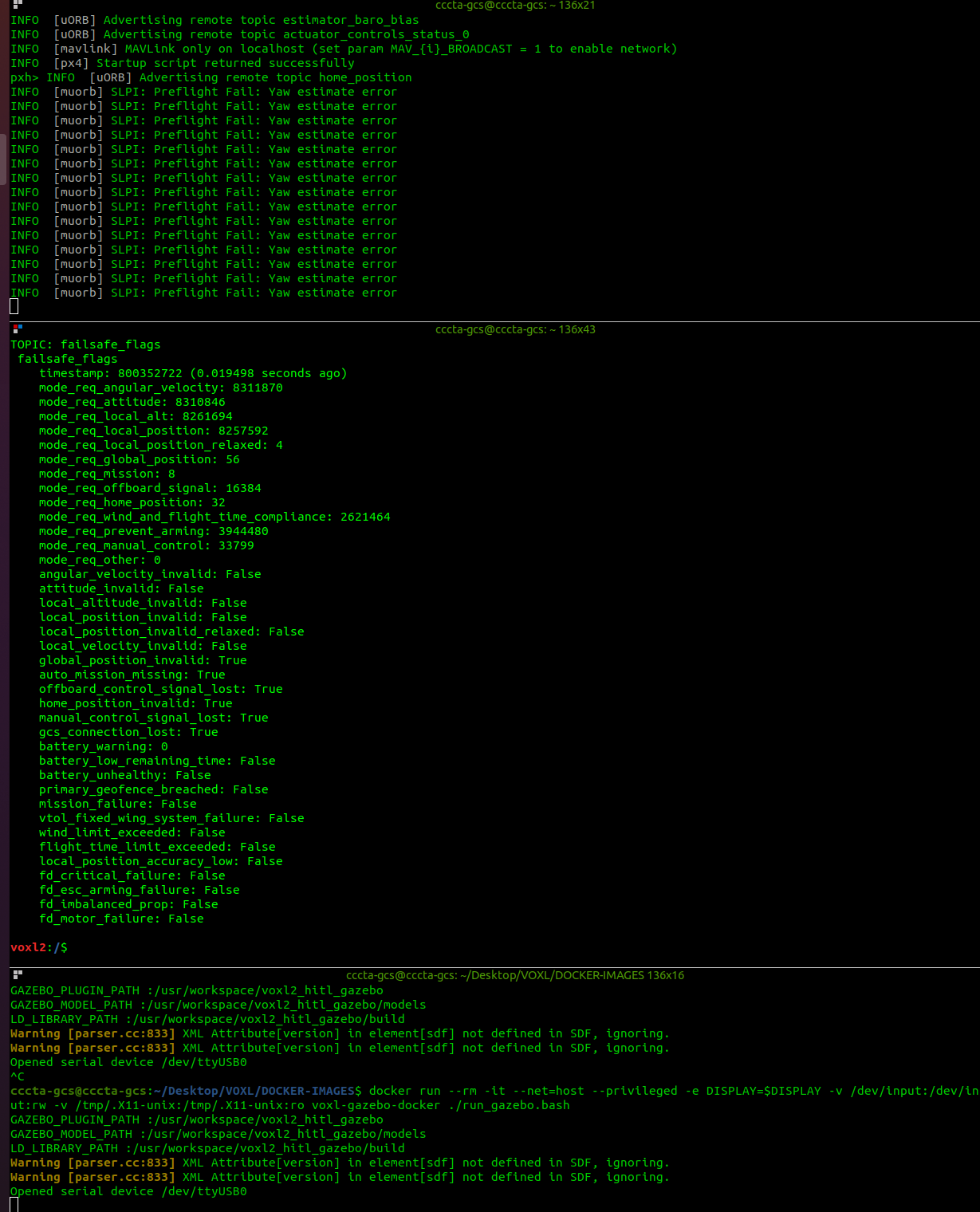
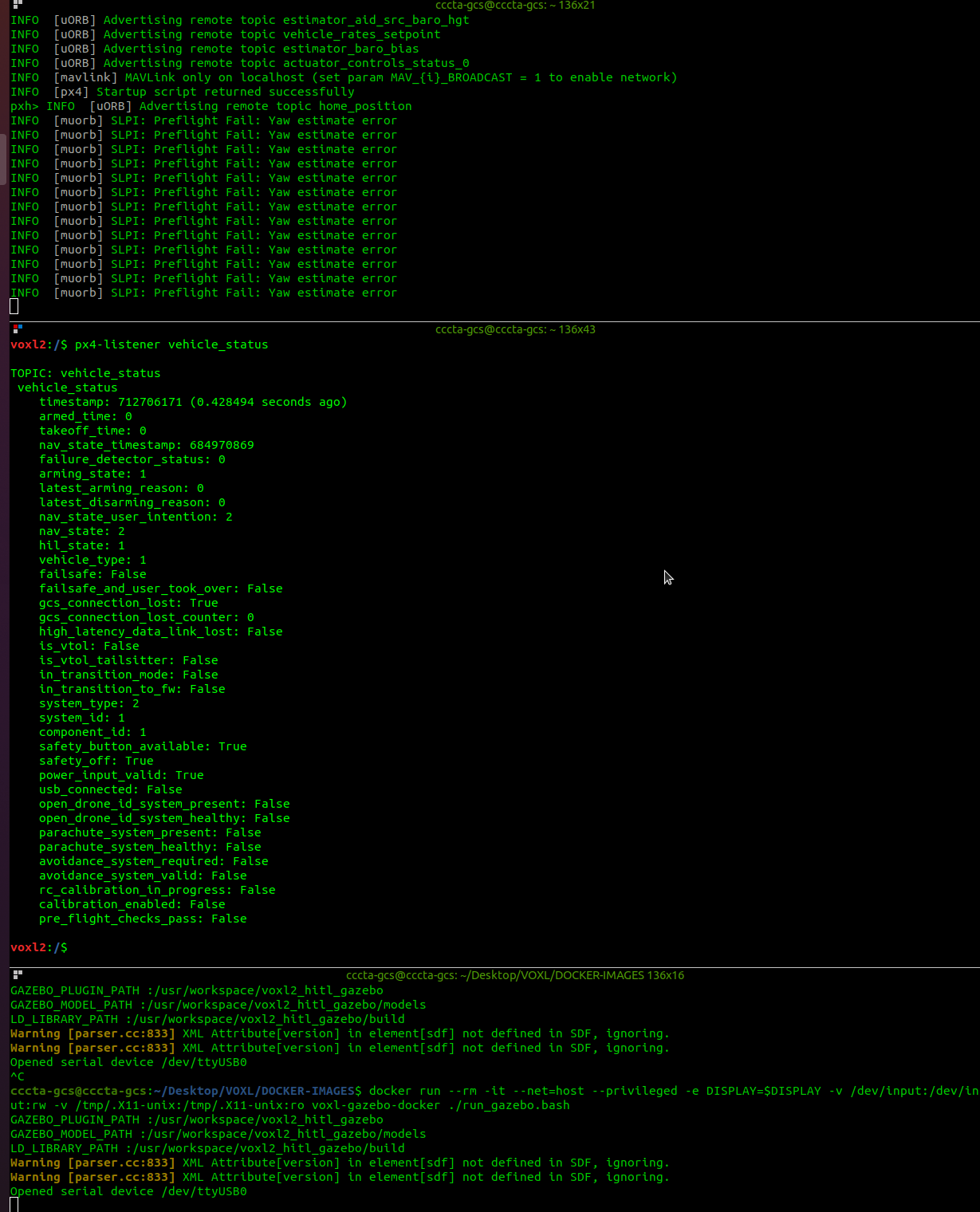
Using just -o I get the yaw estimate error all the time
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
PX4 Exiting...
