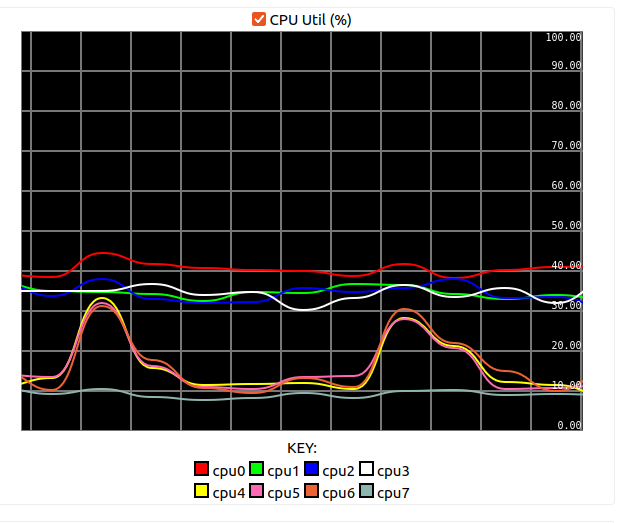
@tom Is there a way to voxl-logger the outputs from voxl-inspect-cpu and play it so that I can see the graphs on voxl-portal? Currently I can only voxl-inspect-cpu or view the graphs in real-time on voxl-portal, but I would like to record the data when the drone flies and review it post-flight
K
kerct
@kerct
Posts
-
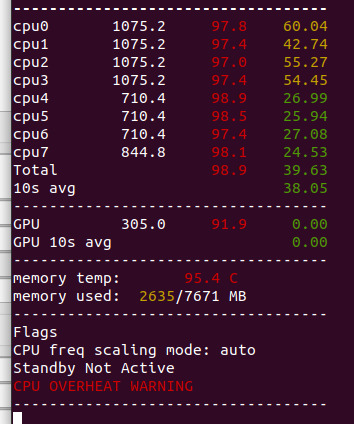
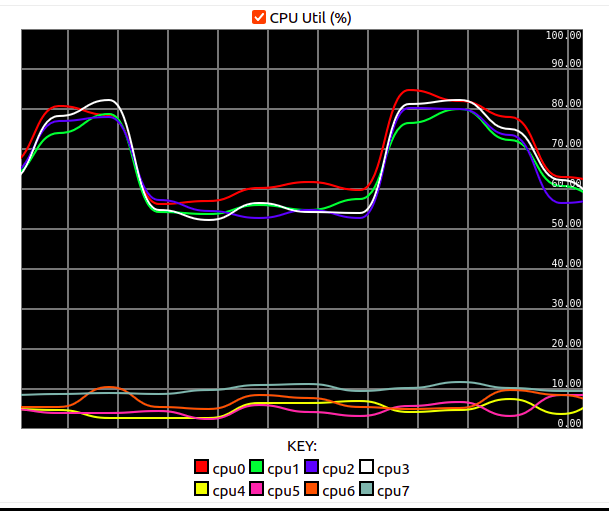
CPU Temperature Logging -
cpu 0 to 3 vs 4 to 7@Moderator oh I see, so to reduce overheating would it be recommended to use the default settings instead of limiting my process to cpu 4 to 7?
-
cpu 0 to 3 vs 4 to 7I realised that the default behaviour for cpu 0 to 3 on the VOXL2 is to run at a higher frequency (and utilisation) than cpu 4 to 7
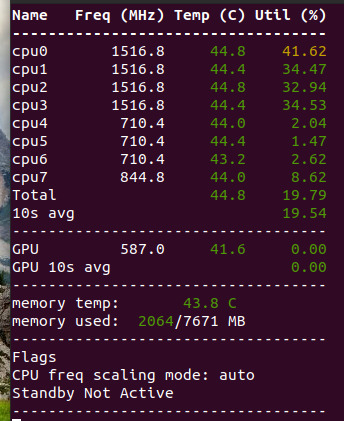
This happens even for a compute intensive process
Would it help to limit my process to cpu 4 to 7 as such?
Or should I stick to the default, using all available cores?
-
MAVSDK running on another computer for HITL@Eric-Katzfey will this work with SDK 1.0.0 too? would like to stick with that version for now since we have been testing with this version for our project
-
MAVSDK running on another computer for HITL@Eric-Katzfey I'm also unable to connect to QGC now (without HITL). On VOXL portal I can still see the camera and pointclouds, but not the status of the drone.
-
MAVSDK running on another computer for HITL@Eric-Katzfey Yes I still get the same error after power cycle
-
MAVSDK running on another computer for HITL@Zachary-Lowell-0 I was trying the MAVSDK example which didn't work but after trying the example, I can't run HITL anymore (which worked previously)... not sure what's the issue here?
-
MAVSDK running on another computer for HITLFor SITL, I can connect to PX4 with MAVSDK using port 14540. However, for HITL, port 14540 or 14551 does not work. VOXL2 wifi is configured in AP mode, and I have connected my laptop to it. I have also checked that voxl-vision-hub and voxl-mavlink-server are running, and my config files are as such:
voxl-vision-hub

voxl-mavlink-server
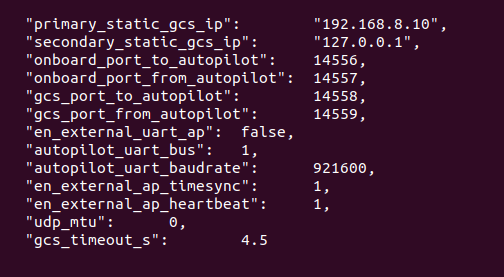
How can I get HITL to work with MAVSDK running on my linux computer? Or does it only work when MAVSDK is running on VOXL2 like the example here https://docs.modalai.com/mavsdk/?
