I'mt trying to use a multiple camera streaming because I want to use the Hires to take pictures and the stereo cameras to calculate the distance, I tried to use the dfs service but couldn't obtain the distances using code, if any one know how to obtain the sensor data using python or to do the multiple streaming I would appreciate it
Posts
-
Is it possible to do a multiple camera streaming in the VOXL m500? -
How can I update or install python libraries inside my VOXL m500Im trying to update the mavsdk library and to install the serial library
Does anyone now how to do it?
-
How can I update the mavsdk library inside the droneHow can I upgrade the mavsdk library, I want to use the distance sensor to measure the value of the stereo camera, is there any other way to obtain the distance value of the stereo cameras, so I can use it in a python code?
-
How can I copy a file from my drone to my computer?I tried to do it with adb shell but I didn't really understand how to do it so I'm trying to do it through wifi
voxl:~$ cd .cache/ .config/ .profile.d/ .ros/ .ssh/ codigos_python/ voxl:~$ cd /data/ voxl:/data$ ls FTM_AP dnsmasq_d.leases mobileap_cfg.xml volumes adb_devid docker modalai voxl-docker-mavsdk-python-master audio graph network voxl-docker-mavsdk-python-master.tar build-image.sh iproute2 overlay voxl-docker-mavsdk-python-master.tar.gz configs l2tp_cfg.xml persist voxl-docker-mavsdk-python-master.tgz containers linkgraph.db repositories-overlay voxl-logger data logs tmp voxl-mavsdk-python-v1-1-placa2.tar db lost+found tombstones voxl-suite-offline-packages dhcpcd-wlan0.info misc trust web_root dnsmasq.conf mjrn usb voxl:/data$ scp /data/voxl-mavsdk-python-v1-1-placa2.tar dron@192.168.8.11:~/home/Desktop/Dron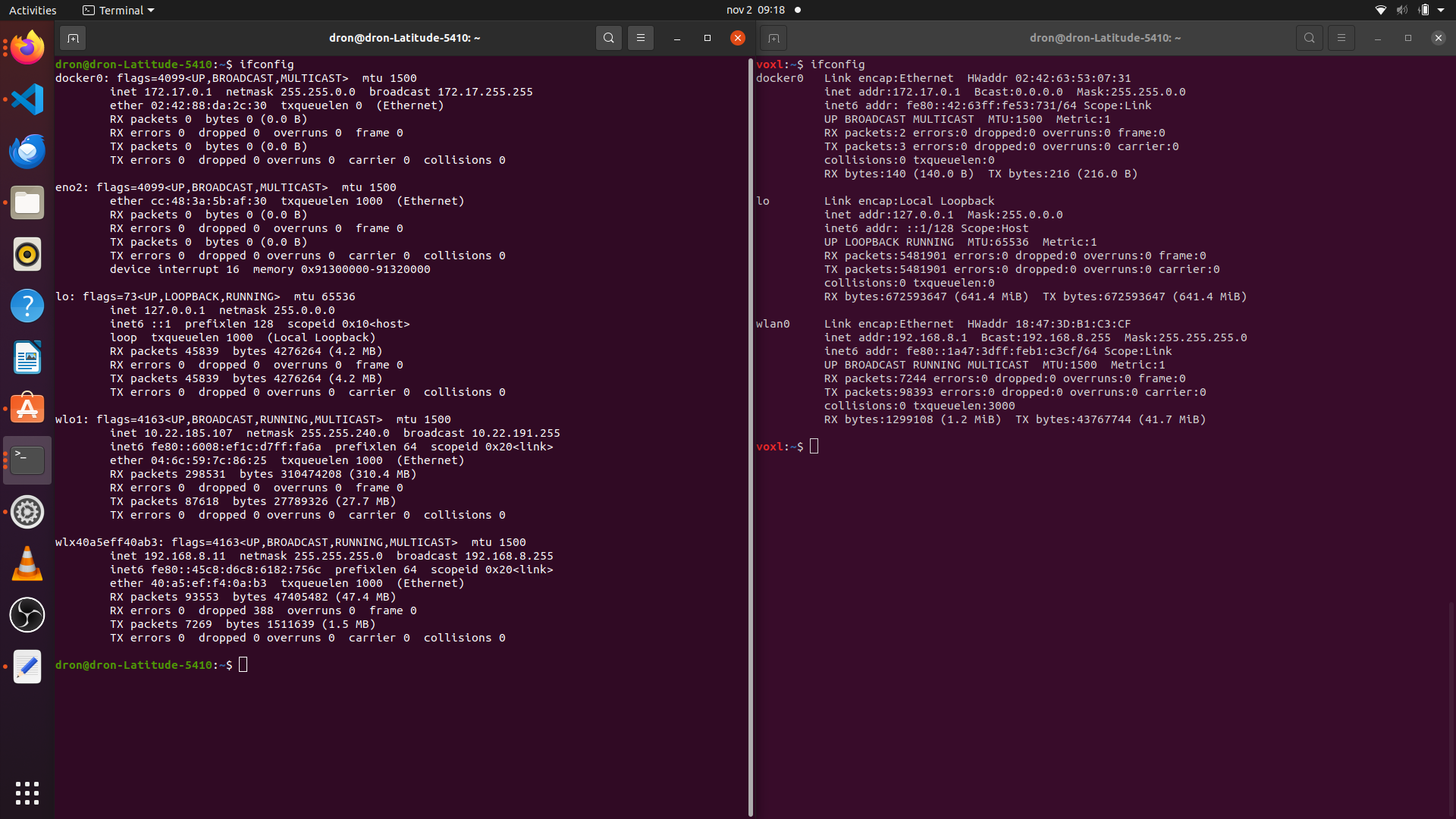
Can someone help me? -
I cant use pip to install a library on my m500@tom Thanks
-
I cant use pip to install a library on my m500 -
I cant use pip to install a library on my m500@tom Oh okay, let me try
-
I cant use pip to install a library on my m500I'm following this guide: https://docs.modalai.com/flight-core-pwm-esc-calibration/#procedure and I should be able to install a library on voxl, I'm connected in station mode, but I don't now what else to do
-
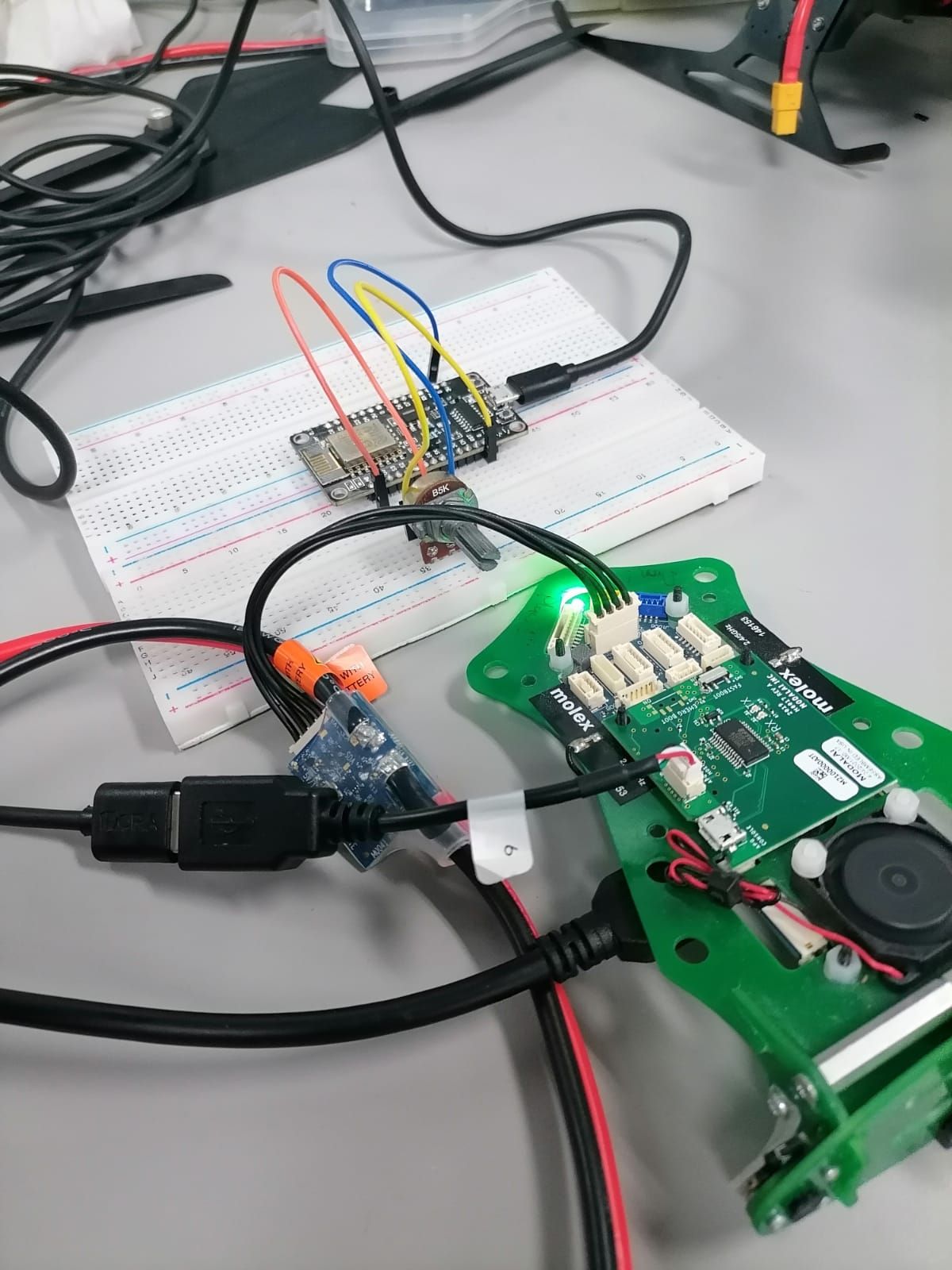
Can I send data through the j1006 port and read it with python?@tom I was able to pug the hardware to the expansion board that goes to the j13 port of the voxl flight,