pxh> Exiting NOW.
voxl2:/$ export PX4_HOME_LAT=0000.0000
voxl2:/$ export PX4_HOME_LON=0000.0000
voxl2:/$ export PX4_HOME_ALT=0000.0000
voxl2:/$ voxl-px4-hitl
Found DSP signature file
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] SLPI: muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [muorb] SLPI: Advertising remote topic log_message
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-hitl-start 0
INFO [parameters] Starting param sync THREAD
Running on M0054
INFO [muorb] SLPI: Starting param sync THREAD
INFO [muorb] SLPI: before starting the qshell_entry task
INFO [muorb] SLPI: Creating pthread qshell
INFO [muorb] SLPI: qshell entry.....
INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] SLPI: Init app map initialized
INFO [muorb] SLPI: after starting the qshell_entry task
INFO [param] selected parameter default file /data/px4/param/hitl_parameters
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic parameter_update
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 4109 bytes, decoded 4109 bytes (INT32:79, FLOAT:114)
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] /data/px4/log/2024-05-20/15_46_58.ulg
INFO [muorb] SLPI: Advertising remote topic mavlink_log
INFO [muorb] SLPI: Advertising remote topic event
INFO [logger] Opened full log file: /data/px4/log/2024-05-20/15_46_58.ulg
INFO [muorb] SLPI: Advertising remote topic logger_status
INFO [qshell] Send cmd: 'sensors start -h'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: sensors start -h
INFO [muorb] SLPI: arg0 = 'sensors'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-h'
INFO [uORB] Advertising remote topic sensor_selection
INFO [uORB] Advertising remote topic sensors_status_imu
INFO [uORB] Advertising remote topic vehicle_acceleration
INFO [uORB] Advertising remote topic vehicle_angular_velocity
INFO [uORB] Advertising remote topic sensor_combined
INFO [uORB] Advertising remote topic vehicle_air_data
INFO [muorb] SLPI: Ok executing command: sensors start -h
INFO [uORB] Advertising remote topic qshell_retval
INFO [qshell] qshell return value timestamp: 754123932, local time: 754131474
INFO [qshell] Send cmd: 'ekf2 start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ekf2 start
INFO [muorb] SLPI: arg0 = 'ekf2'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_attitude
INFO [uORB] Advertising remote topic vehicle_local_position
INFO [uORB] Advertising remote topic estimator_event_flags
INFO [uORB] Advertising remote topic estimator_innovation_test_ratios
INFO [uORB] Advertising remote topic estimator_innovation_variances
INFO [uORB] Advertising remote topic estimator_innovations
INFO [uORB] Advertising remote topic estimator_sensor_bias
INFO [uORB] Advertising remote topic estimator_states
INFO [uORB] Advertising remote topic estimator_status_flags
INFO [uORB] Advertising remote topic estimator_status
INFO [muorb] SLPI: Ok executing command: ekf2 start
INFO [qshell] qshell return value timestamp: 754536383, local time: 754541063
INFO [qshell] Send cmd: 'mc_pos_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_pos_control start
INFO [muorb] SLPI: arg0 = 'mc_pos_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic takeoff_status
INFO [muorb] SLPI: Ok executing command: mc_pos_control start
INFO [qshell] qshell return value timestamp: 754669164, local time: 754672431
INFO [qshell] Send cmd: 'mc_att_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_att_control start
INFO [muorb] SLPI: arg0 = 'mc_att_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_att_control start
INFO [qshell] qshell return value timestamp: 754745299, local time: 754748135
INFO [qshell] Send cmd: 'mc_rate_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_rate_control start
INFO [muorb] SLPI: arg0 = 'mc_rate_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic rate_ctrl_status
INFO [muorb] SLPI: Ok executing command: mc_rate_control start
INFO [qshell] qshell return value timestamp: 754875390, local time: 754878249
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start
INFO [muorb] SLPI: arg0 = 'mc_hover_thrust_estimator'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start
INFO [qshell] qshell return value timestamp: 754923562, local time: 754926616
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_autotune_attitude_control start