-
SITL using VOXL2 PX4 software@Moderator @Zachary-Lowell-0 @Eric-Katzfey Thanks for your replies! I am looking to do multi-vehicle simulation so SITL would be ideal, but I would definitely try out HITL too (although that would be limited to only 1 vehicle in the simulation right?)
-
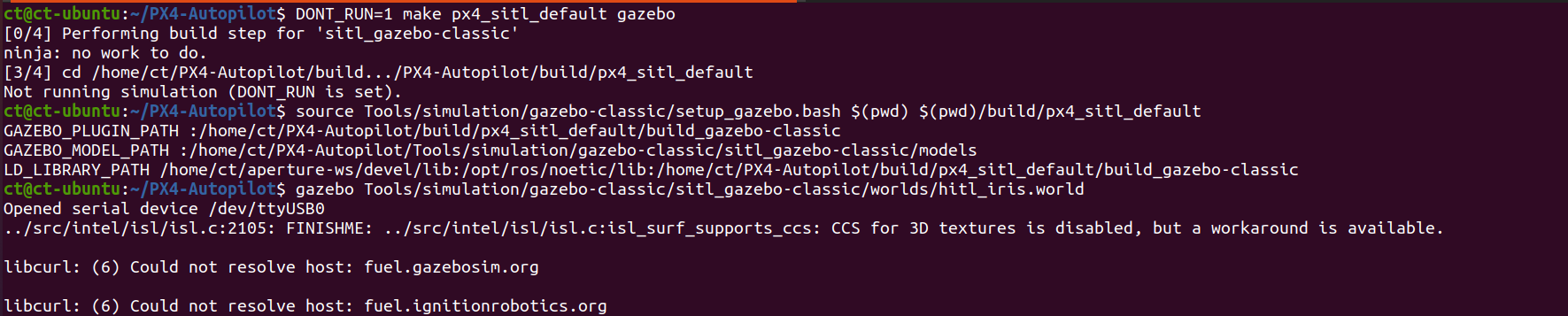
SITL using VOXL2 PX4 softwareIs it possible to run SITL using ModalAI's version of the PX4 software? I am using this repo https://github.com/modalai/px4-firmware/ and followed the same steps as I would with PX4's Autopilot repo:
- roslaunch my gazebo world
- in px4-firmware, make px4_sitl_default none
- start my own ros app
However, I recently discovered that there's the option to make modalai_voxl2 (instead of make px4_sitl_default), so I am not sure if I am actually using the ModalAI version. What is the correct way to do so?
I am unable to make modalai_voxl2 successfully:
$ make modalai_voxl2
-- PX4 version: v1.14.0-2.0.43-dev (1.14.0)
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.10", minimum required is "3")
-- PX4 config file: /home/xx/px4-firmware/boards/modalai/voxl2/default.px4board
-- PLATFORM posix
-- LINUX_TARGET y
-- TOOLCHAIN aarch64-linux-gnu
-- ROMFSROOT px4fmu_common
-- ROOTFSDIR /data/px4
-- PX4 config: modalai_voxl2_default
-- PX4 platform: posix
-- PX4 lockstep: disabled
-- The CXX compiler identification is unknown
-- The C compiler identification is unknown
-- The ASM compiler identification is unknown
-- Found assembler: /bin/aarch64-linux-gnu-gcc
CMake Error at CMakeLists.txt:219 (project):
The CMAKE_CXX_COMPILER:/bin/aarch64-linux-gnu-g++is not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "CXX" or the CMake cache entry CMAKE_CXX_COMPILER to the full path
to the compiler, or to the compiler name if it is in the PATH.CMake Error at CMakeLists.txt:219 (project):
The CMAKE_C_COMPILER:/bin/aarch64-linux-gnu-gccis not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "CC" or the CMake cache entry CMAKE_C_COMPILER to the full path to
the compiler, or to the compiler name if it is in the PATH.CMake Error at CMakeLists.txt:219 (project):
The CMAKE_ASM_COMPILER:/bin/aarch64-linux-gnu-gccis not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "ASM" or the CMake cache entry CMAKE_ASM_COMPILER to the full path
to the compiler, or to the compiler name if it is in the PATH.-- Warning: Did not find file Compiler/-ASM
-- Configuring incomplete, errors occurred!
See also "/home/xx/px4-firmware/build/modalai_voxl2_default/CMakeFiles/CMakeOutput.log".
See also "/home/xx/px4-firmware/build/modalai_voxl2_default/CMakeFiles/CMakeError.log".
Error: /home/xx/px4-firmware/build/modalai_voxl2_default is not a directory
make: *** [Makefile:232: modalai_voxl2] Error 1 -
Cannot arm Starling in Position modeI'm trying to arm Starling without GPS and have calibrated the VIO camera, but QGC just shows "MAV_CMD_COMPONENT_ARM_DISARM component temporarily rejected" without any other messages when I try to arm it in position mode. I didn't see any useful logs when I ran "voxl-px4 -d" too.
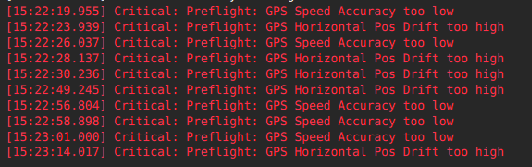
I tested that I can arm it in manual mode, although I have never successfully armed it in position mode before. Even when I tried with GPS, it kept giving me preflight failures (GPS speed accuracy, drift,etc.).