lsusb the one im using is the Bus 001 Device 002: ID 1a86:7523 QinHeng Electronics HL-340 USB-Serial adapter
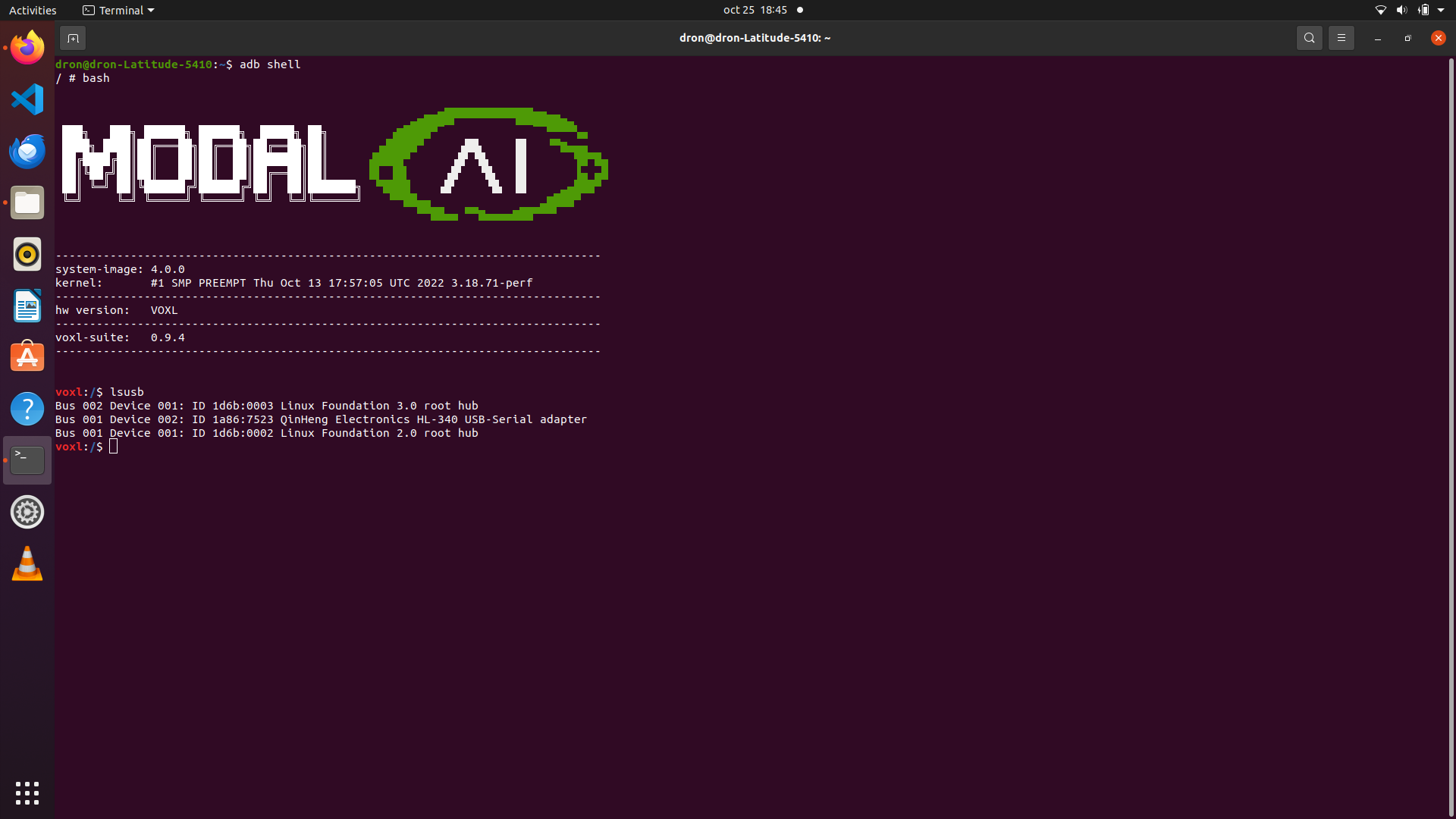
the success connection of the hardware
the setup
-
Can I send data through the j1006 port and read it with python?@tom the one included with m500 i think is the flight core v1, I'm currently using the expansion board that was included with the drone and I was able to detect the usb port, but know I need to install the serial library in the drone but I don't know how to install python libraries
-
Can I send data through the j1006 port and read it with python?I currently made a code to emulate a distance sensor, and I can read the usb port of my laptop to get the data of a nodemcu and a potentiometer, I want to try this inside the drone, so I can see if using a ultrasonic sensor is viable, I don't have the necessary cable at the moment to connect the nodemcu to the J10 port that has i2c and uart communication
this is my codeimport serial ser = serial.Serial('/dev/ttyUSB0') print(ser.name) while True: line = ser.readline() decoded_data = line.decode('utf-8') print(decoded_data)Does anyone know if this would work?