INFO [muorb] SLPI: arg0 = 'mc_autotune_attitude_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic autotune_attitude_control_status
INFO [muorb] SLPI: Ok executing command: mc_autotune_attitude_control start
INFO [qshell] qshell return value timestamp: 754987805, local time: 754991271
INFO [qshell] Send cmd: 'land_detector start multicopter'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: land_detector start multicopter
INFO [muorb] SLPI: arg0 = 'land_detector'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = 'multicopter'
INFO [muorb] SLPI: Ok executing command: land_detector start multicopter
INFO [qshell] qshell return value timestamp: 755042360, local time: 755044865
INFO [qshell] Send cmd: 'manual_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: manual_control start
INFO [muorb] SLPI: arg0 = 'manual_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: manual_control start
INFO [qshell] qshell return value timestamp: 755087130, local time: 755089796
INFO [uORB] Advertising remote topic manual_control_setpoint
INFO [uORB] Advertising remote topic vehicle_land_detected
INFO [qshell] Send cmd: 'control_allocator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: control_allocator start
INFO [muorb] SLPI: arg0 = 'control_allocator'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic control_allocator_status
INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_motors
INFO [uORB] Advertising remote topic actuator_servos
INFO [uORB] Advertising remote topic actuator_servos_trim
INFO [muorb] SLPI: Ok executing command: control_allocator start
INFO [qshell] qshell return value timestamp: 755468579, local time: 755470589
INFO [qshell] Send cmd: 'rc_update start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: rc_update start
INFO [muorb] SLPI: arg0 = 'rc_update'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: rc_update start
INFO [qshell] qshell return value timestamp: 755849262, local time: 755851518
INFO [qshell] Send cmd: 'commander start -h'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander start -h
INFO [muorb] SLPI: arg0 = 'commander'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-h'
INFO [muorb] SLPI: Creating pthread commander
INFO [muorb] SLPI: Successfully created px4 task PX4_commander with tid 2097647
INFO [uORB] Advertising remote topic led_control
INFO [muorb] SLPI: LED: open /dev/led0 failed (22)
INFO [uORB] Advertising remote topic tune_control
INFO [muorb] SLPI: Ok executing command: commander start -h
INFO [qshell] qshell return value timestamp: 756119900, local time: 756121221
INFO [muorb] SLPI: Preflight Fail: Accel Sensor 0 missing
INFO [muorb] SLPI: Preflight Fail: barometer 0 missing
INFO [muorb] SLPI: Preflight Fail: ekf2 missing data
INFO [muorb] SLPI: Preflight Fail: Gyro Sensor 0 missing
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [qshell] Send cmd: 'commander mode posctl'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander mode posctl
INFO [muorb] SLPI: arg0 = 'commander'
INFO [muorb] SLPI: arg1 = 'mode'
INFO [muorb] SLPI: arg2 = 'posctl'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] SLPI: Ok executing command: commander mode posctl
INFO [qshell] qshell return value timestamp: 756161492, local time: 756163381
INFO [uORB] Advertising remote topic vehicle_command_ack
INFO [qshell] Send cmd: 'load_mon start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: load_mon start
INFO [muorb] SLPI: arg0 = 'load_mon'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: load_mon start
INFO [uORB] Advertising remote topic cpuload
INFO [qshell] qshell return value timestamp: 756209650, local time: 756212110
INFO [qshell] Send cmd: 'flight_mode_manager start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: flight_mode_manager start
INFO [muorb] SLPI: arg0 = 'flight_mode_manager'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
INFO [muorb] SLPI: Ok executing command: flight_mode_manager start
INFO [qshell] qshell return value timestamp: 756337917, local time: 756339906
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] SLPI: Advertising remote topic transponder_report
INFO [muorb] SLPI: Advertising remote topic rtl_time_estimate
INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet