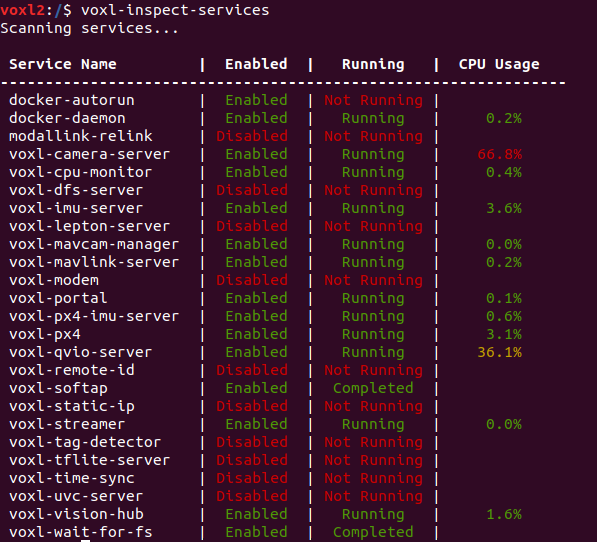
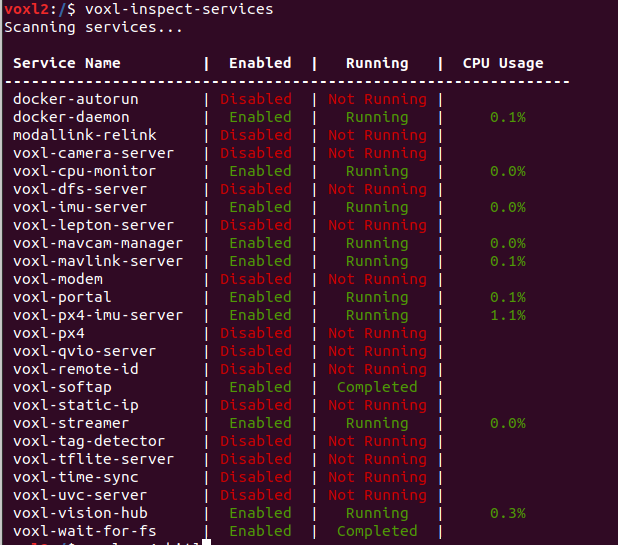
For this case without GPS, I'm running the following services
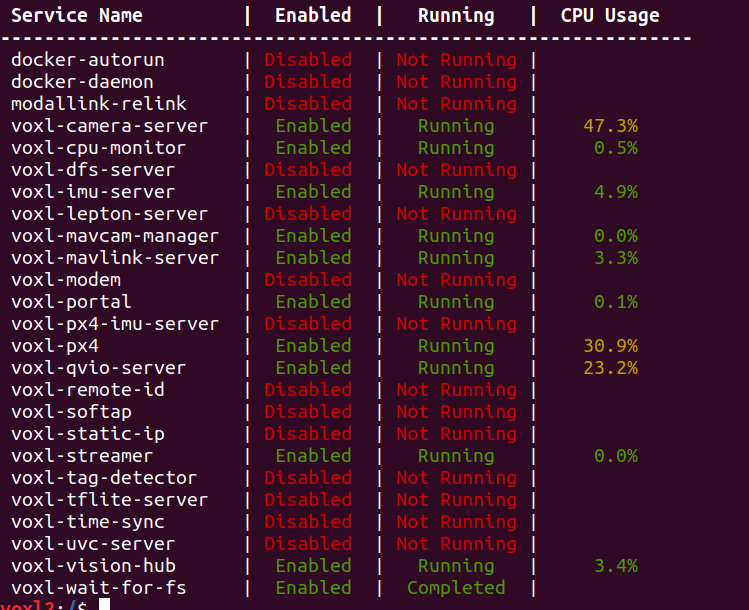
I can see that qvio is running

The mavlink messages are also being sent (mavlink_to_gcs)
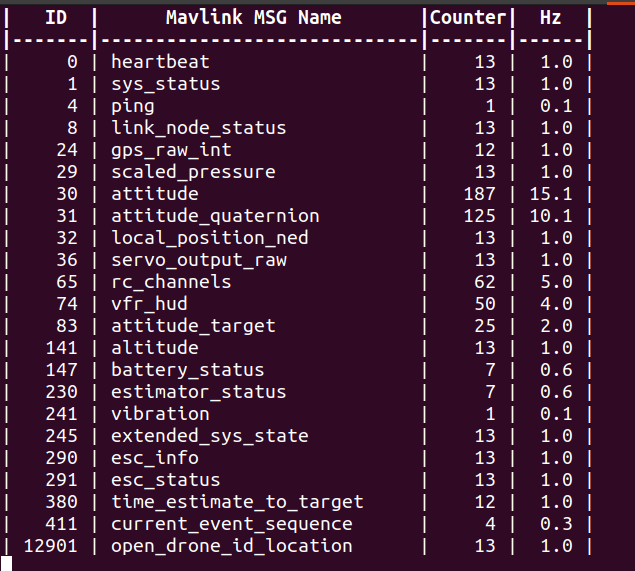
So I'm not sure why it doesn't arm?