-
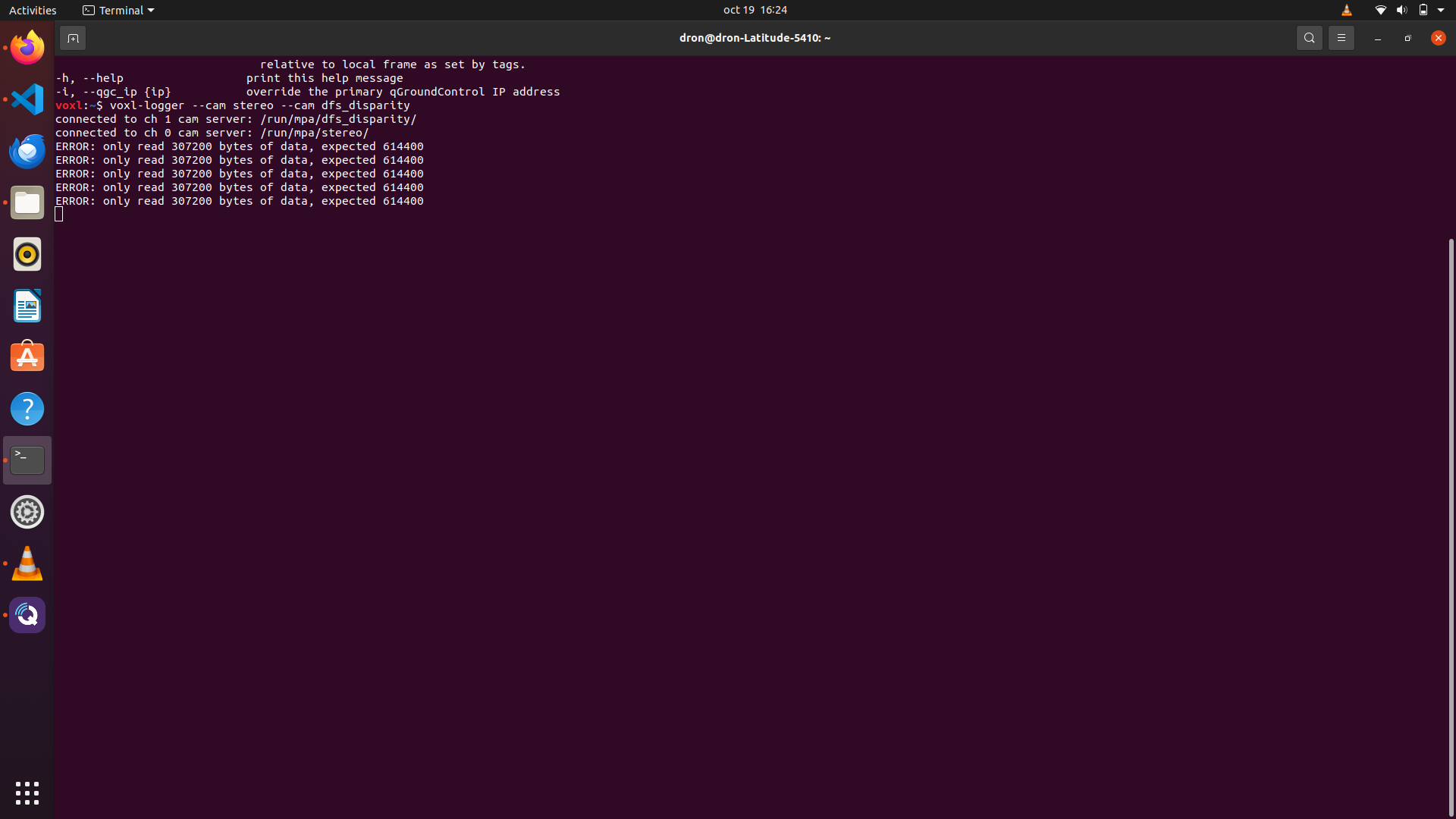
Error while voxl-logger --cam stereo -cam dfs_disparityI'm trying to use the obstacle avoidance for a proyect but I got some errors, the more recent one is this one
I try following this guide:https://docs.modalai.com/voxl-vision-px4-collision-prevention-0_9/
But I couldn't get through this part: Debugging Collision PreventionBut even though I decided to enable the voa