INFO [qshell] Send cmd: 'pwm_out_sim start -m hil'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: pwm_out_sim start -m hil
INFO [muorb] SLPI: arg0 = 'pwm_out_sim'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-m'
INFO [muorb] SLPI: arg3 = 'hil'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [muorb] SLPI: Ok executing command: pwm_out_sim start -m hil
INFO [qshell] qshell return value timestamp: 757571489, local time: 757574531
--------------------------------------------------------
--------------------------------------------------------
------------- RUNNING JUST THE ODOMETRY!!! -------------
--------------------------------------------------------
--------------------------------------------------------
INFO [uORB] Advertising remote topic actuator_outputs_sim
INFO [qshell] Send cmd: 'dsp_hitl start -o'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: dsp_hitl start -o
INFO [muorb] SLPI: arg0 = 'dsp_hitl'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-o'
INFO [muorb] SLPI: Creating pthread dsp_hitl__main
INFO [muorb] SLPI: Successfully created px4 task PX4_dsp_hitl__main with tid 2097645
INFO [muorb] SLPI: Ok executing command: dsp_hitl start -o
INFO [muorb] SLPI: DSP HITL Serial Port is open: 0
INFO [uORB] Advertising remote topic sensor_accel
INFO [qshell] qshell return value timestamp: 757621699, local time: 757622539
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] SLPI: Got 5 from orb_subscribe
INFO [uORB] Advertising remote topic esc_status
INFO [uORB] Advertising remote topic battery_status
INFO [uORB] Advertising remote topic vehicle_visual_odometry
INFO [uORB] Advertising remote topic sensor_baro
INFO [uORB] Advertising remote topic vehicle_imu
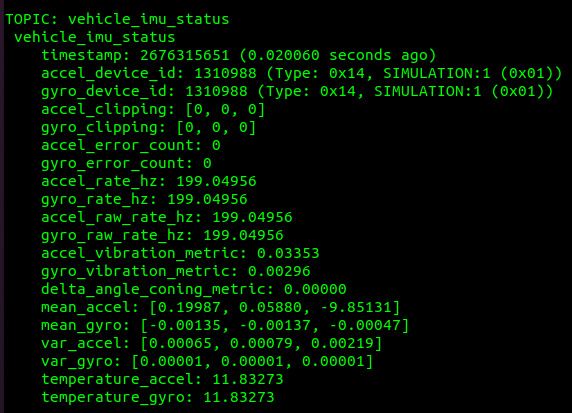
INFO [uORB] Advertising remote topic vehicle_imu_status
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_odometry
INFO [uORB] Advertising remote topic vehicle_local_position_setpoint
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos
INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos
INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel
INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw
INFO [uORB] Advertising remote topic estimator_aid_src_gravity
INFO [uORB] Advertising remote topic ekf2_timestamps
INFO [uORB] Advertising remote topic trajectory_setpoint
INFO [uORB] Advertising remote topic vehicle_constraints
INFO [uORB] Advertising remote topic landing_gear
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] SLPI: Advertising remote topic telemetry_status
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] SLPI: Advertising remote topic offboard_control_mode
INFO [muorb] SLPI: Advertising remote topic obstacle_distance
INFO [muorb] SLPI: Advertising remote topic timesync_status
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] SLPI: Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [mavlink] partner IP: 127.0.0.1
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [uORB] Advertising remote topic sensors_status_baro
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt
INFO [muorb] SLPI: Advertising remote topic camera_status
INFO [uORB] Advertising remote topic estimator_baro_bias
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [uORB] Advertising remote topic home_position
INFO [muorb] SLPI: Advertising remote topic ping
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
pxh> INFO [muorb] SLPI: Preflight Fail: Yaw estimate error INFO [muorb] SLPI: Preflight Fail: Yaw estimate error INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
INFO [muorb] SLPI: Preflight Fail: Yaw estimate error
hey @Eric-Katzfey
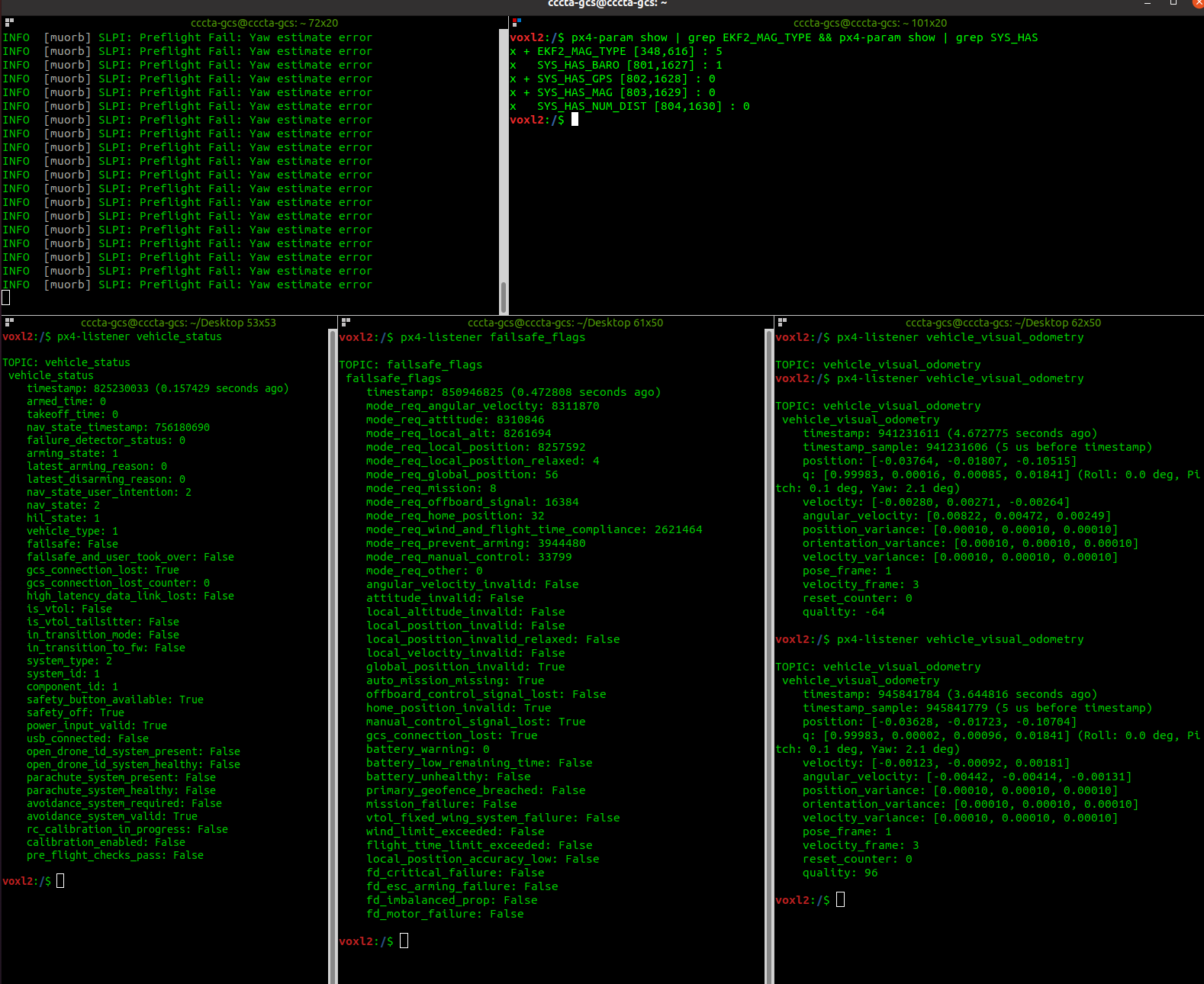
Using GPS/MAG in case -g -m, its stopped to warning the pre-flight check of yaw estimate error, however I noticed seems missing params.
voxl2:/$ voxl-px4-hitl
Found DSP signature file
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] SLPI: muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORB
INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-hitl-start 0
INFO [parameters] Starting param sync THREAD
INFO [muorb] SLPI: Advertising remote topic log_message
Running on M0054
INFO [muorb] SLPI: Starting param sync THREAD
INFO [muorb] SLPI: before starting the qshell_entry task
INFO [muorb] SLPI: Creating pthread qshell
INFO [muorb] SLPI: qshell entry.....
INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] SLPI: Init app map initialized
INFO [muorb] SLPI: after starting the qshell_entry task
INFO [param] selected parameter default file /data/px4/param/hitl_parameters
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic parameter_update
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 4109 bytes, decoded 4109 bytes (INT32:79, FLOAT:114)
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] /data/px4/log/2024-05-20/16_01_02.ulg
INFO [muorb] SLPI: Advertising remote topic mavlink_log
INFO [muorb] SLPI: Advertising remote topic event
INFO [logger] Opened full log file: /data/px4/log/2024-05-20/16_01_02.ulg
INFO [muorb] SLPI: Advertising remote topic logger_status
INFO [qshell] Send cmd: 'sensors start -h'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: sensors start -h
INFO [muorb] SLPI: arg0 = 'sensors'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-h'
INFO [uORB] Advertising remote topic sensor_selection
INFO [uORB] Advertising remote topic sensors_status_imu
INFO [uORB] Advertising remote topic vehicle_acceleration
INFO [uORB] Advertising remote topic vehicle_angular_velocity
INFO [uORB] Advertising remote topic sensor_combined
INFO [uORB] Advertising remote topic vehicle_air_data
INFO [muorb] SLPI: Ok executing command: sensors start -h
INFO [uORB] Advertising remote topic qshell_retval
INFO [qshell] qshell return value timestamp: 1597879835, local time: 1597887360
INFO [qshell] Send cmd: 'ekf2 start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ekf2 start
INFO [muorb] SLPI: arg0 = 'ekf2'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_attitude
INFO [uORB] Advertising remote topic vehicle_local_position
INFO [uORB] Advertising remote topic estimator_event_flags
INFO [uORB] Advertising remote topic estimator_innovation_test_ratios
INFO [uORB] Advertising remote topic estimator_innovation_variances
INFO [uORB] Advertising remote topic estimator_innovations
INFO [uORB] Advertising remote topic estimator_sensor_bias
INFO [uORB] Advertising remote topic estimator_states
INFO [uORB] Advertising remote topic estimator_status_flags
INFO [uORB] Advertising remote topic estimator_status
INFO [muorb] SLPI: Ok executing command: ekf2 start
INFO [qshell] qshell return value timestamp: 1598279802, local time: 1598282277
INFO [qshell] Send cmd: 'mc_pos_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_pos_control start
INFO [muorb] SLPI: arg0 = 'mc_pos_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic takeoff_status
INFO [muorb] SLPI: Ok executing command: mc_pos_control start
INFO [qshell] qshell return value timestamp: 1598401731, local time: 1598403944
INFO [qshell] Send cmd: 'mc_att_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_att_control start
INFO [muorb] SLPI: arg0 = 'mc_att_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_att_control start
INFO [qshell] qshell return value timestamp: 1598464342, local time: 1598467697
INFO [qshell] Send cmd: 'mc_rate_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_rate_control start
INFO [muorb] SLPI: arg0 = 'mc_rate_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic rate_ctrl_status
INFO [muorb] SLPI: Ok executing command: mc_rate_control start
INFO [qshell] qshell return value timestamp: 1598592592, local time: 1598595052
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start
INFO [muorb] SLPI: arg0 = 'mc_hover_thrust_estimator'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start
INFO [qshell] qshell return value timestamp: 1598667266, local time: 1598670137
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_autotune_attitude_control start
INFO [muorb] SLPI: arg0 = 'mc_autotune_attitude_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic autotune_attitude_control_status
INFO [muorb] SLPI: Ok executing command: mc_autotune_attitude_control start
INFO [qshell] qshell return value timestamp: 1598716330, local time: 1598718644
INFO [qshell] Send cmd: 'land_detector start multicopter'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: land_detector start multicopter
INFO [muorb] SLPI: arg0 = 'land_detector'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = 'multicopter'
INFO [muorb] SLPI: Ok executing command: land_detector start multicopter
INFO [qshell] qshell return value timestamp: 1598767502, local time: 1598769992
INFO [qshell] Send cmd: 'manual_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: manual_control start
INFO [muorb] SLPI: arg0 = 'manual_control'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_land_detected
INFO [muorb] SLPI: Ok executing command: manual_control start
INFO [qshell] qshell return value timestamp: 1598825243, local time: 1598828079
INFO [uORB] Advertising remote topic manual_control_setpoint
INFO [qshell] Send cmd: 'control_allocator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: control_allocator start
INFO [muorb] SLPI: arg0 = 'control_allocator'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic control_allocator_status
INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_motors
INFO [uORB] Advertising remote topic actuator_servos
INFO [uORB] Advertising remote topic actuator_servos_trim
INFO [muorb] SLPI: Ok executing command: control_allocator start
INFO [qshell] qshell return value timestamp: 1599211146, local time: 1599212999
INFO [qshell] Send cmd: 'rc_update start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: rc_update start
INFO [muorb] SLPI: arg0 = 'rc_update'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: rc_update start
INFO [qshell] qshell return value timestamp: 1599596741, local time: 1599602277
INFO [qshell] Send cmd: 'commander start -h'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander start -h
INFO [muorb] SLPI: arg0 = 'commander'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-h'
INFO [muorb] SLPI: Creating pthread commander
INFO [muorb] SLPI: Successfully created px4 task PX4_commander with tid 2097647
INFO [uORB] Advertising remote topic led_control
INFO [muorb] SLPI: LED: open /dev/led0 failed (22)