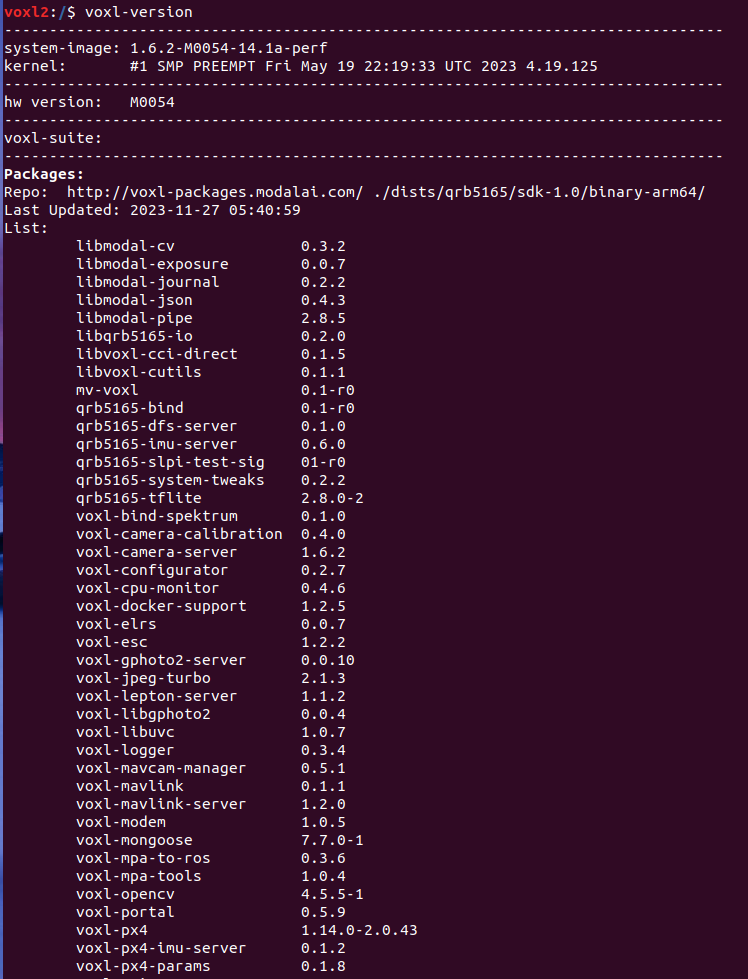
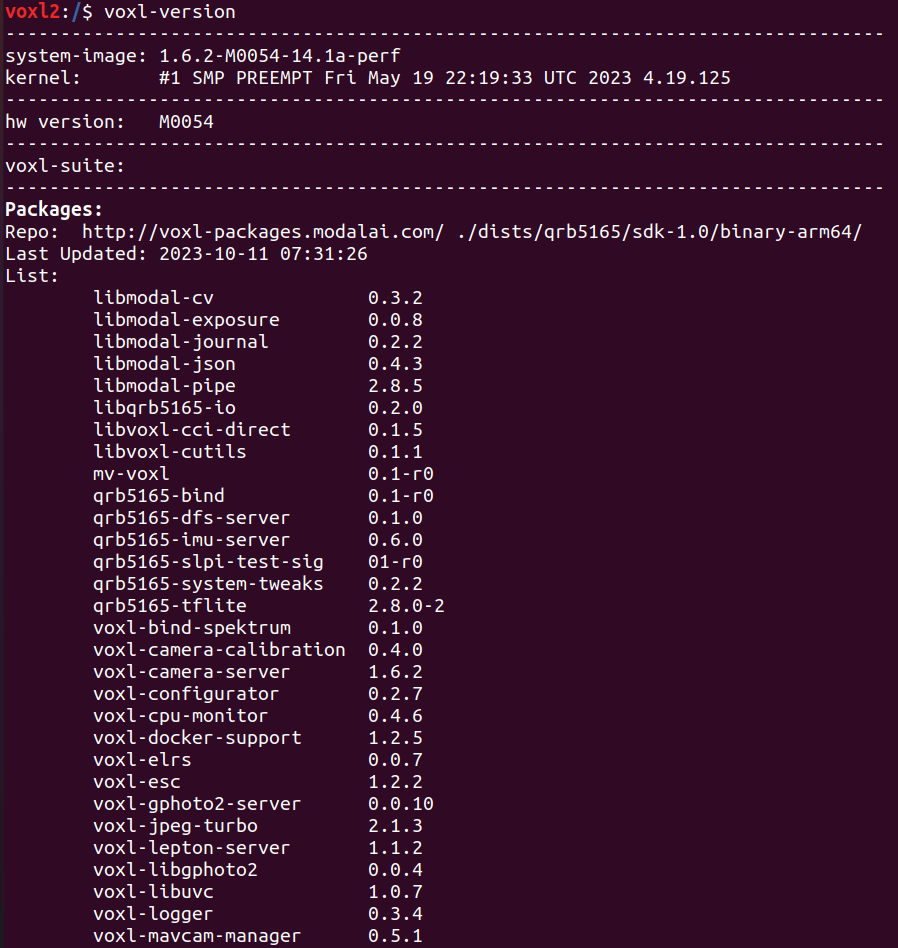
voxl-version: (I just realised the voxl-suite doesn't show 1.0.0? I had re-flashed VOXL SDK 1.0 on this previously)
-
HITL on VOXL2@Zachary-Lowell-0 @Eric-Katzfey Yup, all's good now after stopping voxl-qvio-server. Thanks for the help!
-
HITL on VOXL2@Eric-Katzfey Ah okay, I had voxl-mavlink-server disabled but turns out I didn't need to disable it in order to start voxl-px4-hitl. I saw the flight mode switching too but it stops after commenting out forward_mavlink_message
")
Should voxl-vision-hub be disabled for HITL? When I enable it, the drone (iris_hitl) drops and lands by itself after taking off
If it is meant to be disabled, how are we supposed to test MAVROS/ MAVSDK in HITL?
