ODOMETRY MESSAGE
-
I'm missing the odometry message (ID 331) in QGC after updating the system to version 1.1.3.
I loaded the parameters (Indoor VIO Missing GPS) :

params/v1.14/EKF2_helpers/indoor_vio_missing_gps.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core

GitLab (gitlab.com)
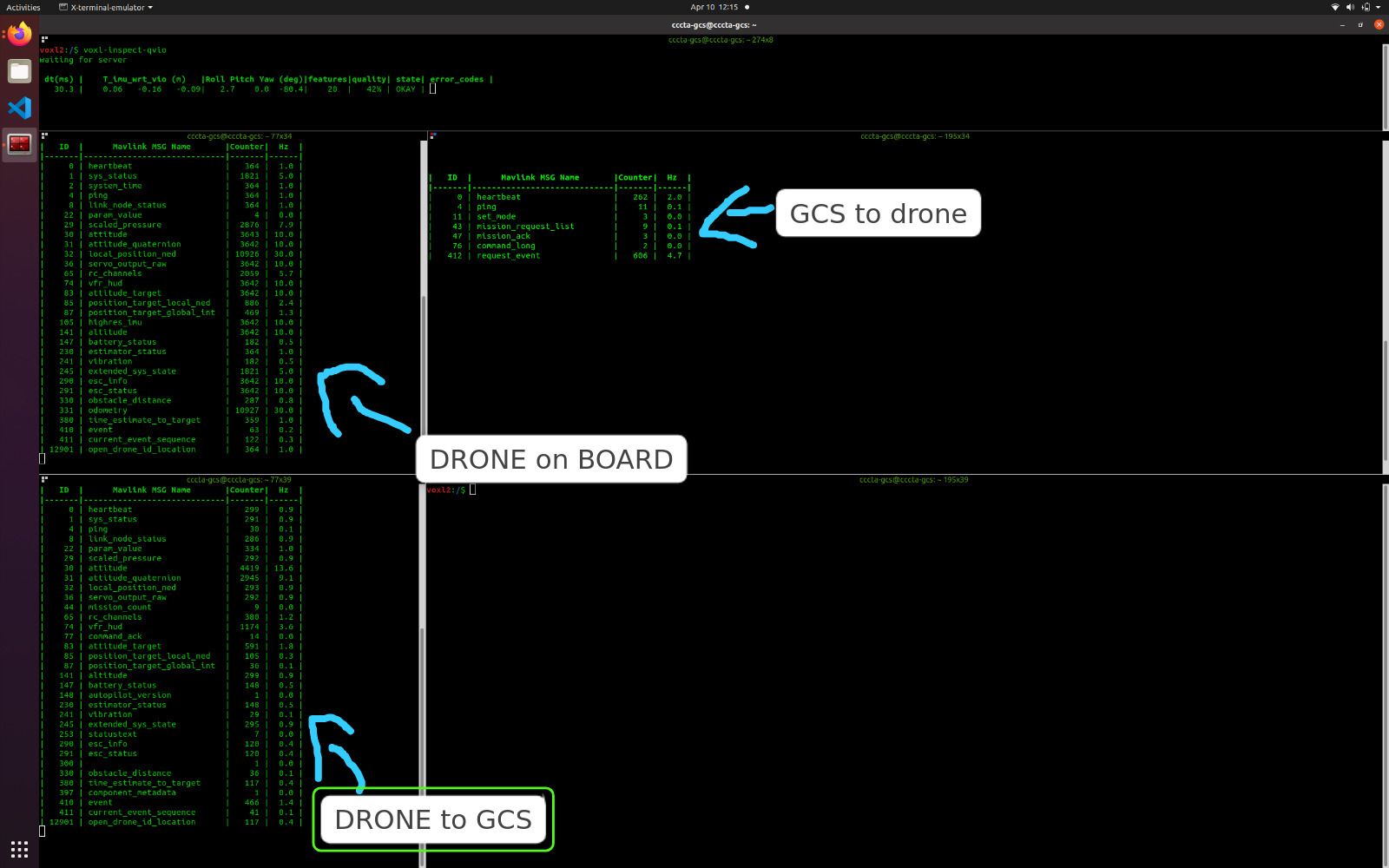
However, when I use the voxl-inspect-qvio service (and take measurements with markings on the ground, the coordinates are correct/within tolerance).
When I call the service:
voxl-inspect-mavlink mavlink_onboardThe odometry message is there, but when I call
voxl-inspect-mavlink mavlink_to_gcs
Which of course reflects what is appearing in QGC (there is no odometry message, only local_position_ned).
So we're not supposed to have the odometry message in these new versions? Mainly because the PX4 v1.14 firmware no longer supports the EKF2_AID_MASK parameters, among others.
I really want to answer this question, especially to find out if I can fly autonomously.
-
I'm missing the odometry message (ID 331) in QGC after updating the system to version 1.1.3.
I loaded the parameters (Indoor VIO Missing GPS) :
params/v1.14/EKF2_helpers/indoor_vio_missing_gps.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core
GitLab (gitlab.com)
However, when I use the voxl-inspect-qvio service (and take measurements with markings on the ground, the coordinates are correct/within tolerance).
When I call the service:
voxl-inspect-mavlink mavlink_onboardThe odometry message is there, but when I call
voxl-inspect-mavlink mavlink_to_gcs
Which of course reflects what is appearing in QGC (there is no odometry message, only local_position_ned).
So we're not supposed to have the odometry message in these new versions? Mainly because the PX4 v1.14 firmware no longer supports the EKF2_AID_MASK parameters, among others.
I really want to answer this question, especially to find out if I can fly autonomously.
@leonardo-Andrade-0 The startup script
/usr/bin/voxl-px4-startcontrols the startup of the mavlink instances. The mavlink instance that sends messages to QGC enablesnormalmode which does not include the odometry message. But you can see in that script how you can add extra streams. So, you can add odometry with something like this:mavlink start -x -u 14558 -o 14559 -r 100000 -n lo mavlink stream -u 14558 -s ODOMETRY -r 30 -
 E Eric Katzfey referenced this topic on
E Eric Katzfey referenced this topic on
-
@leonardo-Andrade-0 The startup script
/usr/bin/voxl-px4-startcontrols the startup of the mavlink instances. The mavlink instance that sends messages to QGC enablesnormalmode which does not include the odometry message. But you can see in that script how you can add extra streams. So, you can add odometry with something like this:mavlink start -x -u 14558 -o 14559 -r 100000 -n lo mavlink stream -u 14558 -s ODOMETRY -r 30@Eric-Katzfey thanks mate for your answer!
-
E Eric Katzfey referenced this topic
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login