INFO [uORB] Advertising remote topic tune_control
**INFO [muorb] SLPI: Ok executing command: commander start -h
INFO [qshell] qshell return value timestamp: 1599865670, local time: 1599867387
INFO [muorb] SLPI: Preflight Fail: Accel Sensor 0 missing
INFO [muorb] SLPI: Preflight Fail: barometer 0 missing
INFO [muorb] SLPI: Preflight Fail: ekf2 missing data
INFO [muorb] SLPI: Preflight Fail: Gyro Sensor 0 missing**
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [qshell] Send cmd: 'commander mode posctl'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander mode posctl
INFO [muorb] SLPI: arg0 = 'commander'
INFO [muorb] SLPI: arg1 = 'mode'
INFO [muorb] SLPI: arg2 = 'posctl'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] SLPI: Ok executing command: commander mode posctl
INFO [qshell] qshell return value timestamp: 1599909239, local time: 1599912144
INFO [uORB] Advertising remote topic vehicle_command_ack
INFO [qshell] Send cmd: 'load_mon start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: load_mon start
INFO [muorb] SLPI: arg0 = 'load_mon'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: load_mon start
INFO [uORB] Advertising remote topic cpuload
INFO [qshell] qshell return value timestamp: 1599943912, local time: 1599946598
INFO [qshell] Send cmd: 'flight_mode_manager start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: flight_mode_manager start
INFO [muorb] SLPI: arg0 = 'flight_mode_manager'
INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
INFO [muorb] SLPI: Ok executing command: flight_mode_manager start
INFO [qshell] qshell return value timestamp: 1600088995, local time: 1600091860
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] SLPI: Advertising remote topic transponder_report
INFO [muorb] SLPI: Advertising remote topic rtl_time_estimate
INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet
INFO [qshell] Send cmd: 'pwm_out_sim start -m hil'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: pwm_out_sim start -m hil
INFO [muorb] SLPI: arg0 = 'pwm_out_sim'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-m'
INFO [muorb] SLPI: arg3 = 'hil'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [muorb] SLPI: Ok executing command: pwm_out_sim start -m hil
INFO [qshell] qshell return value timestamp: 1601306980, local time: 1601309848
--------------------------------------------------------
--------------------------------------------------------
------------- RUNNING JUST THE GPS/MAG!!! -------------
INFO [uORB] Advertising remote topic actuator_outputs_sim
--------------------------------------------------------
--------------------------------------------------------
INFO [qshell] Send cmd: 'dsp_hitl start -g -m'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: dsp_hitl start -g -m
INFO [muorb] SLPI: arg0 = 'dsp_hitl'
INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-g'
INFO [muorb] SLPI: arg3 = '-m'
INFO [muorb] SLPI: Creating pthread dsp_hitl__main
INFO [muorb] SLPI: Successfully created px4 task PX4_dsp_hitl__main with tid 2097645
INFO [muorb] SLPI: Ok executing command: dsp_hitl start -g -m
INFO [muorb] SLPI: DSP HITL Serial Port is open: 0
INFO [uORB] Advertising remote topic sensor_accel
INFO [qshell] qshell return value timestamp: 1601353759, local time: 1601354484
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] SLPI: Got 5 from orb_subscribe
INFO [uORB] Advertising remote topic esc_status
INFO [uORB] Advertising remote topic battery_status
INFO [uORB] Advertising remote topic sensor_mag
INFO [uORB] Advertising remote topic sensor_baro
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] SLPI: Advertising remote topic telemetry_status
INFO [uORB] Advertising remote topic vehicle_imu
INFO [uORB] Advertising remote topic vehicle_imu_status
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_odometry
INFO [uORB] Advertising remote topic vehicle_local_position_setpoint
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos
INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_gravity
INFO [uORB] Advertising remote topic ekf2_timestamps
INFO [uORB] Advertising remote topic trajectory_setpoint
INFO [uORB] Advertising remote topic vehicle_constraints
INFO [uORB] Advertising remote topic landing_gear
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] SLPI: Advertising remote topic obstacle_distance
INFO [muorb] SLPI: Advertising remote topic offboard_control_mode
INFO [muorb] SLPI: Advertising remote topic timesync_status
INFO [uORB] Advertising remote topic sensor_gps
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] SLPI: Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [mavlink] partner IP: 127.0.0.1
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [uORB] Advertising remote topic sensors_status_baro
INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt
INFO [muorb] SLPI: Advertising remote topic camera_status
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [muorb] SLPI: Advertising remote topic ping
pxh> qshell commander takeoff
INFO [qshell] Send cmd: 'commander takeoff'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander takeoff
INFO [muorb] SLPI: arg0 = 'commander'
INFO [muorb] SLPI: arg1 = 'takeoff'
INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
INFO [muorb] SLPI: Ok executing command: commander takeoff
INFO [qshell] qshell return value timestamp: 1681880057, local time: 1681883664
pxh> INFO [muorb] SLPI: Armed by internal command
INFO [navigator] Using minimum takeoff altitude: 3.00 m
INFO [muorb] SLPI: Marking DeviceNode(mavlink_log) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic mission_result
WARN [mavlink] Event dropped (25, 65527)
WARN [mavlink] Event dropped (25, 65527)
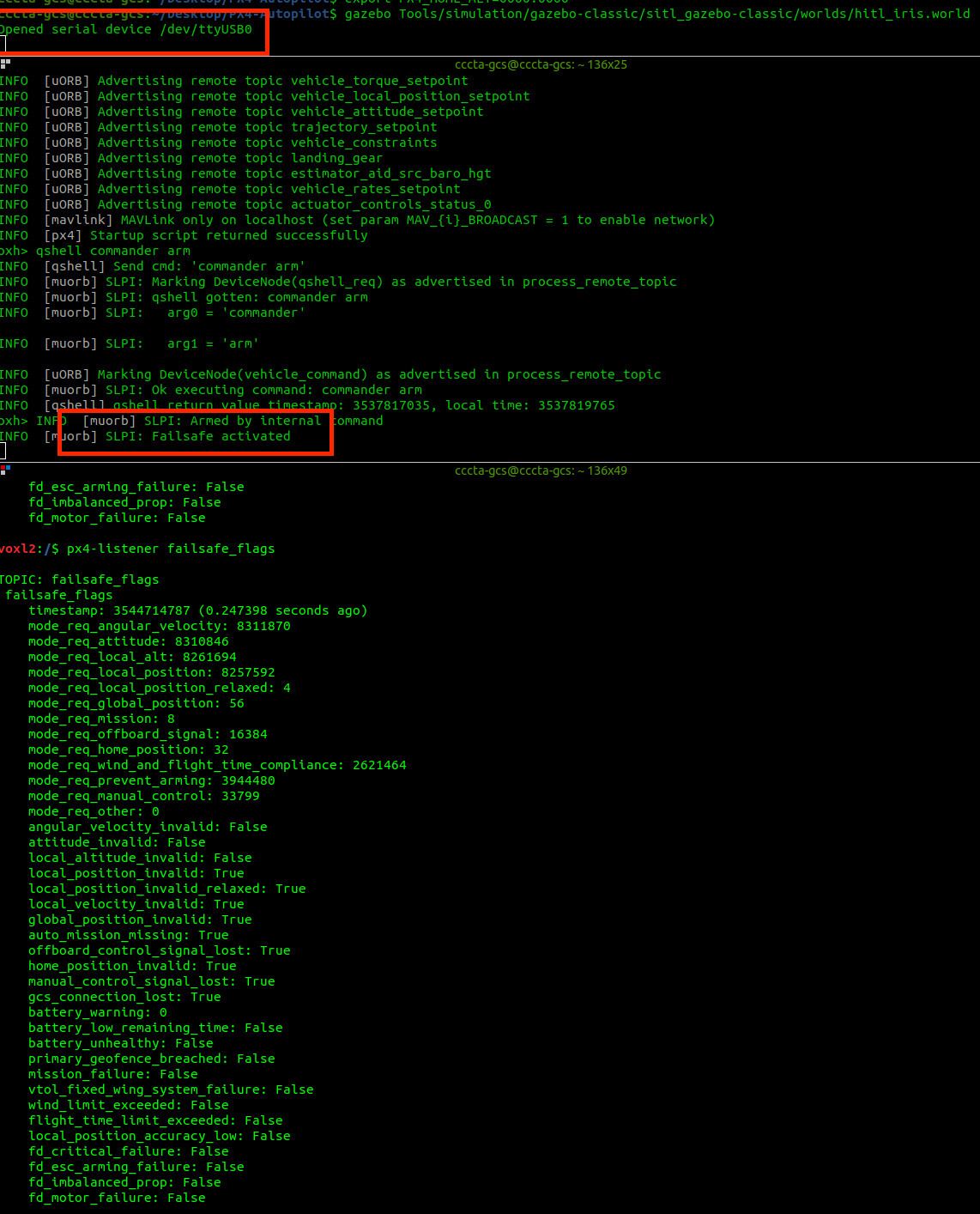
INFO [muorb] SLPI: Failsafe activated
WARN [mavlink] Dropped 65502 events (seq=65527)
WARN [mavlink] Dropped 65502 events (seq=65527)
WARN [mavlink] Event dropped (65528, 25)
WARN [mavlink] Dropped 15 events (seq=25)
WARN [mavlink] Event dropped (65528, 25)
WARN [mavlink] Dropped 15 events (seq=25)
Hi Eric, this is my first time doing any setup with HITL.