-
HITL on VOXL2@Eric-Katzfey Thanks for the explanation! However in my case I don't see the flight mode switching back at forth, it is just stuck at unknown. My mavlink inspector in QGC only shows one heartbeat message:
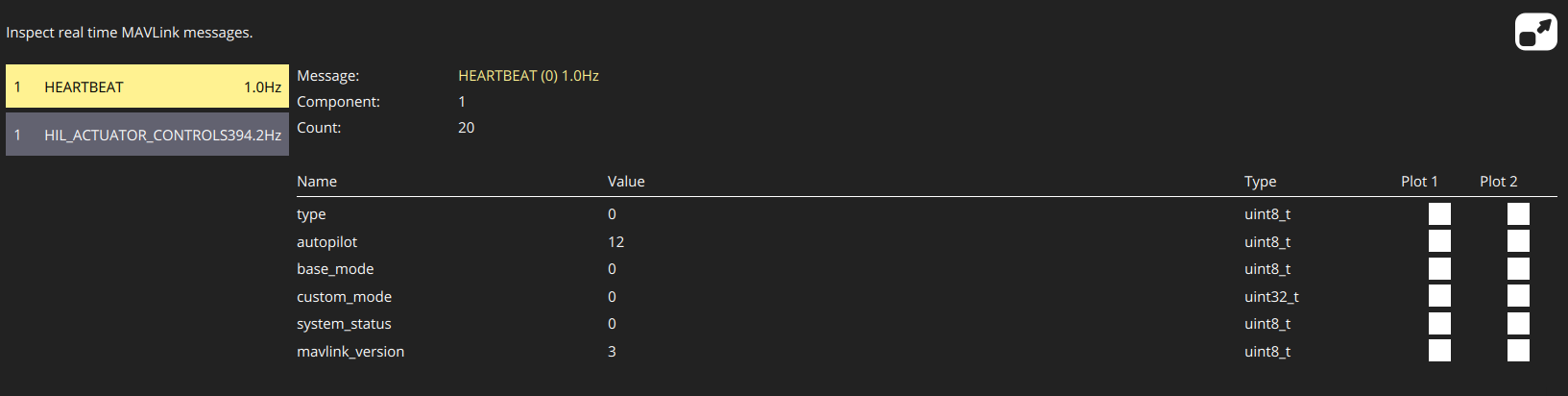
I tried VOXL2 in both station and softap mode, but still get the same result. I am connecting QGC to VOXL2 over UDP.
-
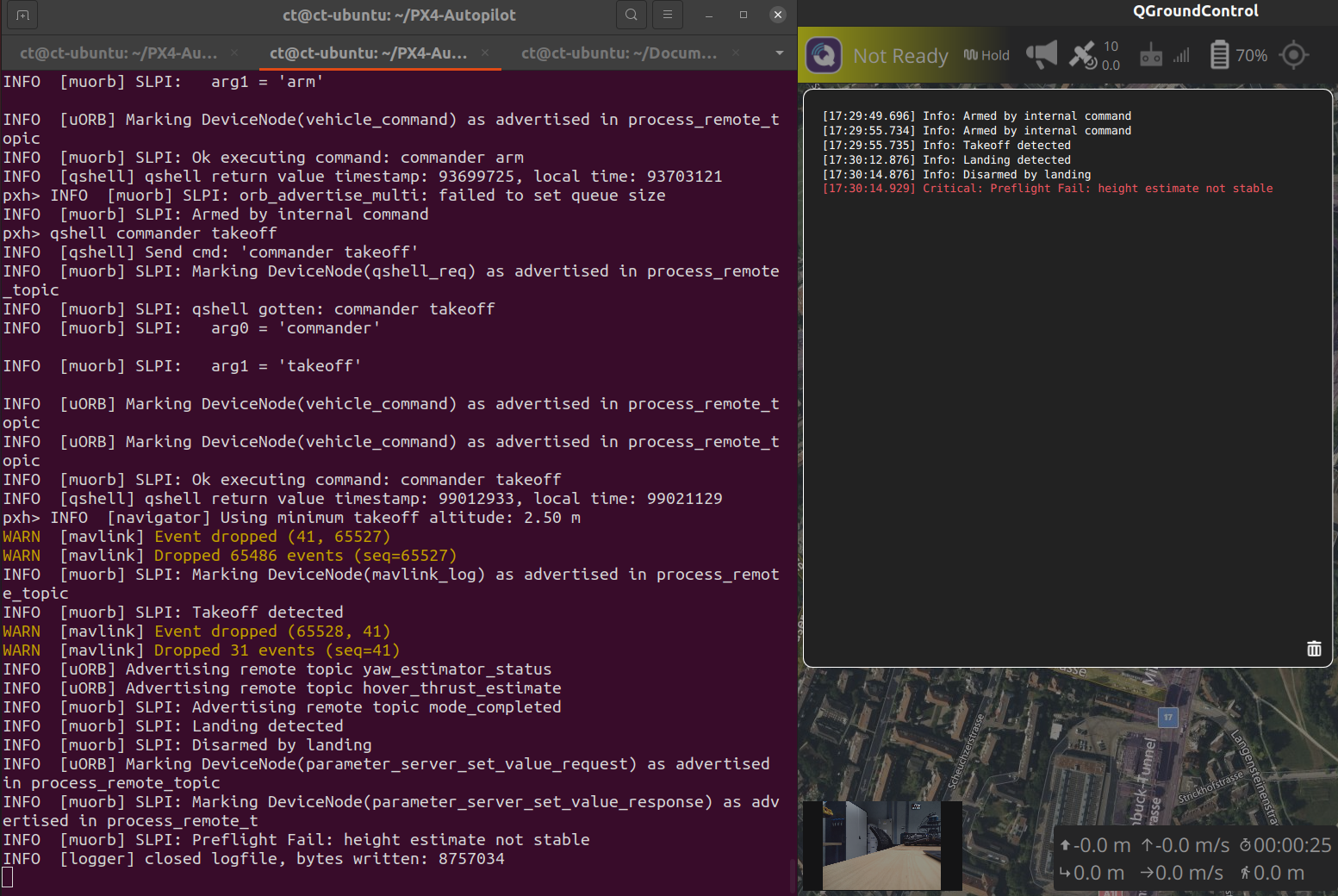
HITL on VOXL2@Eric-Katzfey Thanks! I am able to do a basic HITL now. However I get this error message on QGC

I see that the flight mode on QGC is always "unknown", is this expected?