to qgc and my drone keeps connecting and disconnecting and when I activate the obstacle avoidance its says I have an error in the pre arm check and the obstacle avoidance it's not ready
-
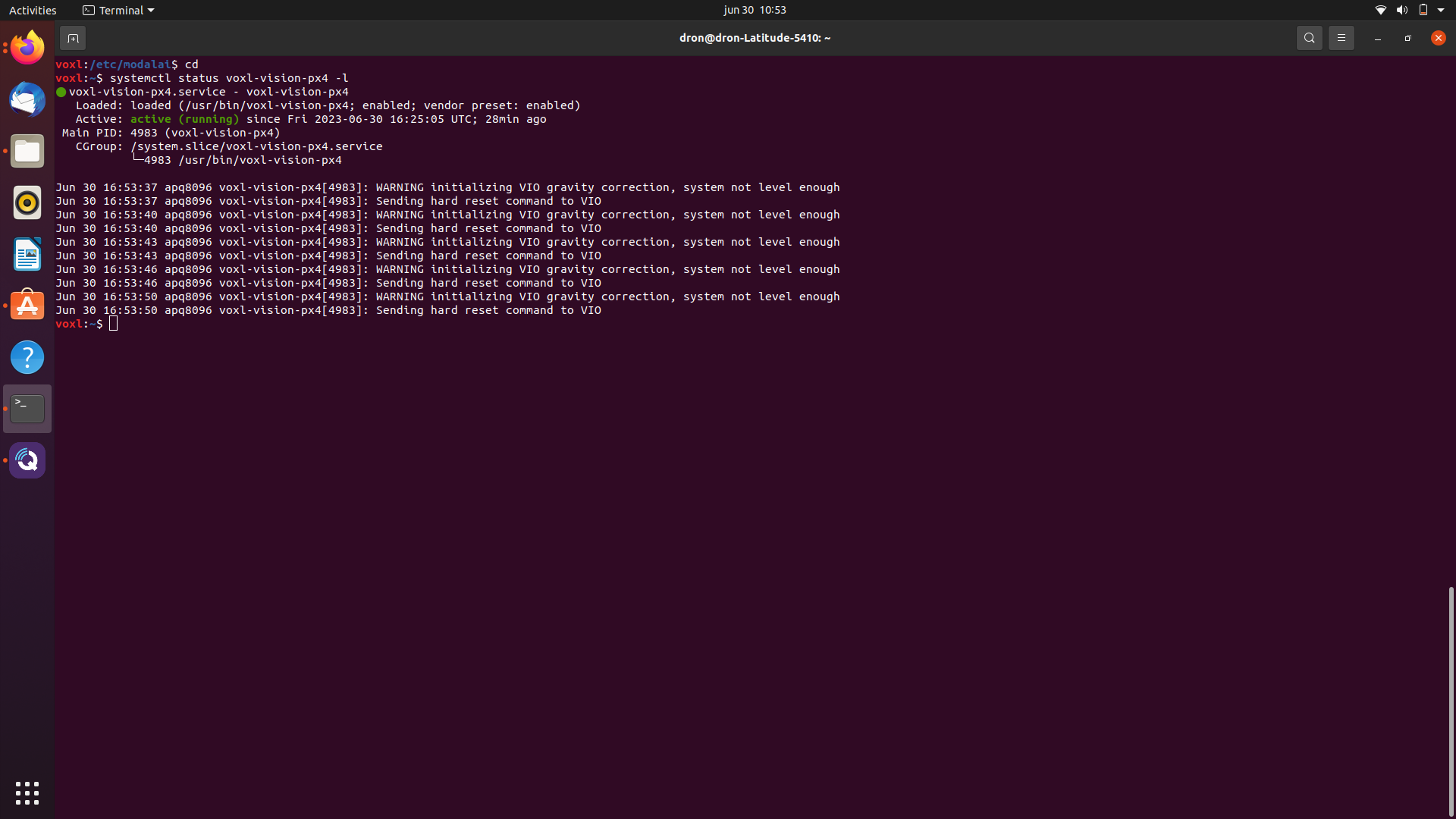
pre-arm check failed after enable the dfs serviceI enable the dfs service so I can keep my drone at a certain distance during a proyect, but when I was trying to arm the drone, the qgc