I'm using the standard voxl-px4-hitl-start file, on the host computer it apparently opens communication with the usb, I send the command to arm the drone and when I tried the first time, it still tookoff, without showing any stability, now it triggers the failsafe and doesn't even takeoff.
Do you have any suggestions as to how I could approach it better? As it's my first time, I'm a bit lost as to how to debug in this case.
ps: I'm not using GPS
voxl-px4-hitl-start

During the execution of voxl-px4-hitl
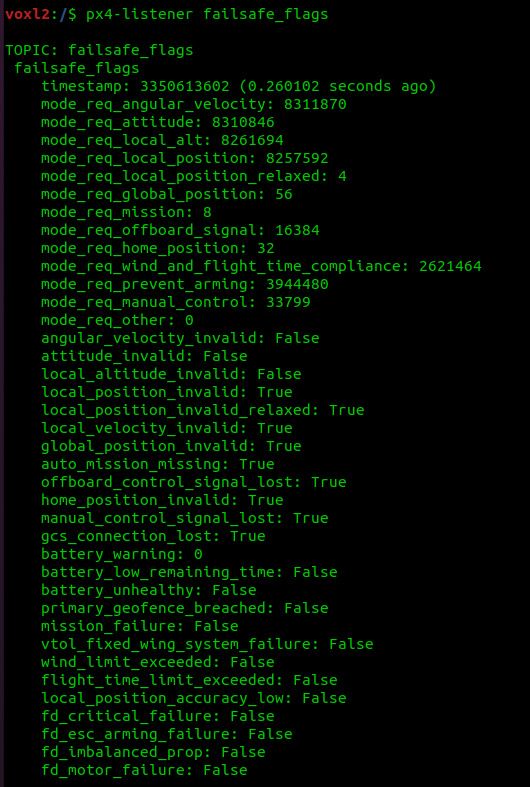
Failsafe triggered
@Eric-Katzfey said in VOXL2 - HITL/VIO:
qshell dsp_hitl status
I runned the command , but seems it's ok.
What could I check? What do you suggest?@Eric-Katzfey
Hey guys !
I want to run PX4-HITL using VIO, but I'm running into some problems.
I was able to create the communication with the FTDI cable, but using the docker image or using gazebo on my computer I had problems with the pre-flights checks.
I also had problems with QGC, which kept alerting me to an unknown mode-
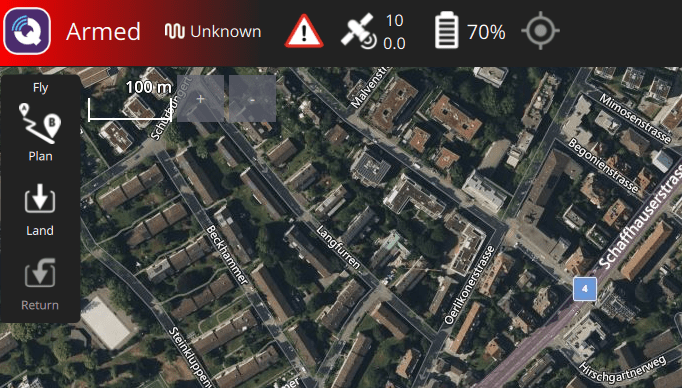
The data presented was strange
The version of the sdk and packages are:
I used as reference :
https://docs.modalai.com/voxl2-PX4-hitl/
I would like to know if there are any additional steps for the parameters with VIO and what would be the correct way to execute VOXL-PX4-HITL.
@Eric-Katzfey thanks mate for your answer!
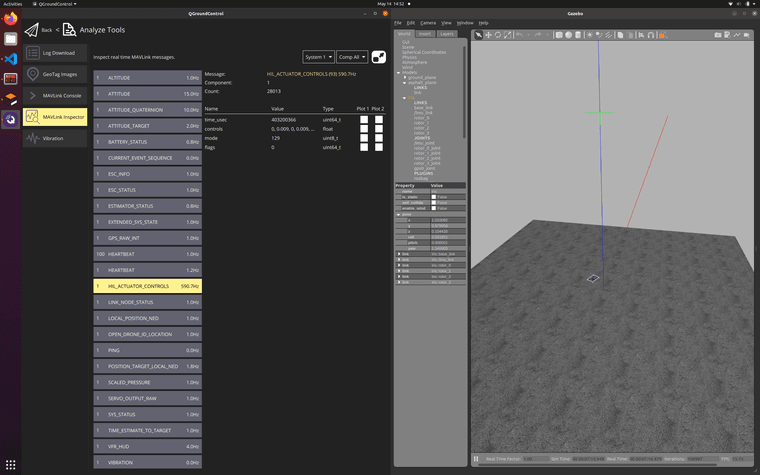
I'm missing the odometry message (ID 331) in QGC after updating the system to version 1.1.3.