-
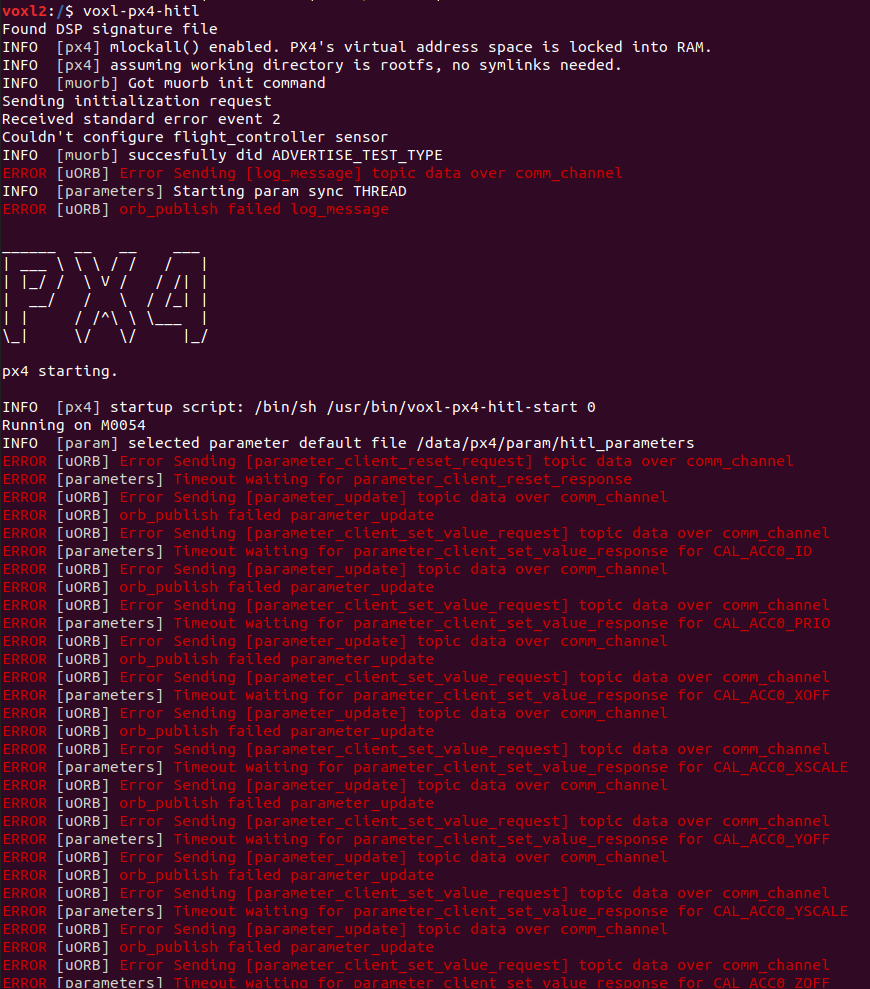
HITL on VOXL2I have changed the voxl-px4 version on Starling and added the 3 files (voxl-px4-hitl, voxl-px4-hitl-start, and voxl-px4-hitl-set-default-parameters.config) respectively from the response here https://forum.modalai.com/topic/2529/development-on-starling-v2/4
However, I am still unable to carry out HITL properly as shown
What could be the issue?
-
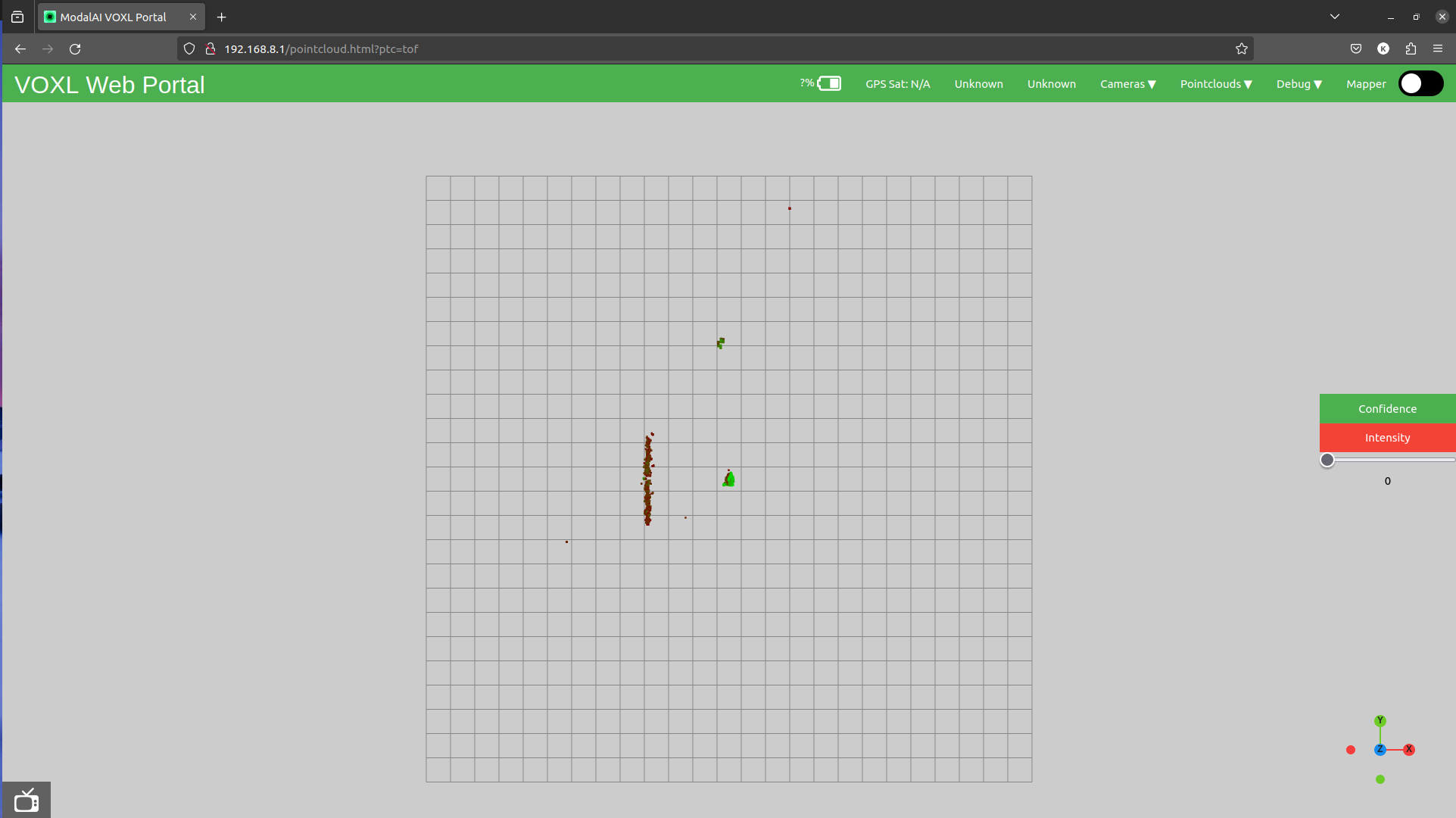
wrong tof frame id@Moderator okay, so I guess the frame ID in the /tof_pc ROS topic is misleading. Is the frame supposed to be the tof camera?
Also just to confirm if my app communicates over MAVROS to obtain the local position, the IMU being used is from imu_px4 and not imu_apps? (I'm using Starling)
-
wrong tof frame id@tiralonghipol @Moderator I'm also trying to use the /tof_pc data and would like more information on this world frame. Is the origin wherever the drone was when it boots up? What's the direction of the world frame?