show me the alert avoiding system not ready pre-arm check failed, and I noticed that the configuration inside the drone said "send voa to qgc false", and then I change it but it didnt affect the message
-
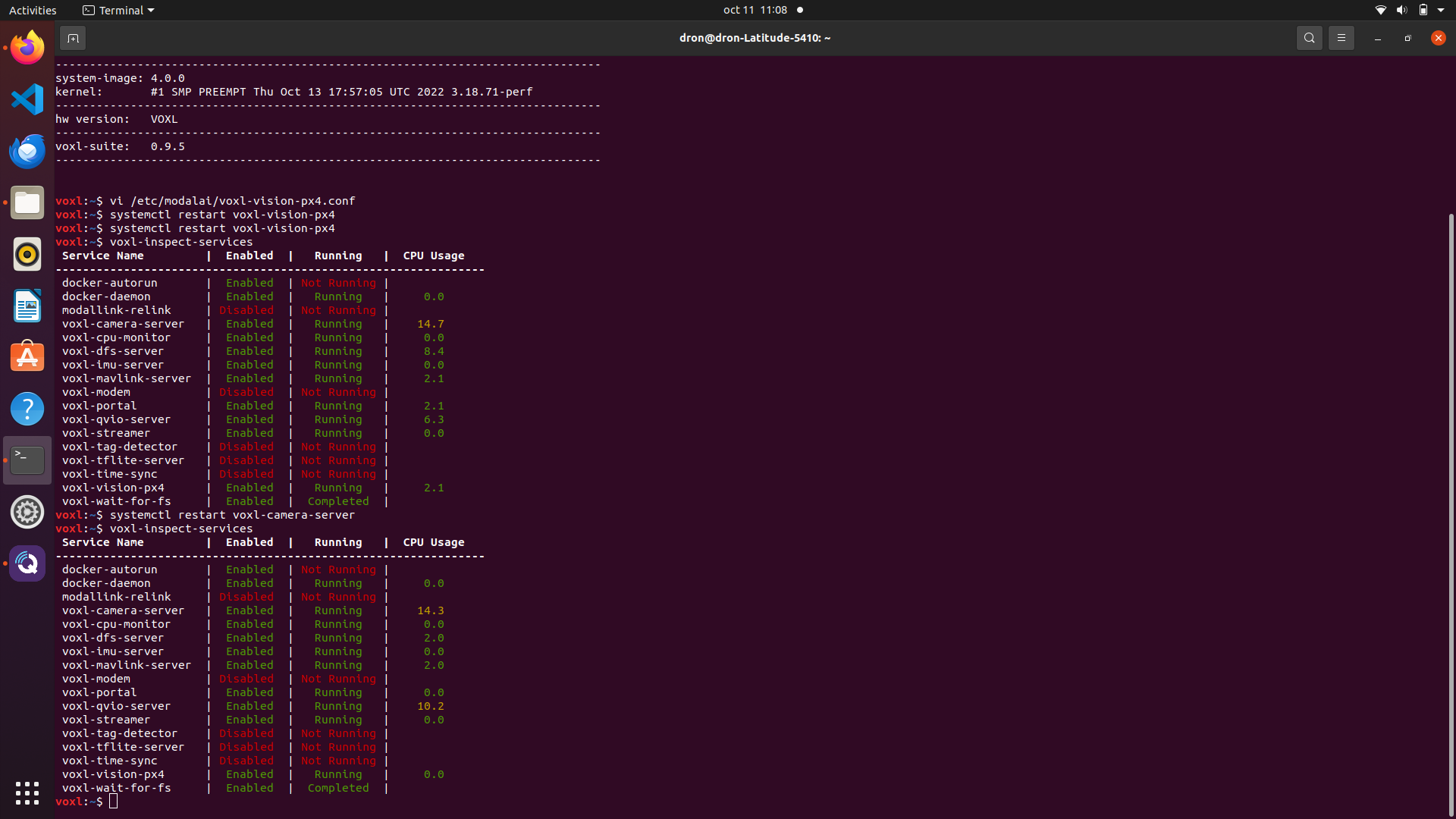
How can I trouble shoot my stereo cameras?My stereo cameras aren't working and y can configure the cameras on the m500 configuration, only hires and tracking
-