I loaded the parameters (Indoor VIO Missing GPS) :

PX4 parameter files for use on VOXL2 and Flight Core

GitLab (gitlab.com)
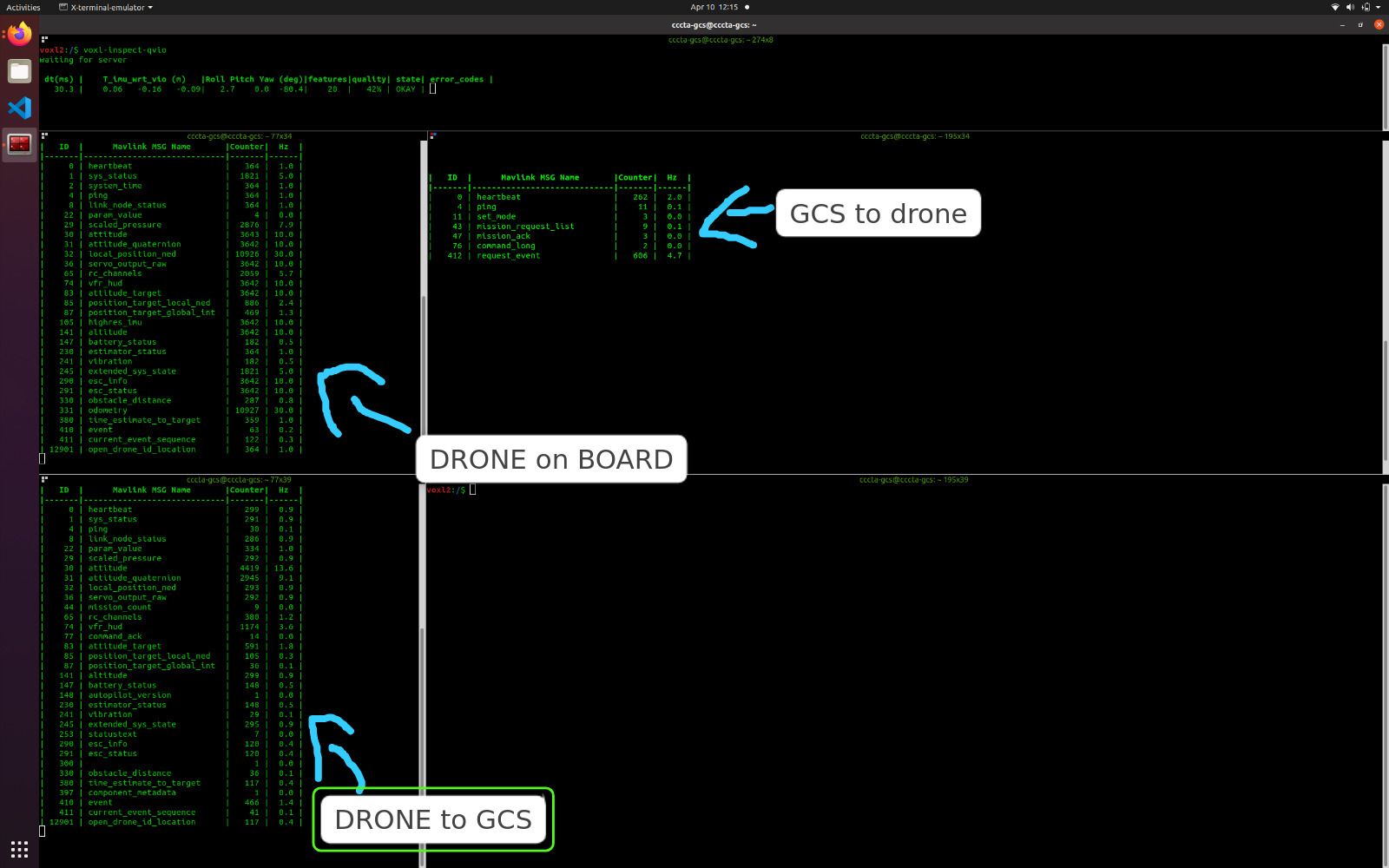
However, when I use the voxl-inspect-qvio service (and take measurements with markings on the ground, the coordinates are correct/within tolerance).
When I call the service:
voxl-inspect-mavlink mavlink_onboard
The odometry message is there, but when I call
voxl-inspect-mavlink mavlink_to_gcs
Which of course reflects what is appearing in QGC (there is no odometry message, only local_position_ned).
So we're not supposed to have the odometry message in these new versions? Mainly because the PX4 v1.14 firmware no longer supports the EKF2_AID_MASK parameters, among others.
I really want to answer this question, especially to find out if I can fly autonomously.
Hi Alex,
When I tested was with the px4 running.
That apps you said is like this?
https://docs.px4.io/main/en/modules/hello_sky.html
I’m still learning some parts of px4 itself  .
.
Ideally, I thought to connect the esp to cpu where I could to read the data coming , such as to connect a arduino board in a computer. However to control the gimbal should be using mavlink .
It’s like to learn to use the peripherals of my sentinel, because in the future I need also to connect UART lidar.
What do you recommend? Because the others UARTs ports that I have are full right now.
Best regards!
hi guys!
I have a very dumb question.
I'd like to develop a gimbal using uart communication. But since I'd already removed the GPS module, I thought I'd use these uart ports.
I tried connecting an ESP32 to J19 of the VOXL2 (PINOS: #2-TX, #3-RX, #6-GND) and checking communication using the qrb5165io-uart-test and qrb5165io-slpi-uart-test commands.
I also checked this link:

ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
Could you please guide me?!
Thank you!
Hi guys,
I would like to know if it is possible to assign an switch to my RC Spektrum DX6 to land the Sentinel drone.
Best Regards,
Leonardo Andrade.
@Alex-Kushleyev Thanks mate!
Good Morning guys,
I would like to know how could I test my own VIO algorithms on sentinel drone.
Best Regards!
Hello everyone!
I'm trying to get information and spin engines, like a checklist for the drone's verification to maintenance from VOXL-PORTAL.
So, i was reading the js file called "JParser" and others html files, I would like to know where can find the request messages
var parser = new jParser(msg, {
msg_type: {
index: 'uint8',
},
status_text_msg: {
status_text: ['array', 'char', 127],
},
fm_msg: {
armed: 'uint8',
num_sats: 'uint8',
base_mode: 'uint8',
custom_mode: 'uint32',
batt_remaining: 'uint8',
}});
As shown above the "fm_msg" and "status_text_msg" are the messages, but where can I find this list or how can I request it to controller?
thanks for all!
@Eric-Katzfey thanks mate! 
@Eric-Katzfey , I was trying to develop a test platform, to spin the motors and monitoring others variables. Is it not possible right now?
Hey guys,
I was looking for the voxl-portal and I started to think if is possible to send commands MAVLINK/PX4 or parts of the QGC duty be transferred to there.
Someone can leave me clear, please 
Thanks