The only information I can find is the transformation between the body frame and the tof camera in the extrinsics file, but I can't find anything about how this relates to the world frame.
-
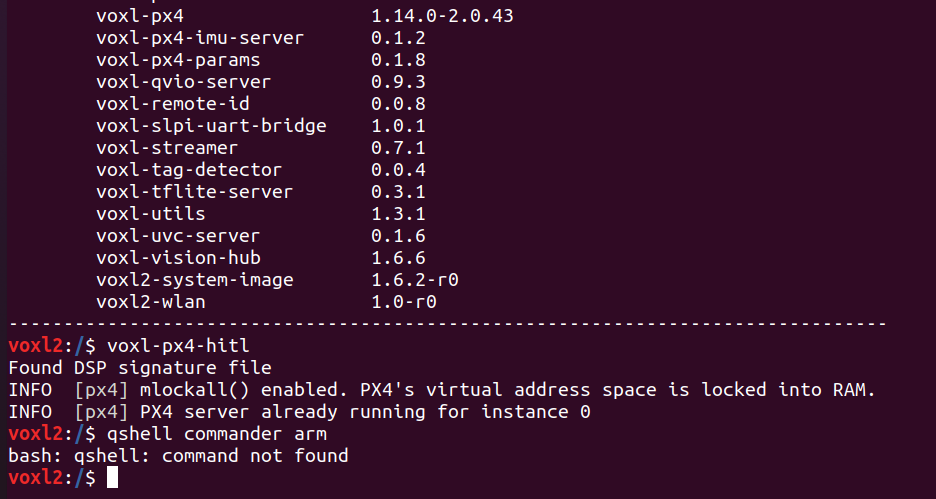
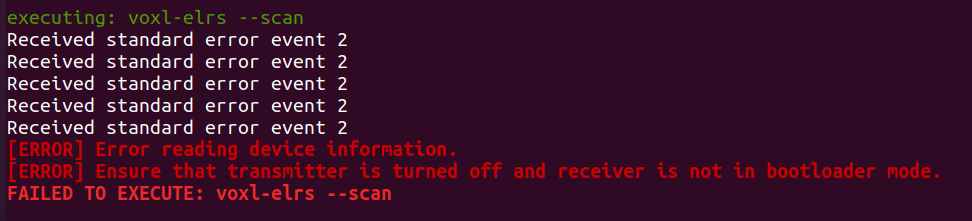
ELRS stuck on bootloaderI recently re-flashed VOXL SDK 1.0 onto Starling using the -f flag for ./flash-system-image.sh as mentioned in https://forum.modalai.com/topic/2242/image-flashing-error/3 as I was facing the same error. However, voxl-configure-mpa did not complete successfully as shown:
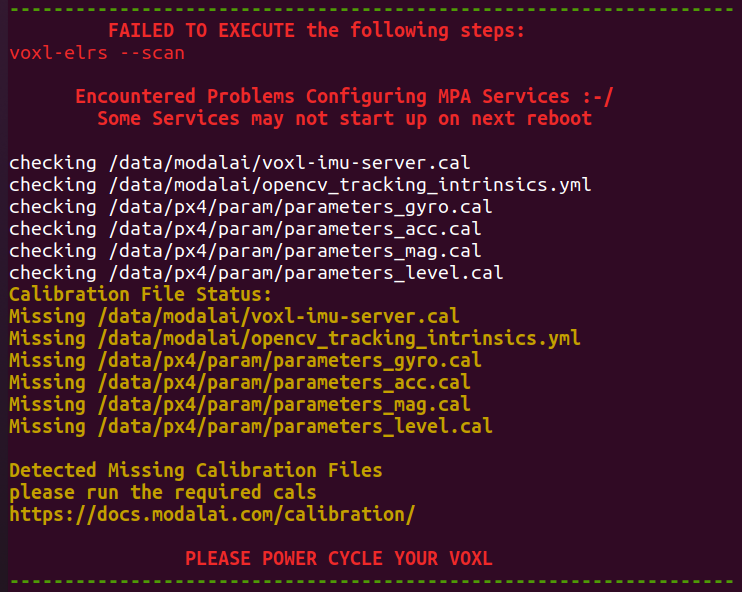
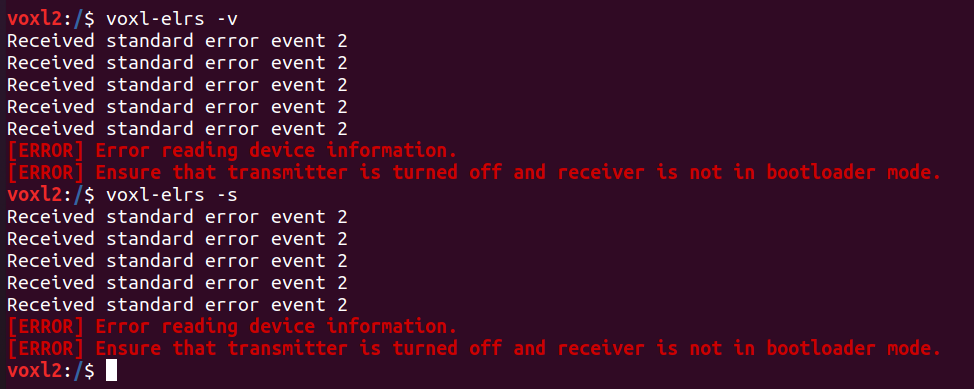
For the missing calibration files, I understand that I have to run the required calibration. However, the ELRS receiver now seems to be stuck in bootloader mode as the blue LED is always on (my transmitter is turned off). How can I resolve this?