Can you connect a ultrasoninc sensor to a VOXL?@Eric-Katzfey Now that you mention that posibility, hoy can I send data through i2c?
-
Can you connect a ultrasoninc sensor to a VOXL?Does anyone know if its possible to communicate a ultrasonic sensor directly to the voxl board ?
-
Which 4g module can I use on the m500?@tom Which one
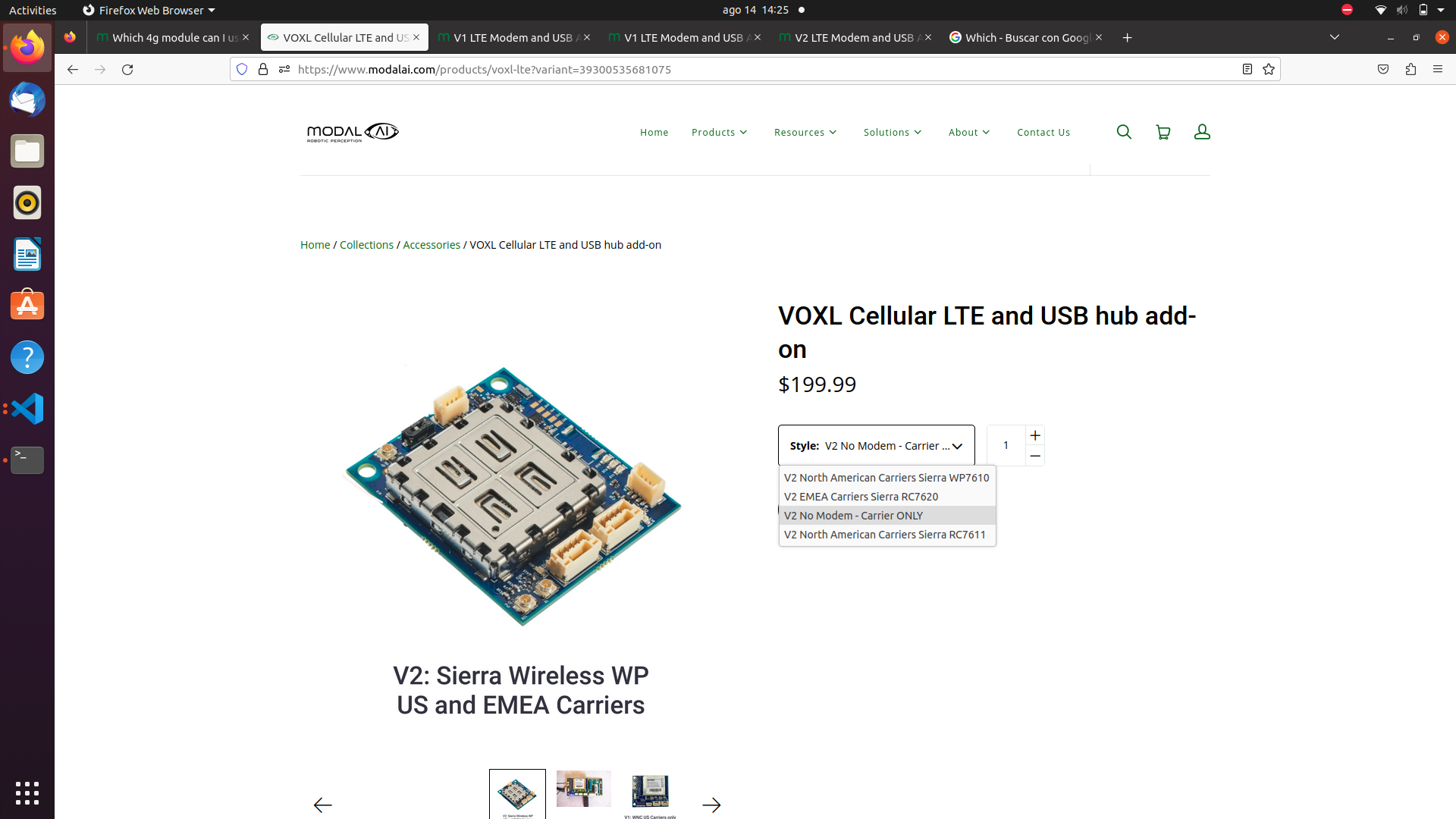
I'll be flying the drone in Mexico
-
Which 4g module can I use on the m500?I want to know the right model for the drone
-
How can I use MAVLINK to obtain odometry values -
Incoherence in the vi extrinsics.conf for my m500first we detected this problem
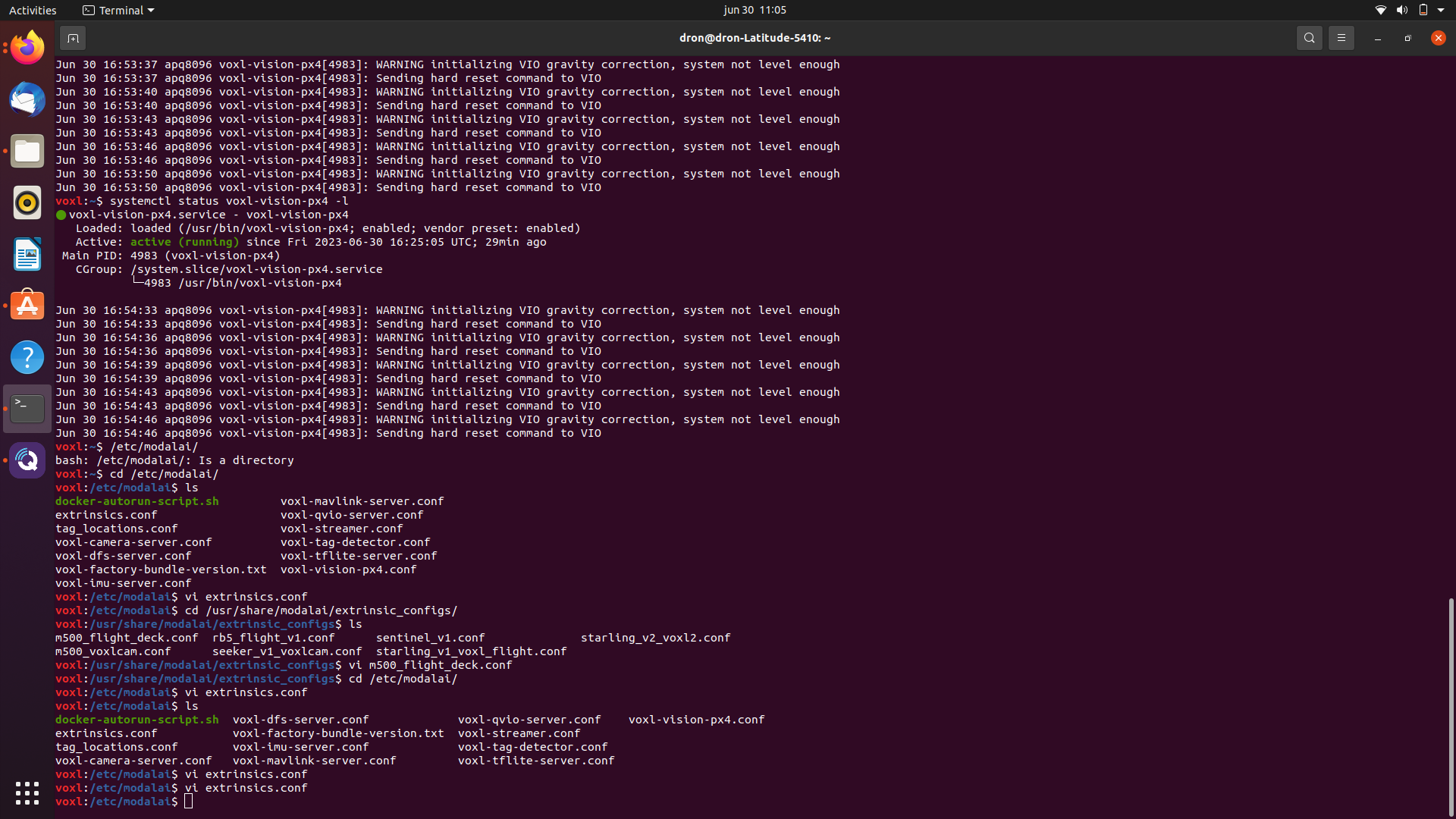
then we followed this topic, then when we checked the vi extrinsics.conf ith showed us the following info
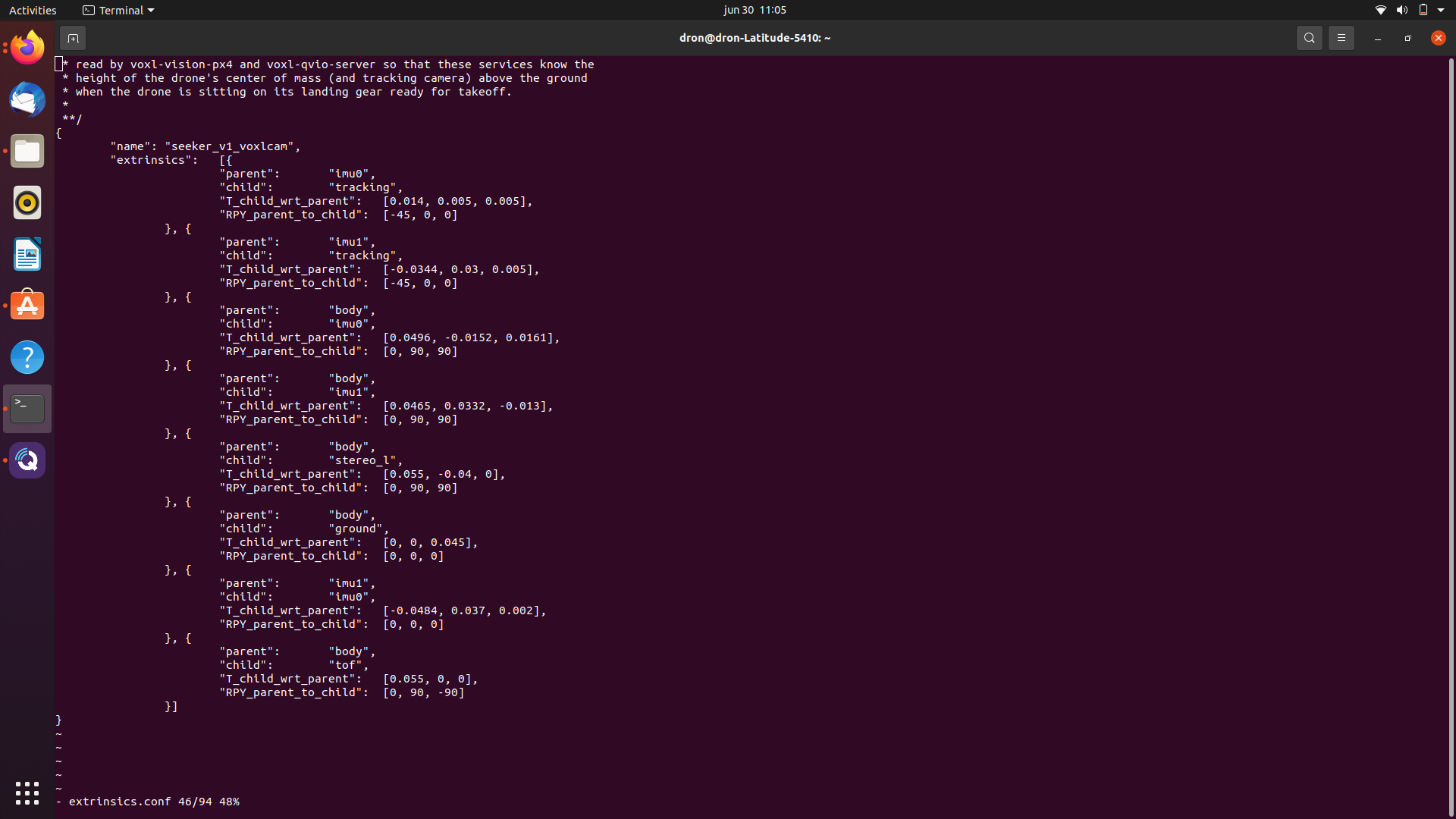
can someone help @tom