-
Create VOXL package that requires both MAVSDK and libmodal_pipeI am able to separately
- Setup MAVSDK on VOXL2 by following the MAVSDK examples https://mavsdk.mavlink.io/main/en/cpp/examples/ (by building and running the code on VOXL2)
- Create a VOXL package by trying the voxl-cross-template and libmodal_pipe examples (making a deb package in voxl-cross docker before deploying it to VOXL2)
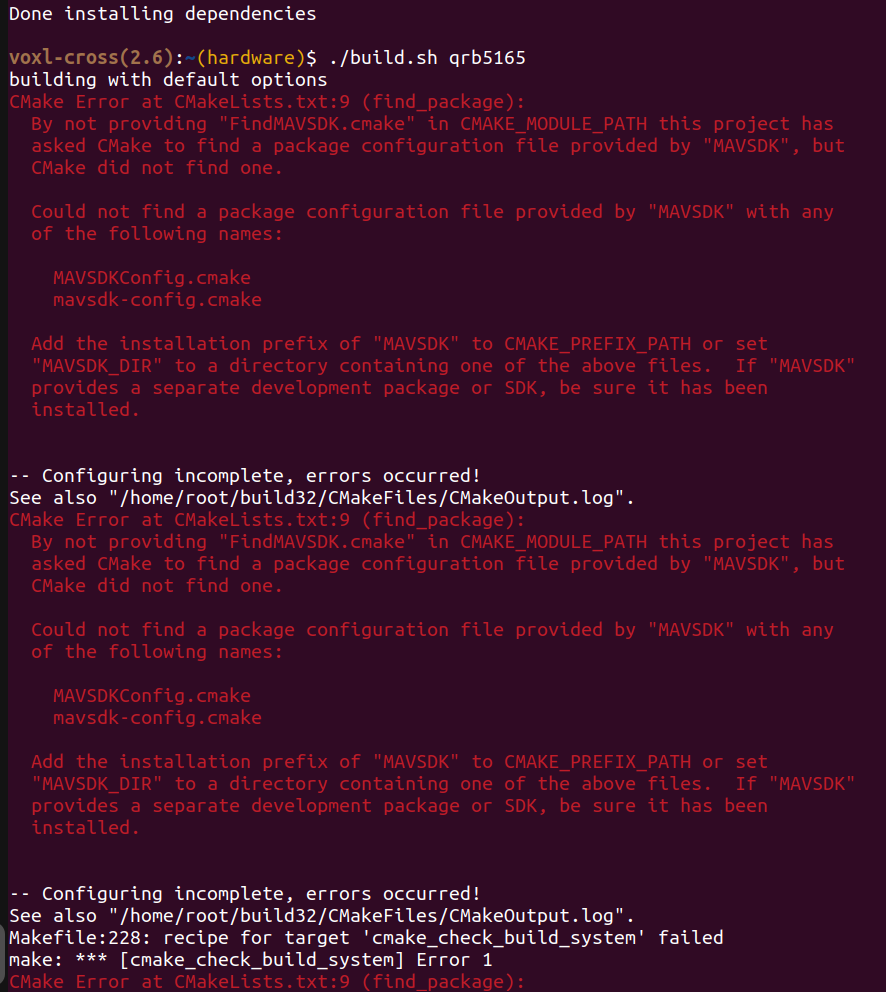
How can combine these to create a VOXL package that uses both MAVSDK and libmodal_pipe? I tried to follow the same steps when creating a VOXL package but am unable to build the project after installing build dependencies. How should I import MAVSDK for a VOXL package?
This is what I wrote in my CMakeList

and this is the error I'm getting
I also tried to follow the instructions here https://gitlab.com/voxl-public/voxl-docker-images/voxl-docker-mavsdk but I'm unable to build the image